

1. Цели и задачи исследования.
Цель исследования – практическое знакомство с основными законами управления линейной следящей системой; изучение влияния структуры и параметров регулятора на динамику и точность системы.
Достижение поставленной цели связано с необходимостью решения следующих задач:
- изучения типовых линейных законов управления;
- сравнительного анализа законов управления на основе экспериментальных данных о показателях динамики и точности системы.
1) Система с п-регулятором (переключатель 6).
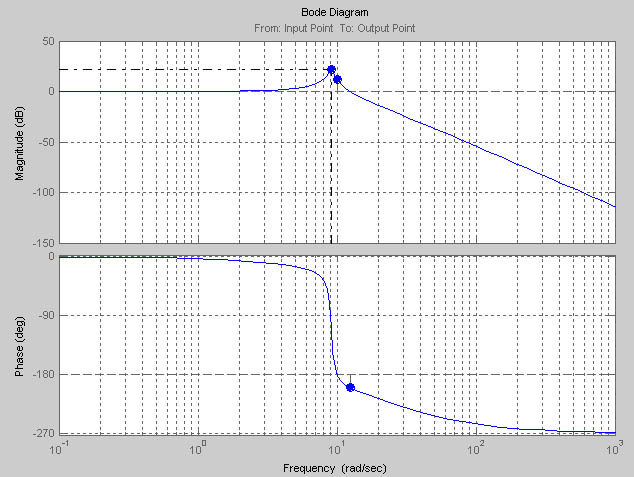
ЛАЧХ и ЛФЧХ такой системы имеют вид:
Вид переходных процессов
а)при подаче на вход единичного ступенчатого сигнала
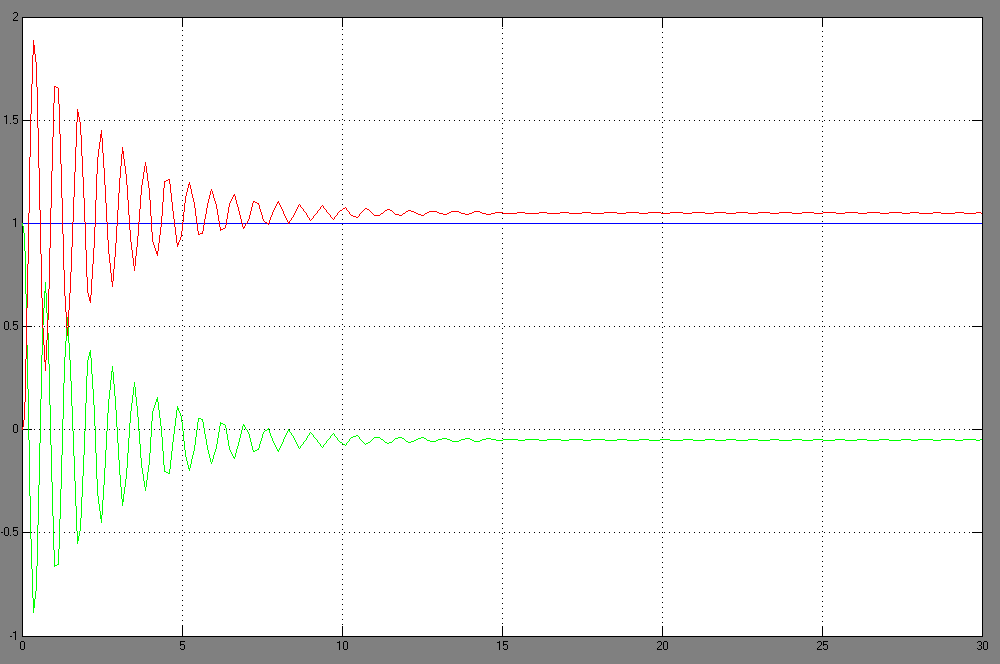
По графику переходного процесса определяем время регулирования и перерегулирование:
tр=10,4 с, = 82%.
Установившаяся ошибка
при отсутствии возмущающего момента
Мс
![]() .
.
Установившаяся ошибка,
обусловленная наличием возмущающего
момента:
![]()
б) при подаче на вход линейно нарастающего сигнала
Установившаяся ошибка
![]() .
