

3.5 Задание д-5. Общее уравнение динамики
3.5.1 Применение принципа Даламбера – Лагранжа
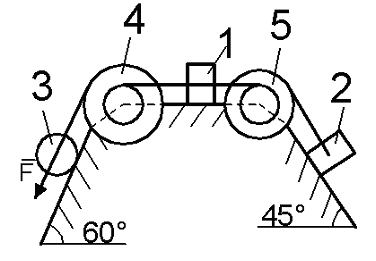
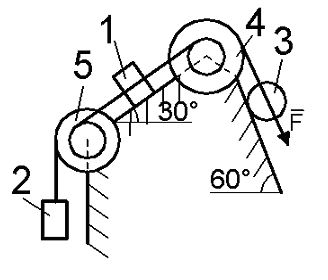
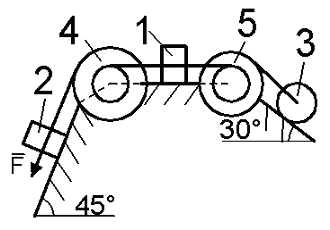
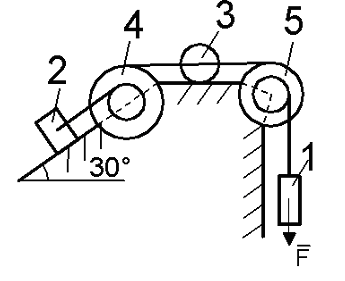
Механическая
система состоит из ступенчатых шкивов
4
и 5
весом Р4
и Р5
с радиусом ступеней R4=R,
r4=0,5R,
R5=0,8R,
r5=0,4R
(массу каждого шкива считать равномерно
распределенной по его внешнему ободу),
грузов 1
и 2
и сплошного однородного цилиндра катка
3, весом Р1,
Р2,
Р3
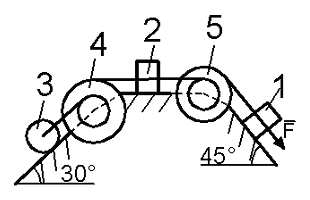
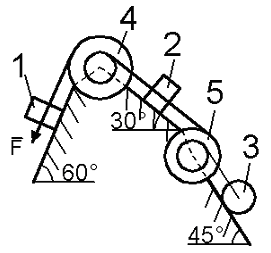
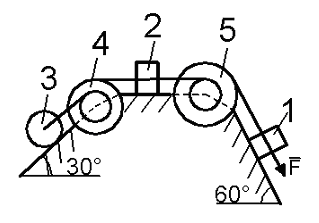
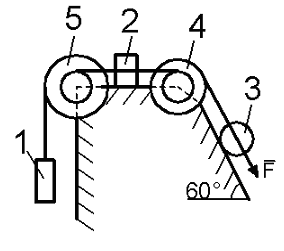
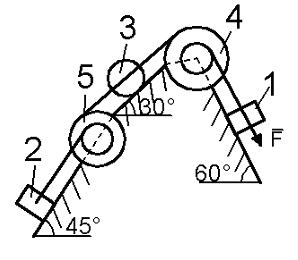
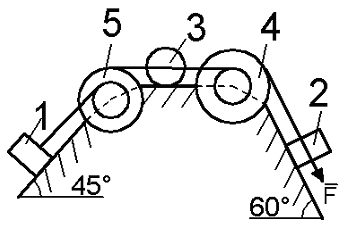
(рис. 3.97-3.126). Тела системы соединены
нитями, намотанными на шкивы; участки
нитей параллельны соответствующим
плоскостям. Система движется в вертикальной
плоскости под действием силы тяжести
и постоянной силы
![]() Коэффициент трения скольжения грузов
о плоскость f
= 0,1, катки
катятся без
проскальзывания, трением качения
пренебречь. Определить ускорение груза,
имеющего больший вес. Сила
F,
и вес всех тел заданы в ньютонах (табл.11).
Коэффициент трения скольжения грузов
о плоскость f
= 0,1, катки
катятся без
проскальзывания, трением качения
пренебречь. Определить ускорение груза,
имеющего больший вес. Сила
F,
и вес всех тел заданы в ньютонах (табл.11).
Таблица 10
Данные к заданиям Д-5, Д-6
Вариант |
Р1 |
Р2 |
Р3 |
Р4 |
Р5 |
F |
0 |
3Р |
4Р |
2Р |
3Р |
2Р |
18Р |
1 |
4Р |
2Р |
2Р |
Р |
2Р |
16Р |
2 |
6Р |
5Р |
4Р |
2Р |
Р |
30Р |
3 |
3Р |
3Р |
Р |
2Р |
Р |
15Р |
4 |
3Р |
4Р |
2Р |
3Р |
2Р |
16Р |
5 |
2Р |
3Р |
Р |
2Р |
3Р |
15Р |
6 |
8Р |
6Р |
4Р |
3Р |
2Р |
40Р |
7 |
5Р |
Р |
2Р |
Р |
3Р |
28Р |
8 |
3Р |
Р |
Р |
2Р |
3Р |
15Р |
9 |
2Р |
3Р |
Р |
Р |
2Р |
17Р |
|
|
Рис. 3.97 |
Рис. 3.98 |
|
|
Рис. 3.99 |
Рис. 3.100 |
|
|
Рис. 3.101 |
Рис. 3.102 |
|
|
Рис. 3.103 |
Рис. 3.104 |
|
|
Рис. 3.105 |
Рис. 3.106 |
|
|
Рис. 3.107 |
Рис. 3.108 |
|
|
Рис. 3.109 |
Рис. 3.110 |
|
|
Рис. 3.111 |
Рис. 3.112 |
|
|
Рис. 3.113 |
Рис. 3.114 |
Рис. 3.115 |
Рис. 3.116 |
|
|
Рис. 3.117 |
Рис. 3.118 |
|
|
Рис. 3.119 |
Рис. 3.120 |
|
|
Рис. 3.121 |
Рис. 3.122 |
|
|
Рис. 3.123 |
Рис. 3.124 |
|
|
Рис. 3.125 |
Рис. 3.126 |





3.5.2 Указания по выполнению задания д-5
[Один из общих принципов механики, называемый принципом Даламбера – Лагранжа, формулируется так: движение механической системы с идеальными связями под действием приложенных к ней активных сил происходит так, что в каждый момент времени сумма элементарных работ этих активных сил и сил инерции на любом возможном перемещении системы из рассматриваемого положения равна нулю.
Уравнение, дающее математическое выражение принципа Даламбера –Лагранжа, называется общим уравнением динамики:
![]() . (3.46)
. (3.46)
Преимущество общего уравнения динамики состоит в том, что в его формулировке отсутствуют силы реакций идеальных связей. Если не все связи идеальные, следует к активным силам добавить силы реакций, соответствующие неидеальным связям, например силы трения.
При решении задач с помощью общего уравнения динамики для выбранной механической системы с одной степенью свободы рекомендуется придерживаться следующей последовательности:
1) показать на рисунке активные силы и силы реакций, соответствующие неидеальным связям;
2) приложить к телам системы силы инерции;
3) дать возможное перемещение одной из точек системы и выразить возможные перемещения точек приложения всех сил через это перемещение;
4) вычислить сумму возможных работ всех сил, указанных в первых двух пунктах, и составить общее уравнение динамики;
5) найти искомую величину, решив составленное уравнение.