

2. Расчет статических и динамических характеристик для разомкнутой системы регулируемого электропривода
2.1 Проверка обеспечения заданной области существования
электромеханических характеристик электропривода
Определяем значение минимального угла управления в выпрямительном режиме (при этом угле электромеханическая характеристика силовой части электропривода будет проходить через точку =max и I=Imax)
![]() ,
,
где значение
ЭДС преобразователя при угле управления
![]()
![]() В.
В.
Тогда
![]() .
.
При
выбранном значении
![]() рассчитывается электромеханическая
характеристика при работе тиристорной
группы в выпрямительном режиме
рассчитывается электромеханическая
характеристика при работе тиристорной
группы в выпрямительном режиме
![]() .
.
Электромеханическая характеристика имеет вид прямой линии, поэтому для её построения достаточно найти две точки, например при Idв = 0 и Idв = Iмакс =240 А.
![]() рад/с;
рад/с;
![]() рад/с.
рад/с.
Для группы вентилей, работающей в режиме предельного инвертирования, электромеханическая характеристика записывается следующим образом:
![]() ,
,
где
![]() - угол запаса при инвертировании;
- угол запаса при инвертировании;
![]() –
угол, соответствующий времени
полного восстановления запирающих
свойств тиристора после выключения,
град;
–
угол, соответствующий времени
полного восстановления запирающих
свойств тиристора после выключения,
град;
![]() – время выключения тиристора ([4] табл.
11.7), с;
– время выключения тиристора ([4] табл.
11.7), с;
Для тиристора Т -100 tв=70 мкс [4].
![]() о;
о;
![]() –
максимальное значение асимметрии
импульсов управления, практически [1].
–
максимальное значение асимметрии
импульсов управления, практически [1].
Принимаем
![]() ,
тогда
,
тогда
![]() о;
о;
В режиме предельного инвертирования значение тока берем отрицательным, так как при инвертировании (тормозной режим) направление тока будет противоположное направлению тока в двигательном режиме.
Аналогично выпрямленному режиму находим две точки характеристики предельного инвертирования:
![]() рад/с;
рад/с;
![]()
Электромеханические характеристики для режима предельного инвертирования и выпрямления с минимальным углом управления изображены на рис. 6.
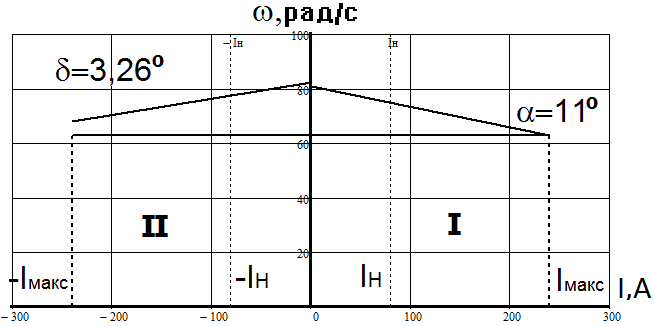
Рисунок 6. Область существования электромеханических характеристик
выпрямительный режим;
инверторный режим.
2.2 Расчет естественных характеристик ω=f(I), регулируемого
электропривода и расчет зоны прерывистых токов
Режим непрерывного тока(РНТ)
E2=U2лн=230 В– для трехфазных мостовых схем выпрямления;
Скорость вращения вала электродвигателя:
![]() ;
;
где
![]() –
среднее значение выпрямленной ЭДС в
режиме непрерывного тока;
–
среднее значение выпрямленной ЭДС в
режиме непрерывного тока;
– угол включения тиристора, отсчитываемый от точки естественной коммутации;
Uв = 1,85В – прямое падение напряжения на тиристоре.
Рассчитываем значение угла для обеспечения скоростей
= н; 0,8н; 0,6н; 0,4н; 0,2н.
Произведя ряд преобразований над (20) получим:
![]() .
.
![]() .
.
Аналогичным образом рассчитываются остальные углы управления.
