Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
Тульский государственный университет
Кафедра “Системы автоматического управления”
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Отчёт по лабораторным работам
Выполнила: студент гр. 020182
Карташов М.С.
Проверила: Пестрякова Н.С.
Тула, 2011г.
Содержание
Лабораторная работа № 1. Анализ линейной следящей системы автоматического управления с пропорциональным управлением.
1. ЦЕЛИ И ЗАДАЧИ ИССЛЕДОВАНИЯ.
Цель исследования – практическое изучение динамических возможностей линейной следящей системы (СС) с п ропорциональным управлением; анализ влияния дополнительных обратных связей на динамику и точность СС.
Достижение поставленной цели связано с необходимостью решения следующих задач:
– оценки устойчивости СС;
– оценки точности слежения в установившемся режиме;
– оценки качества регулирования в переходном режиме.
2. ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ.
2.1. Определение показателей точности и устойчивости СС.
Рассмотрим СС базе электрических машин постоянного тока, принципиальная схема которой представлена на рис.1.

Рис. 1. Принципиальная схема следящей системы: СД – сельсин-датчик; СП – сельсин-приемник; ЭУ – электронный усилитель; ЭМУ – электромашинный усилитель; Д – двигатель; Р – редуктор.
Здесь обозначено:
![]() – угол поворота входного вала, угол
поворота выходного вала, момент сил
сопротивления, момент инерции нагрузки
соответственно.
– угол поворота входного вала, угол
поворота выходного вала, момент сил
сопротивления, момент инерции нагрузки
соответственно.
Математическому описанию функционирования данной следящей системы с помощью линейных дифференциальных уравнений соответствуют следующие структурная схема (рис.2) и схема моделирования в пакете Simulink (рис 3).
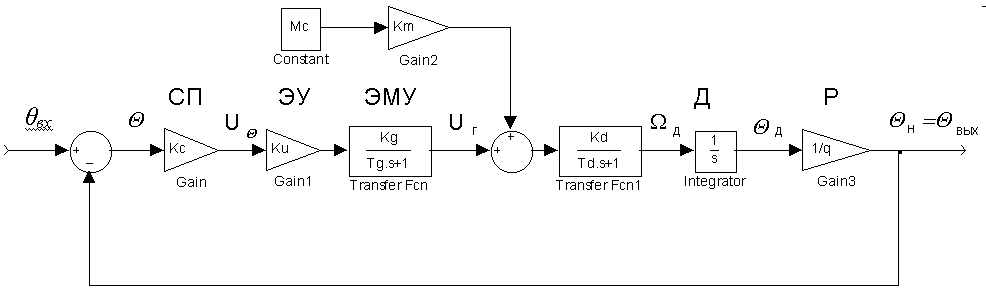
Рис. 2. Структурная схема следящей системы.
Здесь обозначено:
![]() – ошибка рассогласования;
– ошибка рассогласования;
![]() ,
,![]() ,
,![]() ,
,![]() – коэффициенты передачи сельсинной
пары, ЭУ, ЭМУ, Д соответственно;
– коэффициенты передачи сельсинной
пары, ЭУ, ЭМУ, Д соответственно;
![]() –
передаточное отношение редуктора;
–
передаточное отношение редуктора;
![]() - постоянные времени ЭМУ и Д соответственно.
- постоянные времени ЭМУ и Д соответственно.