.
в) при подаче на вход квадратичного сигнала:
Установившаяся ошибка:
![]()
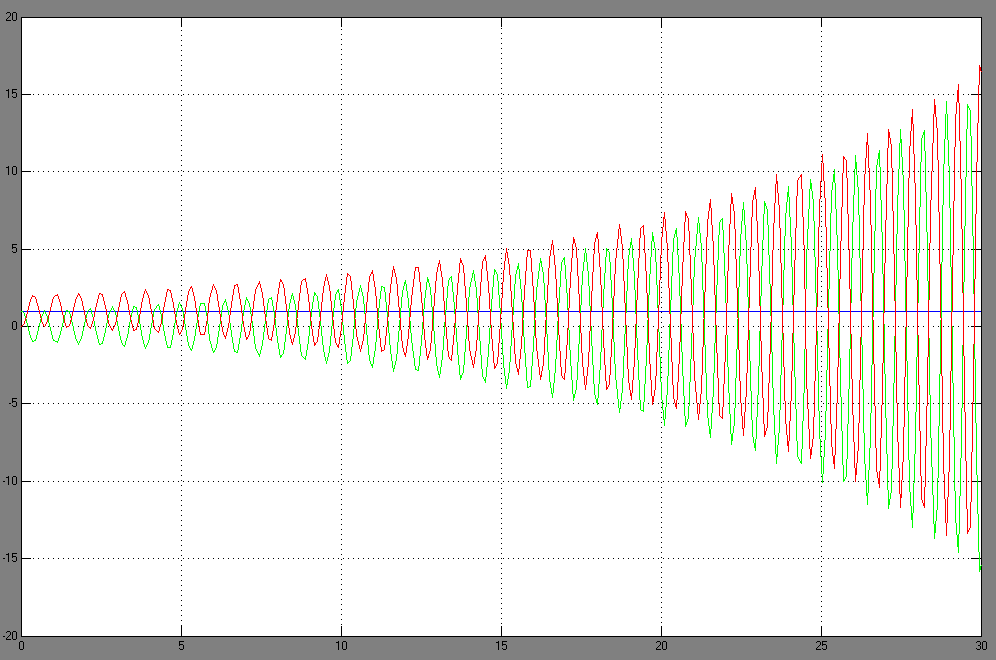
г) при подаче на вход гармонического сигнала:
Установившаяся ошибка:
![]()
2) Система с ПИ-регулятором (переключатели 2,6).

ЛАЧХ и ЛФЧХ такой системы имеют вид:
а) при подаче на вход единичного ступенчатого сигнала:
Замкнутая система неустойчива.
3) Система с ПИД-регулятором(переключатели 2,5,6).
ЛАЧХ и ЛФЧХ такой системы имеют вид:
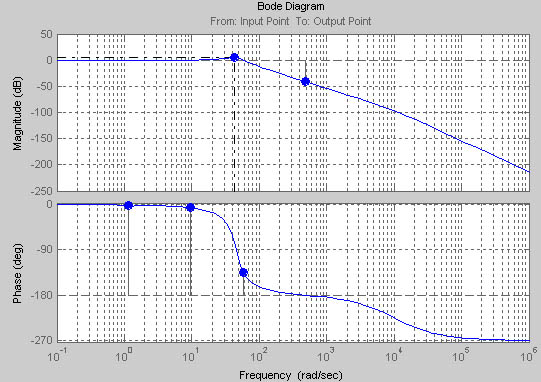
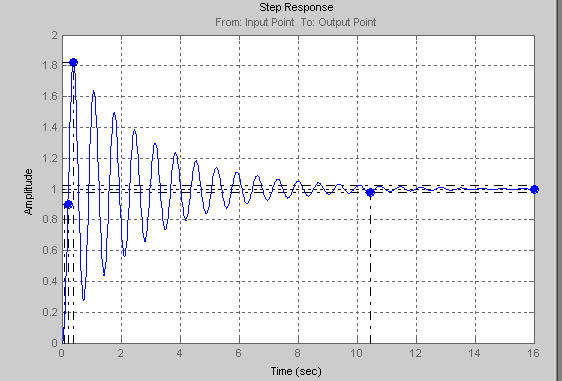
График переходного процесса при подаче на вход единичного ступенчатого сигнала:
Установившаяся ошибка .