Данные результатов расчётов углов управления сведены в табл. 10.
Таблица 10
, с-1 |
-н |
- 0,8н |
- 0,6н |
- 0,4н |
- 0,2н |
0,2н |
0,4н |
0,6н |
0,8н |
н |
o, град |
125,4 |
116,8 |
108,7 |
101 |
93,5 |
78,6 |
70,7 |
70,9 |
62,9 |
44 |
Найдём значение скорости для каждого угла из табл. 10 при токах
Id = (0,5;1,0; 1,5)Iн. ; =44о:
![]() рад/с;
рад/с;
![]() рад/с.
рад/с.
![]() рад/с.
рад/с.
Значения скорости н при различных значениях угла управления и тока Id приведены в табл. 11.
Таблица 11
Id, A |
=44 |
=54,1 |
=62,9 |
=71 |
=78,6 |
=93,5 |
=101 |
=108,7 |
=117 |
=125,4 |
|
60 |
49 |
38,1 |
27,1 |
16,2 |
-5,7 |
-16,7 |
-27,7 |
-38,6 |
-49,6 |
|
57 |
46,1 |
35,1 |
24,1 |
13,2 |
-8,7 |
-19,7 |
-30,7 |
-41,6 |
-52,6 |
|
54 |
43,1 |
32,1 |
21,1 |
10,2 |
-11,7 |
-22,7 |
-33,7 |
-44,6 |
-55,6 |
Режим прерывистых токов(РПТ)
Расчёт производим для одного угла =440:
 ,
,
где
![]() –
угол открывания, измеренный от начала
положительной полуволны синусоиды
фазной ЭДС [1];
–
угол открывания, измеренный от начала
положительной полуволны синусоиды
фазной ЭДС [1];
Определяем предельное значение скорости идеального холостого хода РПТ:
![]() ;
(а)
;
(а)
 .
(б)
.
(б)
При угле открывания
вентиля
![]() используем для расчёта формулу (а) [1],
а если
используем для расчёта формулу (а) [1],
а если
![]() ,
то используем для расчёта выражение
(б).
,
то используем для расчёта выражение
(б).
Тогда
![]() рад/c.
рад/c.
В
режиме идеального холостого хода (Iср=0)
ЭДС Ed
и напряжение Ud
выпрямителя, и скорость холостого хода
![]() достигают своих максимальных значений:
достигают своих максимальных значений:

Так как в цепи якоря присутствует индуктивность Lяц и Rяц , то ток якоря отстаёт от напряжения на угол
![]() о.
о.
Определим граничное значение ЭДС в относительных единицах:
 ;
;
 .
.
Определим граничное значение тока в относительных единицах

Границы характеристики режима прерывистого тока
![]() рад/c.
рад/c.
 А.
А.
Текущее значение скорости и тока при изменении длительности тока принимаем
от
> 0 до
= 30о
=![]() .
.
Принимаем
= 20о,
![]() тогда
тогда
![]()
 .
.
Определим среднее значение тока и скорости в зоне прерывистых токов:

 А;
А;
![]() рад/с.
рад/с.
Дальнейшие расчеты проведем с помощью программы Mathcad.
По рассчитанным данным строятся естественные характеристики, показанные на рис. 7.

Рисунок 7. Электромеханические характеристики в зоне прерывистых
и непрерывных токов
2.3 Расчет искусственных (регулировочных) характеристик ω=f(I),
ω=f(M) системы регулируемого электропривода для заданного диапазона
регулирования скорости
В общем случае расчет ведется следующим
образом. Для точек
![]() в зоне прерывистого тока (РПТ)
в зоне прерывистого тока (РПТ)
![]() <
<
![]() <
<
![]() определяются значения средневыпрямленного
тока
определяются значения средневыпрямленного
тока
![]() и угла управления
и угла управления
![]() и рассчитывается значения
и рассчитывается значения
![]() .
.
![]()
В режиме непрерывного тока (РНТ), где Id ≥I гр расчет упрощается
![]() .