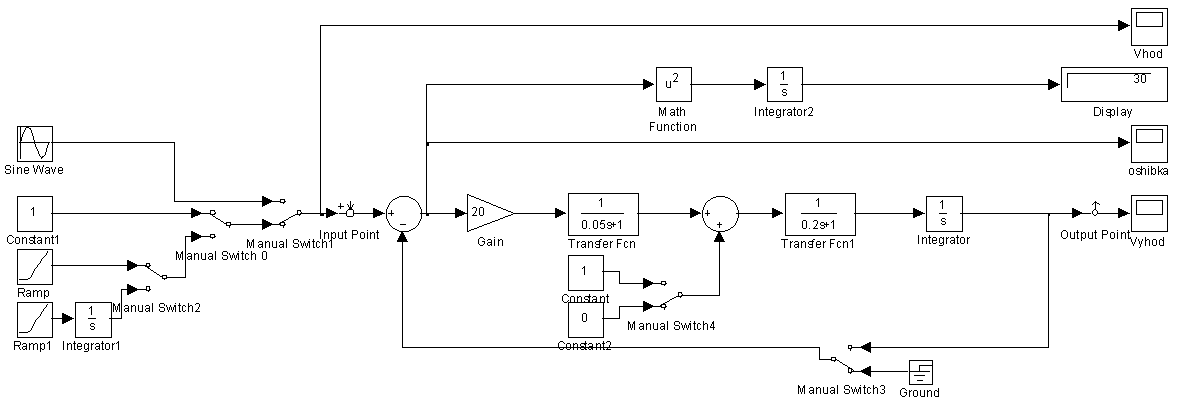
Рис. 3. Схема моделирования СС.
При выполнении заданий
приняты следующие значения параметров:
коэффициент по контуру (добротность
системы по скорости)
![]() ;
постоянные времени:
;
постоянные времени:
![]() ;
;
![]() ;
возмущающий момент
;
возмущающий момент
![]() .
.
1. На основе исходных данных, используя алгебраический критерий, определить устойчивость заданной системы.
Передаточная
функция замкнутой системы при
![]() (главная ПФ) имеет следующий вид:
(главная ПФ) имеет следующий вид:
 (1)
(1)
В соответствии с (1) имеем следующее характеристическое уравнение замкнутой системы:
![]() (2)
(2)
Алгебраический критерий Рауса-Гурвица позволяет, не прибегая к расчету корней уравнения (2), определить устойчивость СС и получить в общем виде соотношение между параметрами системы (постоянными времени, добротностью) при котором процессы в ней будут устойчивыми.
В рассматриваемом случае системы третьего порядка этот критерий формирует необходимые и достаточные условия устойчивости в виде положительности коэффициентов уравнения (2), а также неравенства, связывающего внутренние и внешние коэффициенты этого уравнения:
![]() или
или
 (20<25)
(20<25)