По графику переходного процесса определяем время регулирования и перерегулирование. tp=10 с, = 37,6%.
Замкнутая система устойчива.
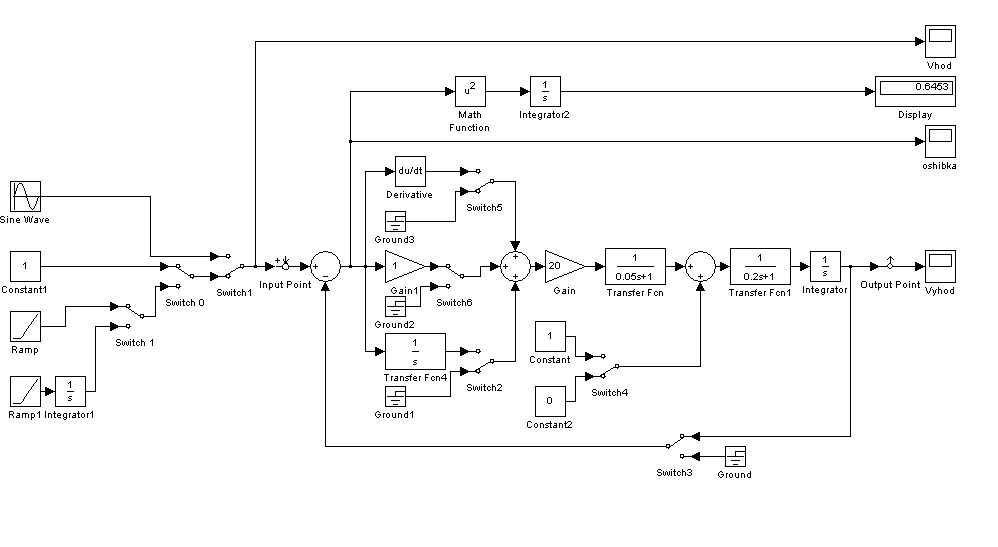
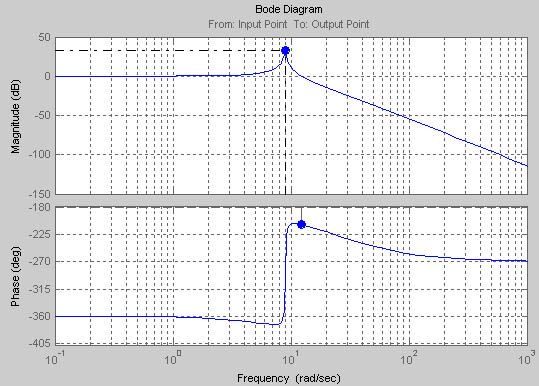
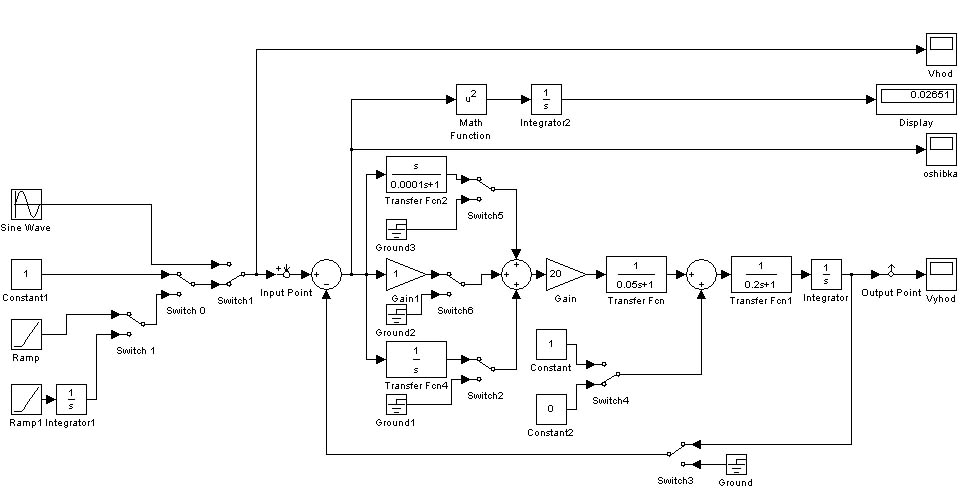
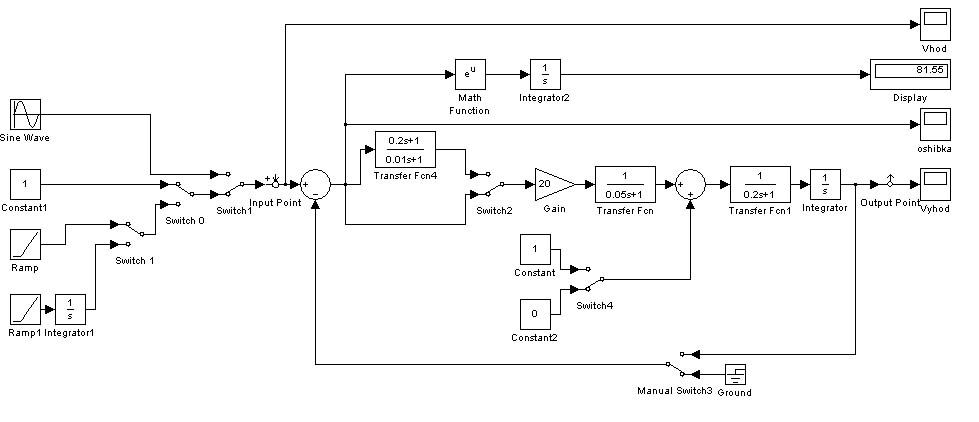
4) Коррекция с помощью дифференцирующего фильтра.
Система с дифференцирующим фильтром имеет вид:
ЛАЧХ и ЛФЧХ такой системы имеют вид:
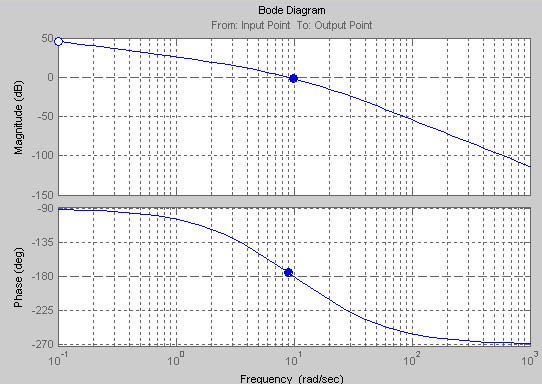