.
Рассчитанные значения сведены в табл. 7, по которым на рис. 8
построена регулировочная характеристика одного комплекта вентилей.
Таблица 7
, град |
11 |
20 |
35 |
50 |
75 |
90 |
95 |
115 |
130 |
150 |
Евп., В |
1304,8 |
281,2 |
237,7 |
178 |
106,1 |
0 |
-27 |
-131,2 |
-199,6 |
-268,9 |
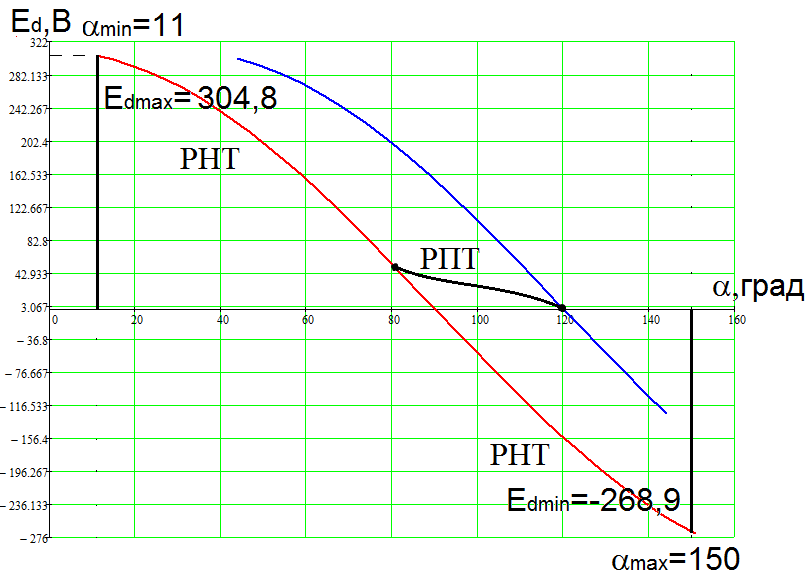
Рисунок 8. Регулировочные характеристики реверсивного тиристорного преобразователя
2.4 Расчет электромеханических переходных процессов ω=f(t), M=f(t)
при пуске, набросе и сбросе нагрузки при мгновенном изменении задания
Пуск
Rя∑=0.24
Ом;
![]() с;
с;
Мнач=0; Мкон.фикт=Мc=338 Н·м.
ωнач=0;
![]() рад/с.
рад/с.
Полученные значения начальных, конечных значений момента и скорости подставляем в выражения для расчета переходных процессов.
![]()
![]()
Полученные расчетные значения заносим в табл. 8.
Таблица 8
-
t, с
0
0.04
0.08
0.1
М, Н·м
0
275
326,6
338,5
ω, рад/с
0
49,4
58,7
60,8
n, об/мин
0
471,8
560,6
580,6
По данным табл.8 строим графики переходных процессов М=f(t) и ω =f(t)
для режима пуска(см. рис.9).
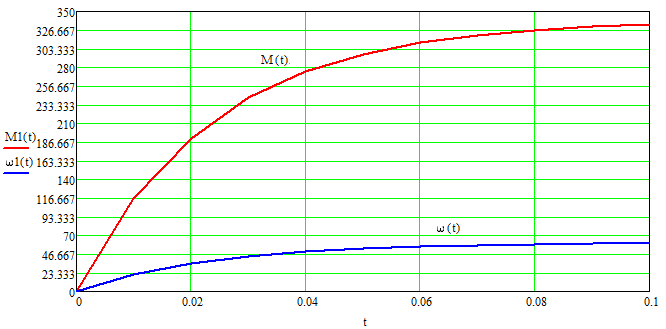
Рисунок. 9. График переходных процессов М,ω=f(t) для пусковой характеристики (t пп = 0.1 с).
Наброс нагрузки
Rя∑=0.24 Ом; с;
Мнач=338,5; Мкон.фикт=Мн=350,2 Н·м.