Исходя из заданных значений исходных данных, можно сделать вывод о положительности коэффициентов уравнения (2). Следовательно, согласно критерию Рауса-Гурвица, заданная система является устойчивой.
Из написанного выше неравенства следует, что для увеличения запасов устойчивости СС (или для увеличения добротности при сохранении тех же запасов) нужно стремиться к уменьшению постоянных времени .
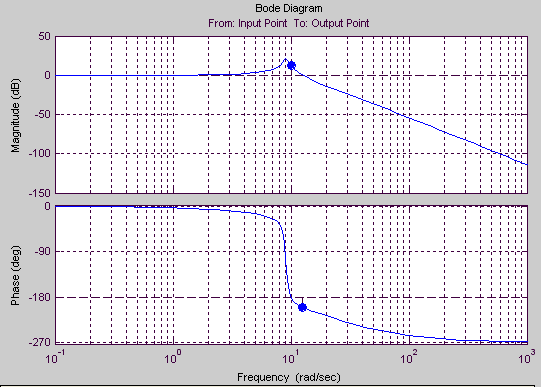
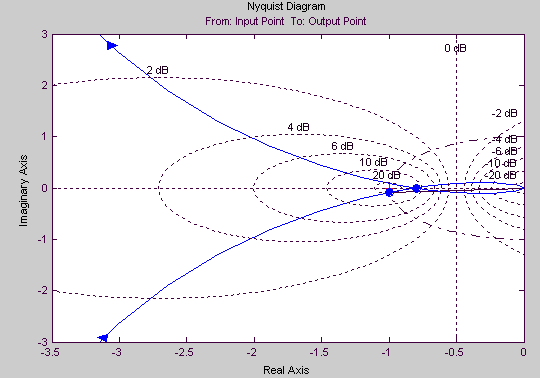
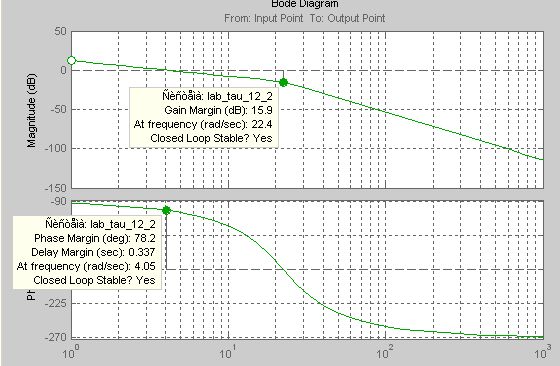
2. Построим логарифмические частотные характеристики и годограф Найквиста, с использованием пакета Control ToolBox:
Логарифмические амплитудно- и фазочастотные характеристики, построенные с помощью пакета Control ToolBox, будут иметь следующий вид:
Годограф Найквиста данной системы будет иметь следующий вид:
3. Точность отработки СС типовых входных сигналов определяется величиной установившейся ошибки. Определим ее в общем виде с помощью метода коэффициентов ошибок.
Разложим ПФ (3) для ошибки исходной системы в степенной ряд путем деления числителя на знаменатель:
 (3)
(3)
Ограничимся первыми двумя членами ряда. Тогда получаем, что
![]() ;
;
![]() ;
;
![]() .
.
Таким образом, для расчета установившейся ошибки слежения получаем следующую приближенную формулу:
![]() (4)
(4)
Подставляя в зависимость (4) выражение для исследуемого типа входного сигнала, оцениваем значение установившейся ошибки:
а) единичный
ступенчатый входной сигнал
![]()
![]()
б) равномерный
входной сигнал
![]() ,
,
![]()
![]()
в) равноускоренный
входной сигнал
![]() ,
,
![]()
![]()
г) синусоидальный
входной сигнал
![]()
![]()
4) Проверим полученные
результаты с помощью пакета Simulink.
Оценим установившуюся ошибку отработки
СС типовых входных сигналов путем
моделирования работы системы (при
отсутствии возмущающего момента
![]() ).
Определим составляющую ошибки слежения,
обусловленную возмущающим моментом
).
Определим составляющую ошибки слежения,
обусловленную возмущающим моментом
![]() при ступенчатом входном воздействии.
при ступенчатом входном воздействии.
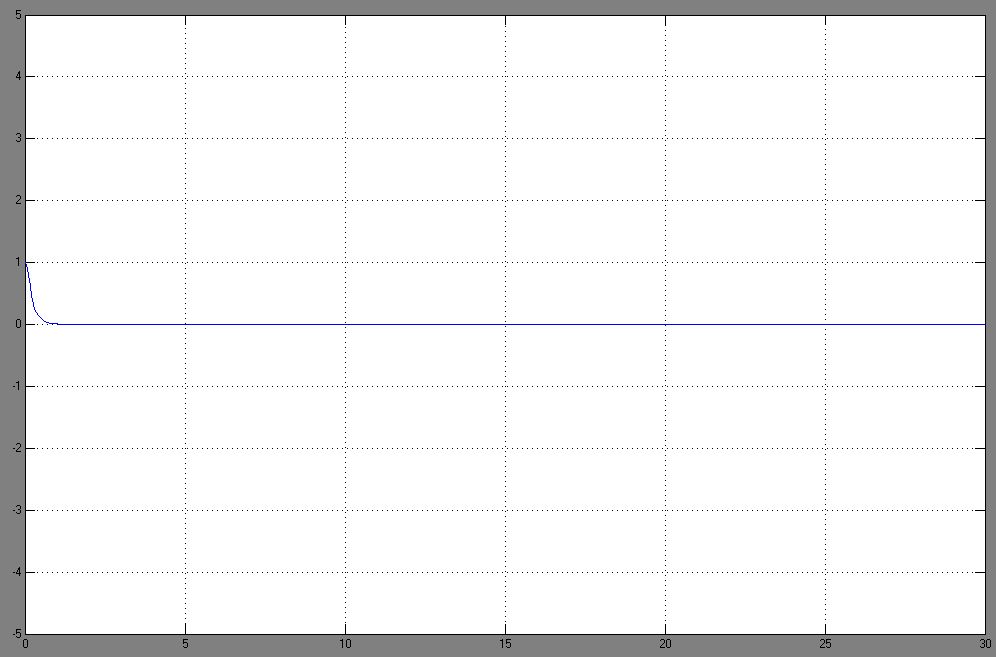
а) при подаче на вход системы единичного ступенчатого сигнала ошибка имеет следующий вид:
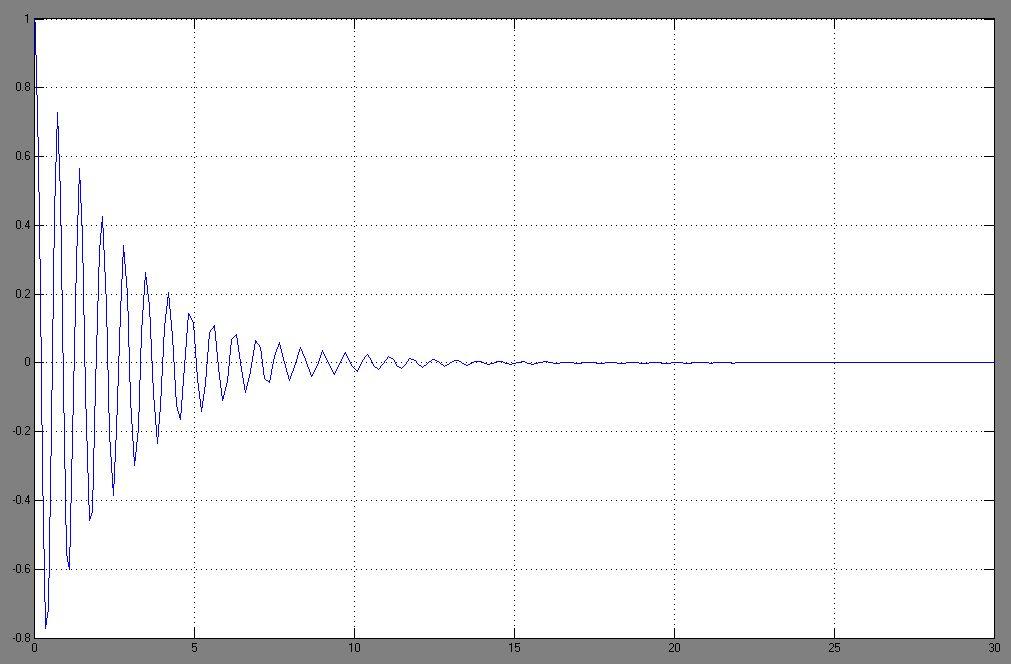
Таким образом получаем, что установившаяся ошибка для данного случая равна 0.
б) при подаче на вход равномерного входного сигнала получим:
Следовательно при
подаче на вход равномерного входного
сигнала, установившееся значение ошибки
равно const,
а именно
![]() .
.
