

48. Эдс, частота тока ротора, скольжение
Частота тока статора пропорциональна частоте вращения магнитного поля, созданного током статора: f1 = n0p / 60.
Так как ротор вращается в сторону поля (рис. 47), частота пересечения его обмотки магнитным полем будет определяться разностью частот вращения магнитного поля и ротора. Частота тока ротора:
f2 = (n0 – n)p / 60.
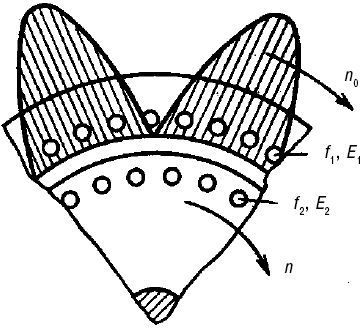
Рис. 47. Пояснение скольжения и частоты тока ротора
Из последних отношений f1 / f2 = n / (n0 – n) получаем выражение частоты тока ротора f2 (n0 – n) / n0 = f1s, где s – скольжение: s = (n0 – n) / n0.
Скольжение – величина безразмерная, представляющая собой частоту вращения ротора относительно поля статора, выраженную в долях частоты вращения поля статора.
Когда ротор неподвижен, n = 0,
s = (n0 – n) / n0 = 1, f2 = f1s = f1 × 1 = f1.
Если ротор вращается с частотой поля, то
s = (n0 – n) / n0 = 0, f2 = f1s = f2 × 0 = 0.
При неподвижном роторе его обмотка относительно поля находится в тех же условиях, что и обмотка статора. Поэтому ЭДС обмотки ротора может быть определена по аналогичной формуле, что и ЭДС обмотки статора:
E2k = 4,44f1ω2Фk02,
где ω2 – число витков фазы обмотки ротора;
k02 – обмоточный коэффициент обмотки ротора.
Когда ротор вращается:
E2 = 4,44f2ω2Фk02.
Из двух последних отношений вытекает, что:
E2 = E2k = f2 / f1;
E2 = E2k = f1s / f1 = E2ks.
Таким образом, ЭДС обмотки ротора пропорциональна скольжению.
При n = 0, s = 1, E2 = E2k;
при n = n0, s = 0, E2 = 0.
49. Электромагнитная мощность и потери в асинхронном двигателе
Мощность, потребляемая двигателем из сети, определяется по формуле:
![]()
Часть этой мощности (рис. 48) теряется в обмотке статора: ΔPобм1 = 3l21 r1, а часть ΔPСТ1 составляет потери в сердечнике статора от перемагничивания и вихревых токов.
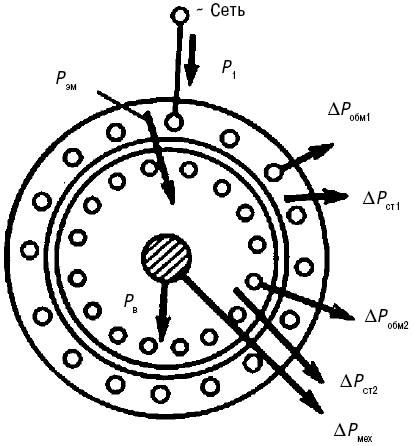
Рис. 48. Потери мощности в асинхронном двигателе
Мощность, передаваемая вращающимся магнитным полем ротору, называется электромагнитной мощностью и составляет:
Pэм = P1 – ΔPобм1 – ΔPCE1 = 3E2kl2 cos ψ1.
Часть электромагнитной мощности теряется в обмотке ротора: ΔPобм2 = 3l22 r2, а часть ΔPСТ2 составляет потери в сердечнике ротора от гистерезиса и перемагничивания.
Мощность, преобразуемая в механическую, равна:
P мех = Pэм – ΔPобм2 – ΔPCТ2.
Небольшая часть механической мощности теряется на трение в подшипниках ротора о воздух и вентиляцию.
Мощность, развиваемая двигателем на валу:
Pв = Pмех – ΔPмех.
Все потери мощности, кроме вентиляционных, которые представляют собой затраты мощности на продувание воздуха внутри двигателя с целью лучшего охлаждения, превращаются в теплоту и нагревают двигатель.
50. Момент, развиваемый двигателем
Известно, что мощность равна произведению момента на частоту вращения: P = Mω.
В асинхронном двигателе произведение электромагнитного момента, возникающего в результате взаимодействия тока ротора с магнитным полем, на частоту вращения поля представляет собой электромагнитную мощность:
Mэмω0 = Pэм.
Механическая мощность, развиваемая двигателем, равна произведению электромагнитного момента на частоту вращения ротора:
Mэмω = Pмех.
Если пренебречь потерями мощности в сердечнике ротора вследствие их малости относительно потерь в обмотке ротора, то разность электромагнитной и механической мощностей будет равна потерям мощности в обмотке ротора:
Pэм – Pмех = ΔPобм2 = 3l22 r2.
Получим:
Mэмω0 – Mэм ω = 3l22 r2,
откуда:

Заменив ω0 – ω через ω0s, получим выражения
электромагнитного момента:
и электромагнитной мощности:
Момент, развиваемый двигателем на валу, будет меньше электромагнитного момента на величину ΔMмех, обусловленную силами трения в подшипниках, ротора о воздух и вентиляционными потерями:
M = Mэм – ΔMмех.
Потери момента ΔMмех для асинхронных двигателей средней и большой мощности относительно малы. В практических расчетах часто принимают, что:
M = Mэм.
Тогда
Потери в обмотке ротора – ΔPобм2 = Pэмs.
Механическая мощность, развиваемая под двигателем, составляет:
Pмех = Pэм(1 – s).
Из этих выражений вытекает, что при неподвижном роторе, когда s = 1, вся электромагнитная мощность преобразуется в теплоту в обмотке ротора, а механическая мощность равна нулю.
При номинальном режиме работы, когда s ≈ 0,02 – 0,08, почти вся электромагнитная мощность (0,92–0,98) преобразуется в механическую и только небольшая ее часть (0,02–0,08) преобразуется в теплоту в обмотке ротора.