Замкнутая система является устойчивой.
Вид переходных процессов
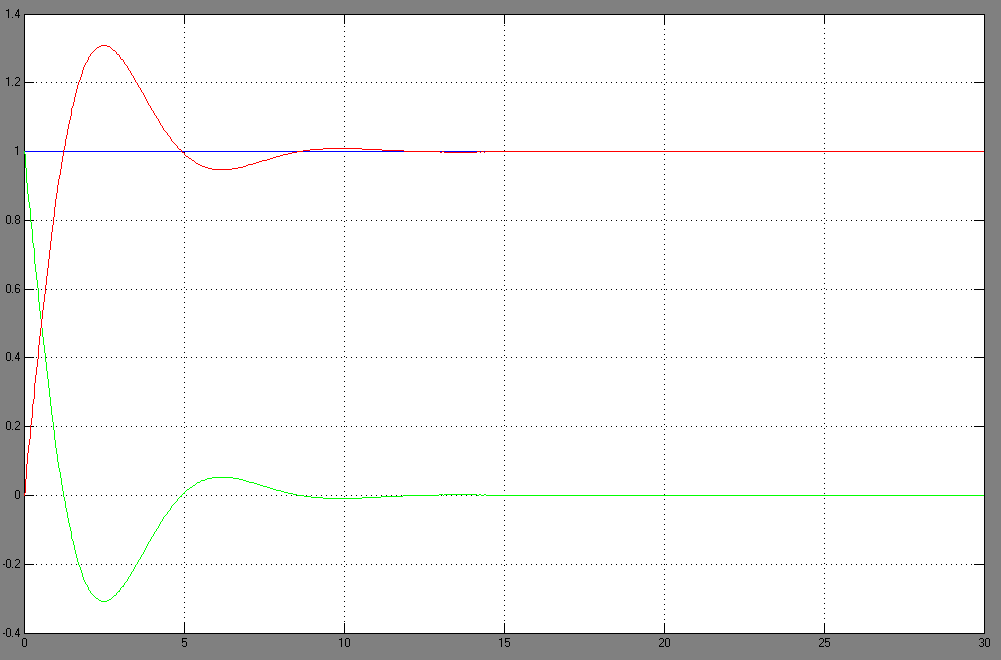
а)при подаче на вход единичного ступенчатого сигнала:
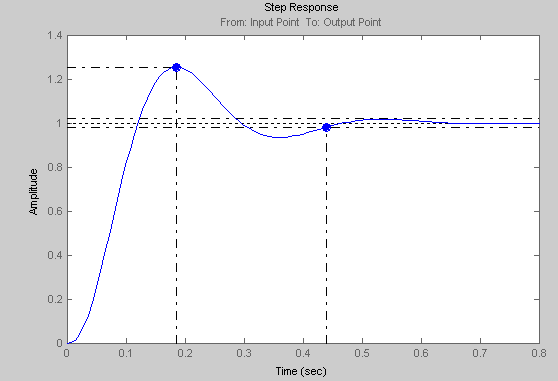
По графику переходного
процесса определяем время регулирования
и перерегулирование. tp=0,44сек,
![]() .
.
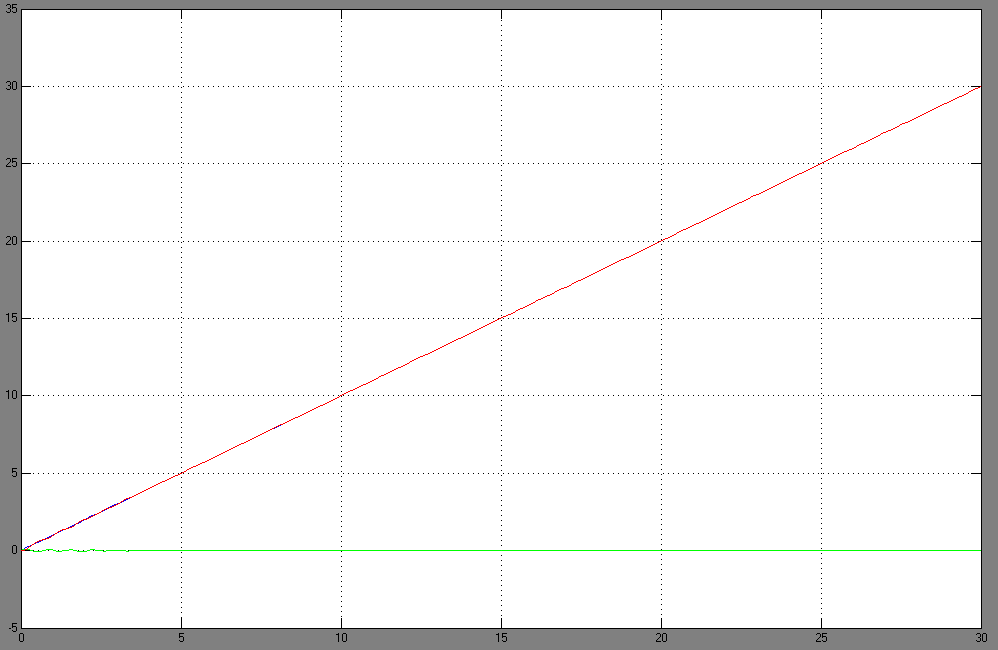
б) при подаче на вход линейно нарастающего сигнала:
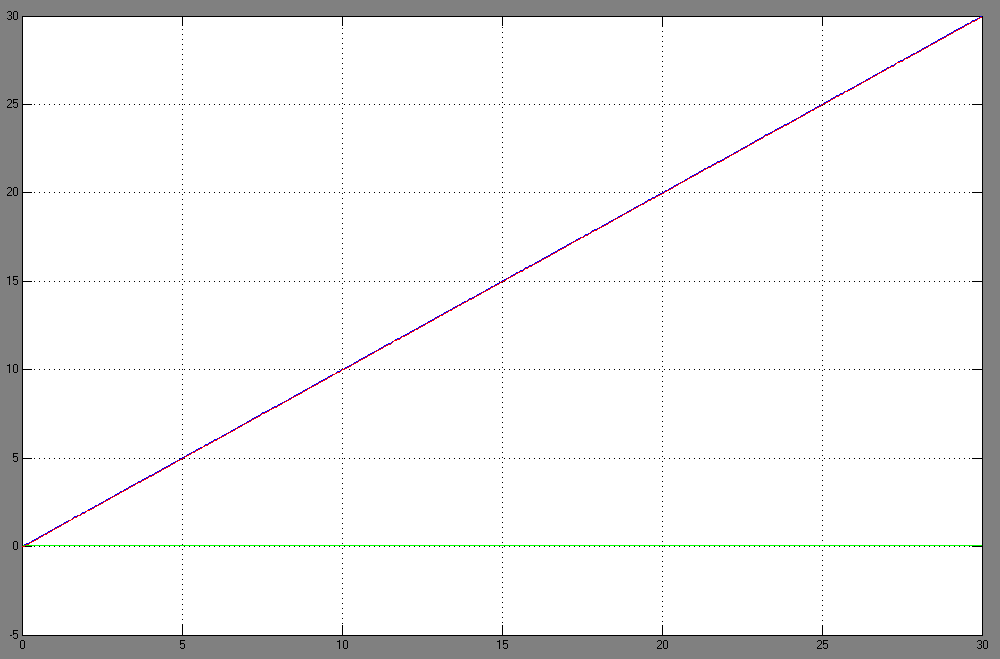
Установившаяся ошибка .