в) при подаче на вход равноускоренного входного сигнала получим:
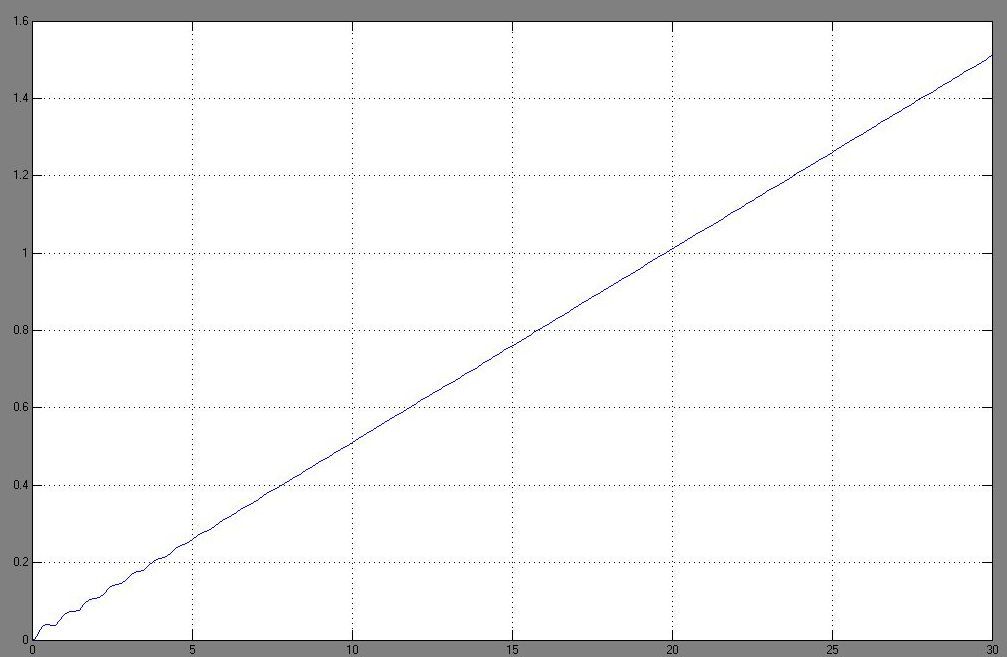
В данном случае ошибка представляет собой линейно-нарастающую функцию времени.
г) при подаче на вход синусоидального сигнала получим:
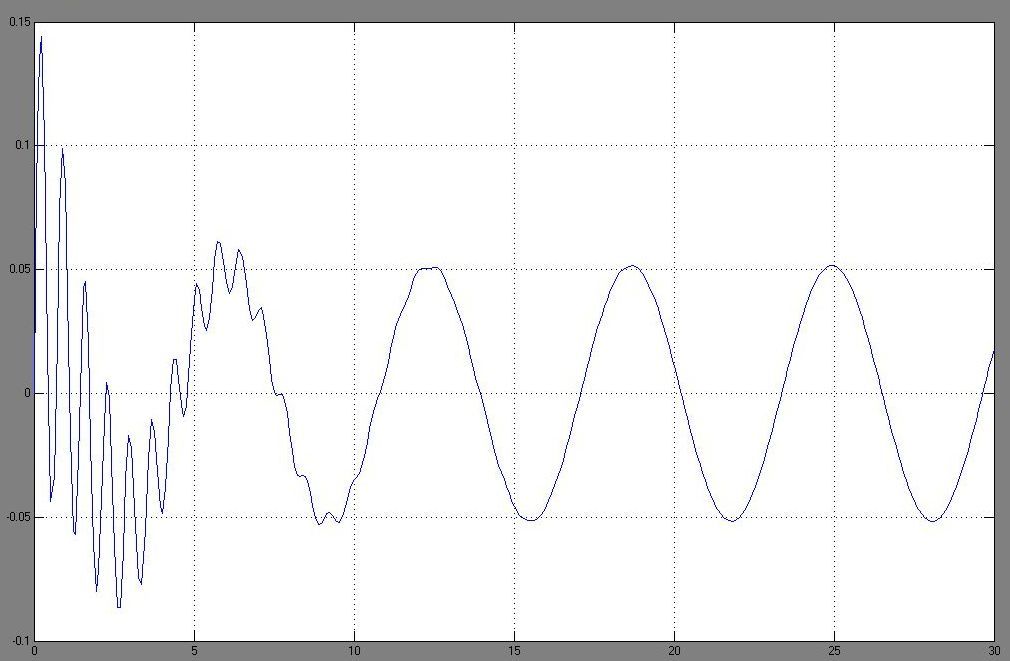
Следовательно, при подаче на вход синусоидального сигнала, установившаяся ошибка также представляет собой гармоническую функцию времени.