ωнач=60,8;
![]() рад/с.
рад/с.
Полученные значения начальных, конечных значений момента и скорости подставляем в выражения для расчета переходных процессов.
![]()
![]()
Полученные расчетные значения заносим в табл. 9.
Таблица 9
-
t, с
0
0.04
0.08
0.1
М, Н·м
338,5
348
349,8
350,2
ω, рад/с
60,8
60,6
60,55
60,5
n, об/мин
580,6
578,7
580,3
578,8
По данным табл.9 строим графики переходных процессов М=f(t) и ω =f(t)
для режима пуска(см. рис.10).
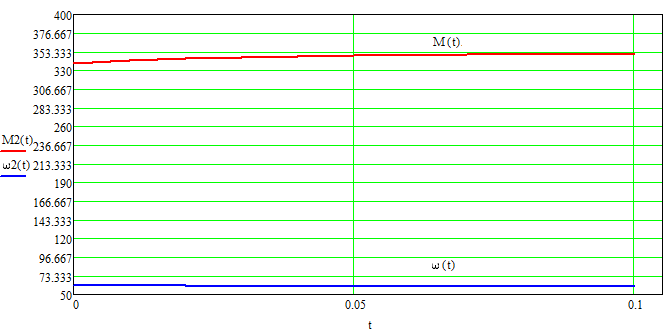 Рисунок.
10. График переходных процессов М,ω=f(t)
для характеристики наброса нагрузки
(t
пп
=
0.1 с).
Рисунок.
10. График переходных процессов М,ω=f(t)
для характеристики наброса нагрузки
(t
пп
=
0.1 с).
Сброс нагрузки
Rя∑=0.24 Ом; с;
Мнач=350,2 Н·м; Мкон.фикт=Мс=338,5 Н·м.
ωнач=60,5 Рад/с; рад/с.
Полученные значения начальных, конечных значений момента и скорости подставляем в выражения для расчета переходных процессов.
![]()
Полученные расчетные значения заносим в табл. 10.
Таблица 10
-
t, с
0
0.04
0.08
0.1
М, Н·м
350,2
340,7
338,9
338,5
ω, рад/с
60,5
60,76
60,79
60,8
n, об/мин
0
580,3
580,5
580,6
По данным табл.10 строим графики переходных процессов М=f(t) и ω =f(t)
для режима пуска(см. рис.11).
 Рисунок.
11. График переходных процессов М,ω=f(t)
для характеристики сброса нагрузки (t
пп
=
0.1 с).
Рисунок.
11. График переходных процессов М,ω=f(t)
для характеристики сброса нагрузки (t
пп
=
0.1 с).
Переходные процессы для режима динамического торможения
![]() Ом;
Ом;
![]() с;
с;
Мнач=-338,5 Н·м; Мкон=350,2 Н·м. (момент берется в качестве номинального значения, на которую двигатель разгонится до номинальной скорости, если бы была активная нагрузка)
При расчете переходного процесса М=f(t) для режима динамического торможения в качестве конечного значения момента берется величина Мкон, а расчет ведется до значения момента, равному М =0 Н·м.
ωнач=60,8
![]() рад/с,
рад/с,
а
расчет ведется до значения, равному
![]()
Полученные значения начальных, конечных значений момента и скорости подставляем в выражения для расчета переходных процессов
![]()
![]()
Полученные расчетные значения заносим в табл.11.
Таблица 11
-
t, с
0
0.24
0,48
0,72
М, Н·м
-338,5
-91,4
-24,7
0
ω, рад/с
60,8
16,4
4,4
0
n, об/мин
580,6
156,6
42
0
По данным табл.11 строим графики переходных процессов М,ω=f(t) для режима пуска на первой ступени (см. рис.14).