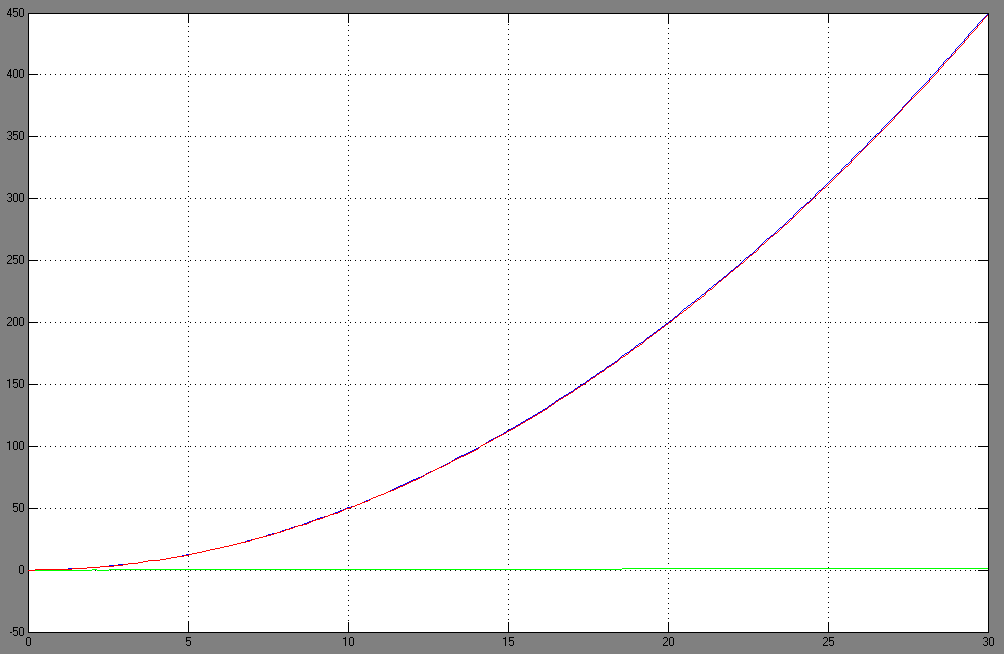
в) при подаче на вход квадратичного сигнала:
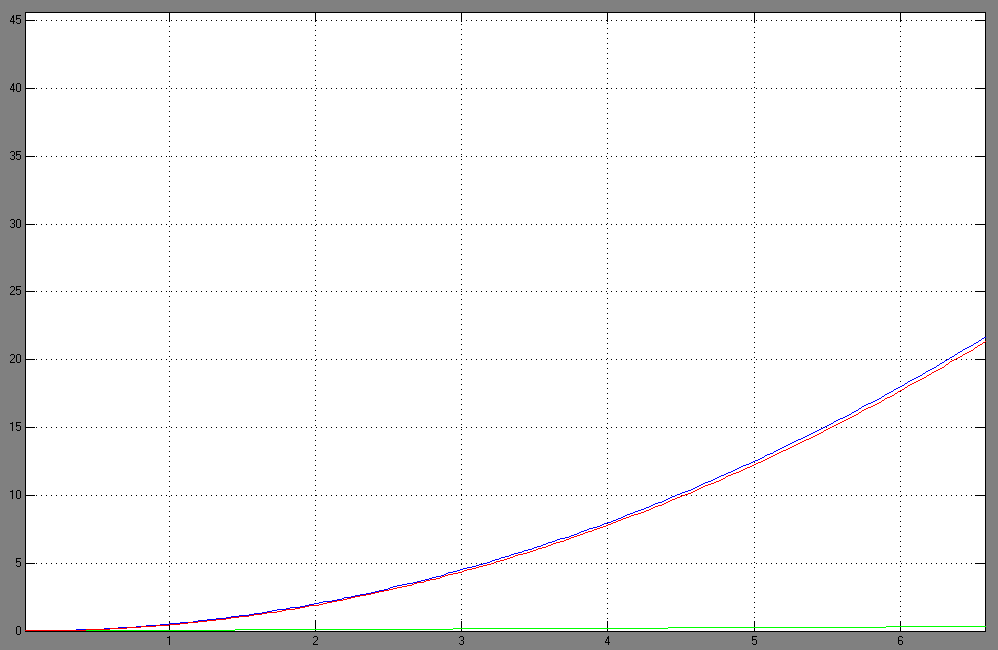
Установившаяся ошибка
![]() .
.
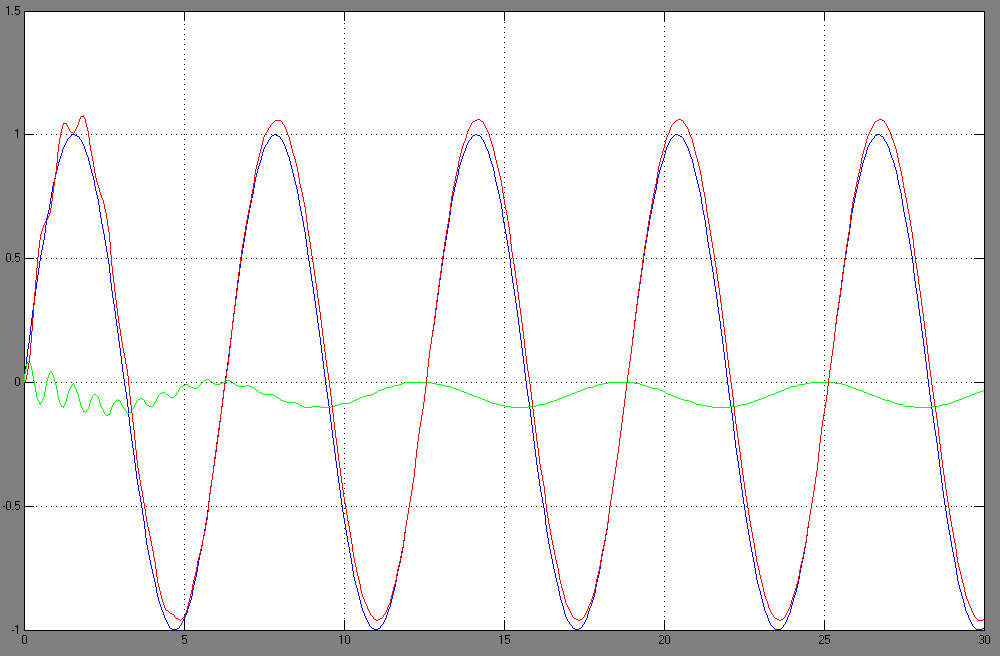
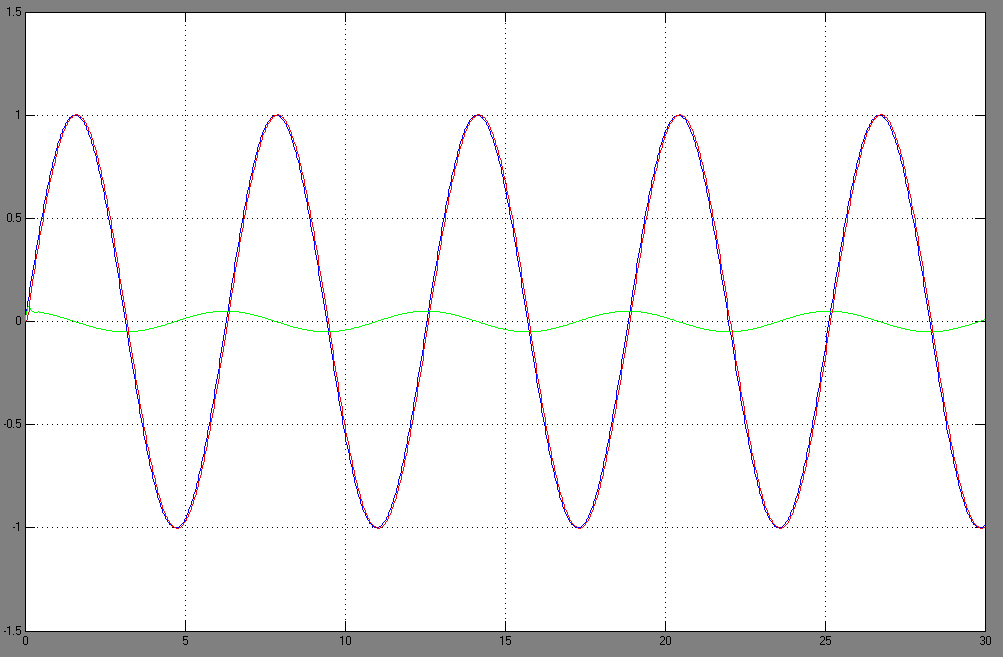
г) при подаче на вход гармонического сигнала:
Вывод: Введение
интегралов является методом создания
или повышения порядка астатизма системы,
а значит должно обеспечивать повышение
точности в установившемся режиме. В