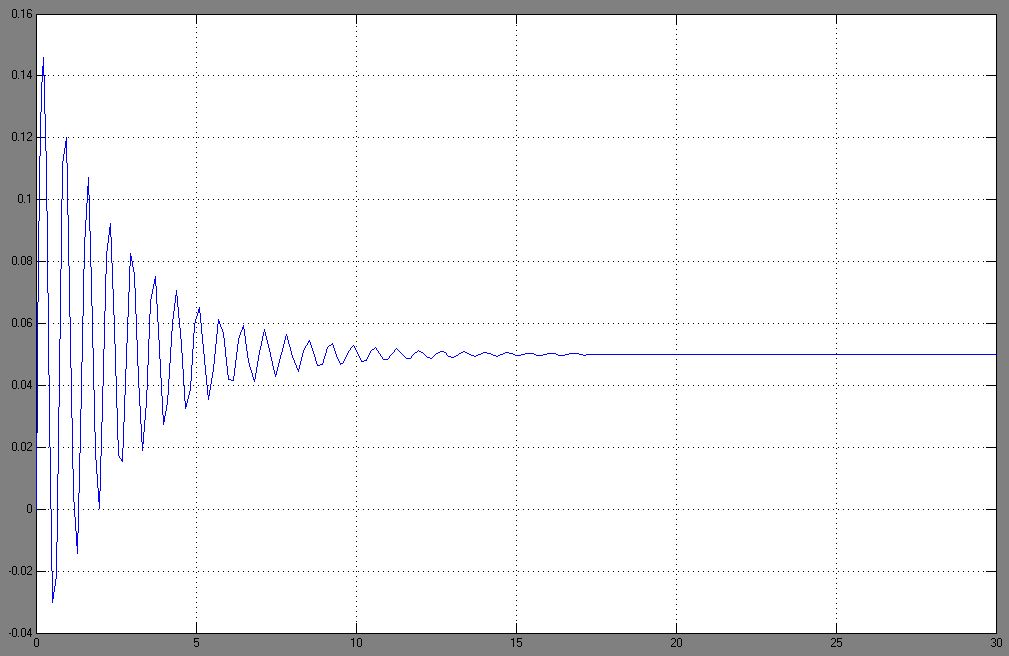
При подаче на вход единичного ступенчатого сигнала и наличии возмущающего воздействия получим следующий вид установившейся ошибки.

Численно эта ошибка
равна
![]() .
.
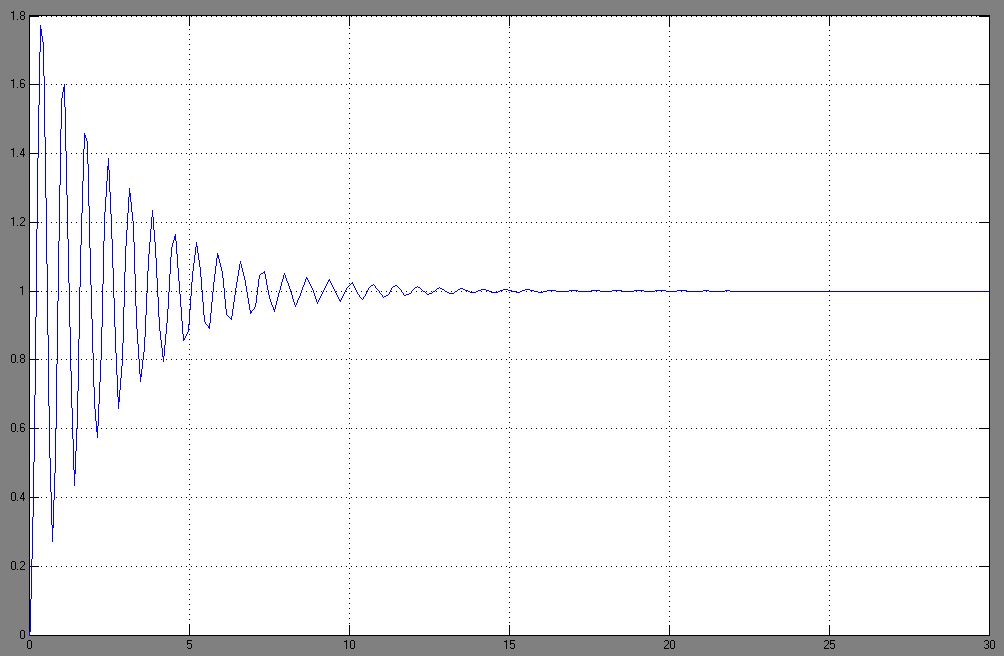
5) Оценим качество
переходного процесса в системе при
ступенчатом входном сигнале
.