Рисунок 12. График переходных процессов М,ω=f(t) в режиме динамического торможения (t=0,72c)
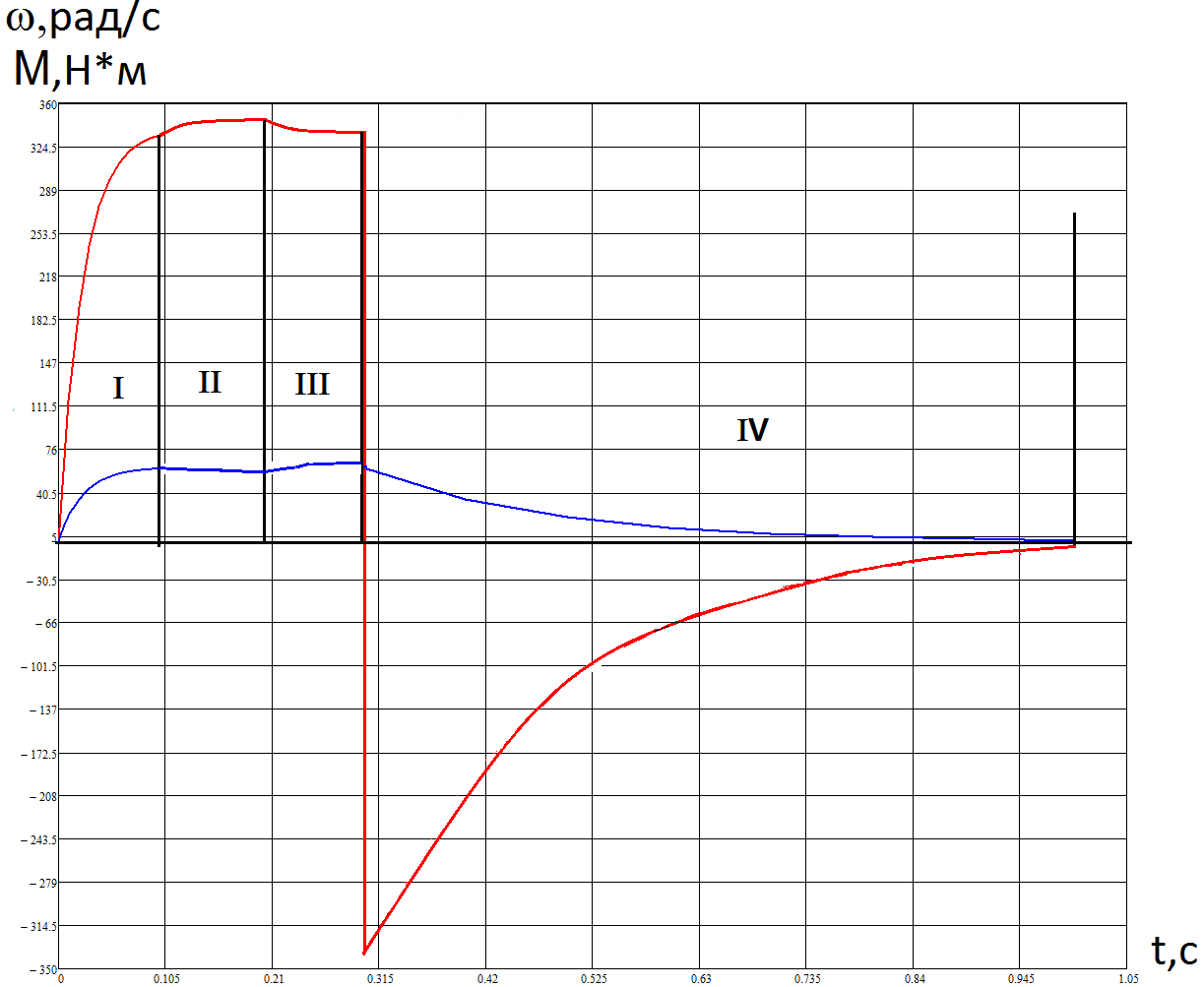
Рисунок 12. Графики переходных процессов M=f(t) и ω= f(t) заданного цикла работы. I – пуск двигателя; II – наброс нагрузки; III – сброс нагрузки; IV – динамическое торможение.