частности, такой регулятор, введенный
в исходную астатическую СС, поднимает
ее порядок астатизма до второго. Это
позволяет без ошибки отрабатывать
равномерный входной сигнал; с постоянной
ошибкой отрабатывается равноускоренный
сигнал. Причем, поскольку астатизм
вводится в регулятор (т.е. до точки
приложения возмущающего момента
![]() ),
то это позволяет устранить установившуюся
ошибку слежения исходной системы,
обусловленную этим моментом. Однако,
надо иметь в виду, что введение интегратора
в регулятор является дестабилизирующим
фактором, уменьшающим запасы устойчивости
системы.
),
то это позволяет устранить установившуюся
ошибку слежения исходной системы,
обусловленную этим моментом. Однако,
надо иметь в виду, что введение интегратора
в регулятор является дестабилизирующим
фактором, уменьшающим запасы устойчивости
системы.
Введение производных, напротив, является стабилизирующим фактором, увеличивающим запасы устойчивости системы и повышающим качество переходного процесса за счет усиления затухания (демпфирования). При управлении по производной показатели точности системы не могут быть улучшены, т. к. установившиеся значения ошибки остаются такими же, как и в системе без дифференцирующего регулятора. Однако регулирование по производной имеет большое значение в качестве вспомогательного средства, т. к. оно учитывает не только наличие ошибки, но и тенденцию к ее росту или уменьшению.