Определим время регулирования и
перерегулирование путем моделирования
работы системы. Получим косвенную оценку
качества переходного процесса с помощью
интегрального квадратичного критерия
![]() .
.
Время регулирования равно 6,5 секунды, перерегулирование 78%, интегральный квадратный критерий равен 0,6453.
Оценим те же параметры при наличие возмущающего воздействия
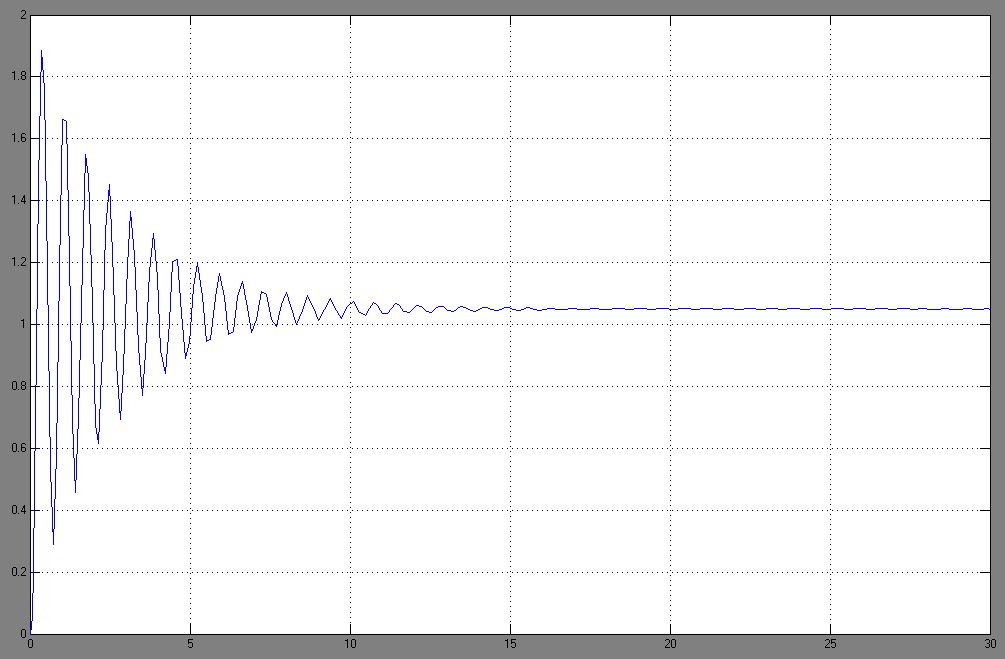
Время регулирования равно 7 секунд, перерегулирование 88,6%, интегральный квадратный критерий равен 0,7792.
6) Проанализируем различные варианты коррекции исходной системы: с помощью введения дополнительных ООС по скорости и ускорению выходного вала.
6А) Исследуем систему с обратной связью по скорости.
Логарифмические амплитудно- и фазочастотные характеристики, построенные с помощью пакета Control ToolBox, будут иметь следующий вид:
1) при подаче на вход системы единичного ступенчатого сигнала ошибка имеет следующий вид: