

43. Тормозные режимы работы двигателей
Как известно, для сокращения времени торможения при остановке производственных машин и механизмов часто применяются механические тормоза. Сокращение времени торможения, особенно в случае непродолжительного цикла работы, приводит к существенному повышению производительности машин и механизмов. Недостатками механических тормозов являются быстрый износ трущихся поверхностей, сложность и необходимость периодического регулирования тормозящего усилия, необходимость дополнительного места для размещения тормоза и его соединения с механизмом.
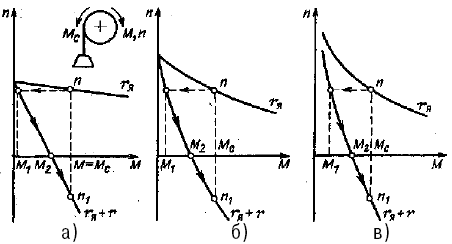
Рис. 44. Три тормозных режима работы электродигателя
Все перечисленные недостатки устраняются, если для указанных целей вместо механического тормоза использовать свойства электродвигателей работать в тормозных режимах, т. е. работать по сути дела, в качестве генератора, и развивать не вращающий, а тормозной момент.
Во многих подъемно(транспортных машинах (кранах, лифтах, эскалаторах и т. д.), где возможно движение под действием сил тяжести, с помощью тормозного момента электродвигателя обеспечивается постоянная, установившаяся скорость опускания грузов.
Электродвигатели постоянного тока могут работать в трех тормозных режимах:
1) в режиме противовключения;
2) в генераторном режиме с отдачей энергии в сеть;
3) в режиме динамического торможения.
В любом из тормозных режимов электродвигатель работает как генератор, преобразует, например, кинетическую энергию движущихся частей либо потенциальную энергию опускающегося груза в электрическую энергию.
Режим противовключения представляет собой режим, в котором якорь двигателя под действием внешнего момента либо запаса кинетической энергии вращается в направлении, противоположном тому, в котором он должен был бы вращаться при данной схеме его включения (рис. 44а) в двигательном режиме (или вхолостую) .
Генераторным режимом с отдачей энергии в сеть называется режим, в котором двигатель под действием внешнего момента либо запаса кинетической энергии вращается с частотой, большей частоты вращения холостого хода (n > n0), в том же направлении, в котором он должен был бы вращаться при данной схеме его включения (рис. 44б) в двигательном режиме (или вхолостую).
Режим динамического торможения возникает при отключении якоря двигателя от сети и замыкании его на резистор, называемый резистором динамического торможения (рис. 44в).
44. Потери мощности и кпд машин постоянного тока
Преобразование электрической энергии в механическую с помощью двигателей и механической в электрическую с помощью генераторов сопровождается потерями энергии, чему соответствуют определенные потери мощности. От значений потерь мощности зависит важнейший энергетический показатель машин постоянного тока – их КПД. Потери мощности в машинах приводят к их нагреванию.
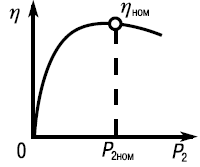
Рис. 45. Зависимость КПД машин постоянного тока от полезной мощности
В машинах постоянного тока различают следующие основные виды потерь мощности.
1. Потери мощности в сопротивлениях цепи якоря: ΔPя =Iя2rя. Как видно, потери мощности ΔPя зависят от нагрузки машины. Поэтому их называют переменными потерями мощности.
2. Потери мощности в стали ΔPс, вызванные главным образом вихревыми токами и перемагничиванием магнитопровода якоря при его вращении.
Частично эти потери возникают из(за вихревых токов в поверхностном слое полюсных наконечников, вызванных пульсацией магнитного потока при вращении якоря.
3. Механические потери мощности ΔPмех, причиной которых является трение в подшипниках, щеток о коллектор, вращающихся частей о воздух.
4. Потери мощности в цепи параллельной или независимой обмотки возбуждения: ΔPв = UвIв = I2в rв.
Потери ΔPс, ΔPмех, ΔPя при изменении нагрузки машин меняются незначительно, вследствие чего их называют постоянными потерями мощности.
КПД машин постоянного тока:
η = P2 / P1,
где Р2 – полезная мощность машины (у генератора это электрическая мощность, отдаваемая приемнику, у двигателя – механическая мощность на валу);
Р1 – подводимая к машине мощность (у генератора это механическая мощность, сообщаемая ему первичным двигателем, у двигателя – мощность, потребляемая им от источника постоянного тока; если генератор имеет независимое возбуждение, то Р1 включает в себя также мощность, необходимую для питания цепи обмотки возбуждения).
Мощность Р1 может быть выражена следующим образом:
P1 + P1 + SΔP,
где ΔP – сумма перечисленных выше потерь мощности.
С учетом последнего выражения η = P2 / (P1 + SΔP).
Когда машина работает вхолостую, полезная мощность Р2 равна нулю и η = 0. Характер изменения КПД при увеличении полезной мощности зависит от значения и характера изменения потерь мощности.
График зависимости η (Р2) приведен на рисунке 45.
При увеличении полезной мощности КПД сначала возрастает при некотором значении Р2, достигает наибольшего значения, а затем уменьшается. Последнее объясняется значительным увеличением переменных потерь, пропорциональных квадрату тока. Машины рассчитывают обычно таким образом, чтобы наибольшее значение КПД находилось в области, близкой к номинальной мощности Р2ном. Номинальное значение КПД машин мощностью от 1 до 100 кВт лежит примерно в пределах от 0,74 до 0,92 соответственно.