

Министерство общего и профекиовиьаого обраэовавт
ЧепбшккмЙ государственный технический университет
Кафедра элеюропривода ■ автоматики промышленных установок и ткпюаогичееюга номшнкеов
681^(07) Г245
Р.Х. Гтфяятумнм , B.r.Majpep , В.П.Мацин ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Учеб», пособие
Чыабшкк
Изоатсльство ЧГТУ 1997
УДК 681.51 (075.8) +681.511.2(075.8)
Гафиятуяпин РХ, Маурер ВГ., Мацин В.П. Теория автоматического управления: Учебное пособие. — Челябинск : ЧГТУ, 1997. — 56с.
Учебное пособие является руководством к выполнению лабораторно-практических занятий по курсу " Теория автоматического управления" (нелинейные системы) для студентов специальности 1804 и включает в себя задания на выполнение и методические указания.
Ил. 20, табл. 1, список лит.— 4 назв.
Одобрено учебно-методической комиссией энергетического факультета.
Рецензенты: Абрамов ГЛ., Петршмв БА.
ШЗН 5-696-00909-3 & ИЗДАТЕЛЬСТВО ЧГГУ, ,997.
Глава 1. Дискретные системы автоматического регулирования
РАБОТА 1. СИСТЕМА С ИМПУЛЬСНЫМ ЭЛЕМЕНТОМ
1. Цель работы
Научиться оценивать устойчивость, предельную частоту среза и показатели переходного процесса при ступенчатом входном водейстьии замкнутой системы
2. Программа работы
1. По заданным параметрам своего варианта (рис. 1.1.1 , D|=0) построить аппроксимированные ЛАЧХ эквивалентной разомкнутой и замкнутой непрерывной системы с учетом скважности импульсов. Оценить устойчивость системы.
2. Сравнить основные показатели переходных процессов , построенных по виду аппроксимированных ЛАЧХ и определенных экспериментально для замкнутой импульсной системы.
3. Определить предельное значение периода следования импульсов , выше которой замкнутая импульсная система становится неустойчивой н сопоставить найденное значение с экспериментальным,
4. Выводы.
3. Методические указания
Наличие в замкнутом контуре регулирования (рис. 1.1.2л) импульсного элемента, преобразующего непрерывный сигнал на его входе в серию равноотстоящих друг от друга импульсов на выходе , придает системе свойства, качественно отличие от свойств непрерывных систем. Дело в том , что передача информации через импульсный элемент происходит лишь в моменты появления импульсов. в промежутках между импульсами она отсутствует . Особенно ощутима потеря информации , когда период следования импульсов Ти достаточно велик и соизмерим со временем протекания переходных процессов в элементах непрерывной части системы . При этом замкнутая импульсная система может оказаться неустойчивой даже в том случае , когда непрерывная часть представлена одним интегрирующим звеном.
3
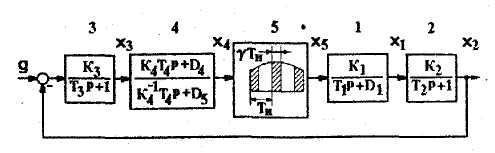
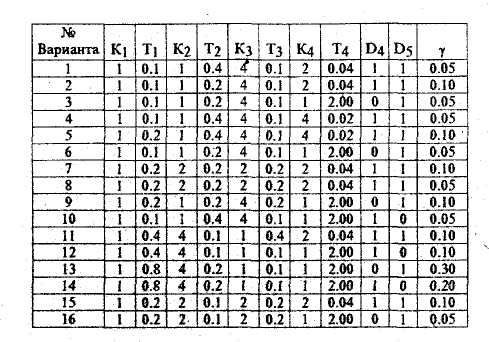
Рис. 1.1.1. Структурная схема и параметры системы к работе 1
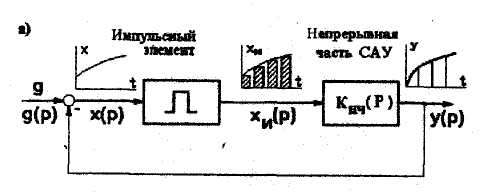
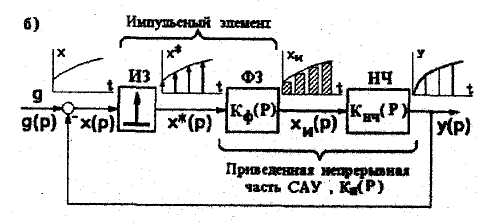
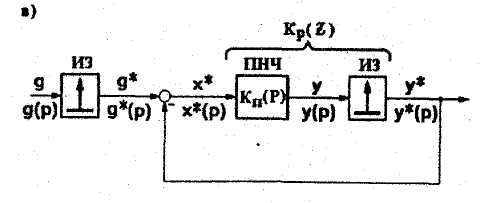
Рис. 1.1 Л. Структурные схемы САУ с импульсным элементом
При математическом описании импульсных САУ реальный импульсный элемент (ИЭ) при амплитудно-импульсной модуляции заменяют последовательным соединением двух звеньев (рис. 1.1.2.6): идеального импульсного звена (ИЗ), имеющего модулированные единичные импульсы на выходе , и формирующего эвена (ФЗ), реакция которого на единичный импульс тождественна форме реальных импульсов. При этом сигналы на входе и выходе САУ рассматривают лишь в дискретные моменты времени. Такие функции, значение которых вначале каждого периода совпадают со значением исходной непрерывной функции, а в остальное время равны нулю, называют решетчатыми функциями.
Последовательность модулированных импульсов на выходе ИЗ (рис. 1.1.2.6) может быть описана

где х(1Ти)— решетчатая функция соответствующая непрерывной функции x(t);
- последовательность модулированных единичных
импульсов; номера импульсов.
Изображение сигнала х*(|) по Лапласу
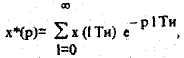
и если заменить е на Z, то получим формулу ^-преобразования
дик дискретных значений х :
Вид передаточной функции ФЗ Кф (р) (рис. 1.1.2.6) определяется формой реальных импульсов, которая может быть охарактеризована функцией SH(t), равной нулю вне интервала 0< t £ Ти. При этом Кф (р) = SH(t), так как изображением единичного импульса по Лапласу является единица.
6
Для наиболее распространенных прямоугольных импульсов единичной высоты и длительности уТи , каждый из которых может быть получен как разность двух ступенчатых функций, смещенных на время уГц« получаем

Бели формирующее звено отнести к непрерывной части (рис. 1.1.2.6),то передаточная функция приведенной непрерывной части САУ приобретает вид
У(р) Кп(р)= — = Кф(р) Кнч(р) .
*(Р) .
Так как реакцией приведенной непрерывное части на единичный
импульс на входа x*(t)=5(t) является функция Леса 0)п (t) = у (t), a изображение единичного импульса по Далласу равно единице , то передаточная функция КП(р) представляет собой изображение Лапласа
приведенной функции веса ,тл. Кп(р) = а>п(р)5у(р) .
В общем случае пропорциональная связь между изображением сигналов x(t) и у(0 в импульсных САУ отсутствует. Однако такая связь существует между изображениями дискретных сигналов x*(t) и y*(t) . Сигнал y*(t) получается из непрерывного штат y(t) при пропускании его через простейшее импульсное звено так .как это показано на рис. 1,1,2а,
Дискретная передаточная функция разомкнутой системы представляет собой отношение дискретных изображений y*(i) и х*(р) :

По аналогии с непрерывными системами , у которых передаточная функция Кр(Р) есть преобразование Лапласа at функции веса Q3(t) , функция KpfZ) равна дискретному изображению выходной величины , представляющей решетчатую приведенную функцию веса 00,,(|ТИ).
7
При определении Кр (Z) вначале по передаточной функции Кп (Р) находят оригинал у (l)=6>n(t) , затем делают переход к решетчатой функции У (' Ти) = СО (1 Ти) и далее находят Кр (Z) как ^преобразование решетчатой функции . Эту задачу решают , используя специальные таблицы изображений решетчатой функции ( например , таблицы П.4 и П.5 в [I]). При этом передаточную функцию Кр(Р) представляют в виде суммы передаточных функций эквивалентных согласно-параллельно -соединенных звеньев , параметры которых находит по методу неопределенных коэффициентов . В результате дискретная передаточная функция Кр( Z.) подучается путем суммирования дискретны* передаточных функций , определенных для каждого параллельного звена в отдельности.
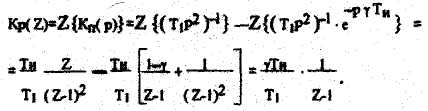
Допустим , для примера , что непрерывная часть системы содержит одно интегрирующее звено с постоянной времени Т| , а импульсный элемент формирует прямоугольные импульсы шириной уТи, гае 0<г<|-скважность импульсов. В этом случае

Тогда используя таблицы П.4 и П.5 [1], получаем :
От
дискретных передаточных
функции можно перейти к частотным
характеристикам посредством подстановки
в них
![]()
В
отличие от непрерывных САУ частотные
характеристики частотные характеристики
ишгуаьсных систем являются периодическими
функциями частоты. Попону их следует
рассматривать лишь в диапазоне
частот О s Ш s «ы/2 , Где ®и* 2*/Гн- круп»» частота следования импульсов ■ Дяясс частотные хярвктврявтики повторяются.
8
Для рассматриваемого примера импульсной СЛУ, непрерывная часть которой представлена одним интегрирующим звеном .

На комплексной плоскости АФЧХ Кр^-1® ) представляет собой прямую > отстоящую влево от нтчада координат на величину 'I^ИIZV^ .
Граница устойчивости замкнутой импульсной САУ, согласно критерию устойчивости Набквиста, будет при прохождении этой прямой через точку (-1 , jO). Отсюда можно получить условие устойчивости :
jflJL< , „да J. <_2_ .
2Т| Ti Ти
Вели заменить импульсную САУ эквивалентной непрерывной системой с передаточной функцией разомкнутого контура К.рЭКВ(р) - у к^ р) и имеющей эквивалентную частоту среза асэ1(В , то для ванного примера
Т,Р
Частоту <вспРеЯ = 2^н , зависящую от периода следования импульсов, называют предельной частотой среза эквивалентной непрерывной системы . Тогда условие устойчивости замкнутой импульсной системы приобретает вид
©е™" < а>спр«Я я 2/Ти .
S рассмотренном примере непрерывная часть представлена одним интегрирующим звеном . В общем случае число типовых звеньев, включенных последовательно в контур регулирования, может быть значительно
большим. При этом аналитические зависимости между Юс9*8 и параметрами непрерывной части становятся громоздкими и непригодными дня практического пользования. В то же время с точки зрения устойчивости системы важными являются не все корни числителя и знаменателя передаточной функции КРЖВ(Р), а лишь те, которые вызывают изломы характеристики Ьрэкв = Ig КрЭк^Ш) при частотах , удаленных от «Вс3*8 не более, чем на одну декаду .
9
Влияние на устойчивость изломов Lp3rB при <В > Шсэкв эквивалентно ' влиянию звена постоянного запаздывания с временем постоянного запаздывания , равным сумме постоянных времени апериодических звеньев , определяющих изломы Ьрэкв на высоких частотах , и меньшим периода следования импульсов . Поэтому , если Lp3KB имеет увеличение отрицательного наклона лишь в области высоких частот, определенное выпи условие устойчивости полностью сохраняется . При увеличении отрицательного наклона Lp3KB в диапазоне частот 0.1 Шс < <В < юсэкв приведенное выше условие устойчивости следует рассматривать как приближенное .
Можно сформулировать следующий приближенный критерий устойчивости линейных импульсных САУ : если эквивалентная непрерывная система устойчива , то для устойчивости замкнутой импульсной системы достаточно , чтобы частота среза эквивалентной непрерывной системы не превышала частоту , равную 2 У Ти , где Ти - период следования импульсов . При использовании ЛАЧХ для оценки устойчивости импульсной САУ достаточно построить точную ЛАЧХ - Ц>экв , определить частоту среза Юс3™ при Lp3*8 = 0 и сопоставить ее с в>с11рзд s ^ Ти ■ Ваш (Всэкв <<вдпред f то замкнутая импульсная САУ устойчива
Если Юс3™ > Cue"!*»* . замкнутая импульсная САУ неустойчива. Пример оценки устойчивости САУ с импульсным элементом дан на рис. 1.1.3 , где граница устойчивости отмечена штриховкой.
Наличие в системе импульсного элемента при' <ВСЭКВ < в>спР*'* практически не отражается на гладкой составляюшей переходного процесса выходной координаты САУ , т.е. замкнутая импульсная система ведет себя как эквивалентная непрерывная система с передаточной функцией
Кр( р) = Крэкв( р) = 1 Квч( р) . При Шс51™ > <ВсПред наличие в контуре регулирования импульсного элемента приводит к неустойчивости замкнутой САУ в то время .как эквивалентная непрерывная система была бы устойчива . В работе изменение частоты ШсПРЗД достигается пу»ем изменения периода следования импульсов Ти импульсного элемента (рис. 3.2. [11).
10
Эквивалентная вмферывнн САУ
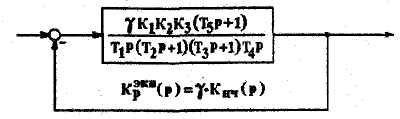
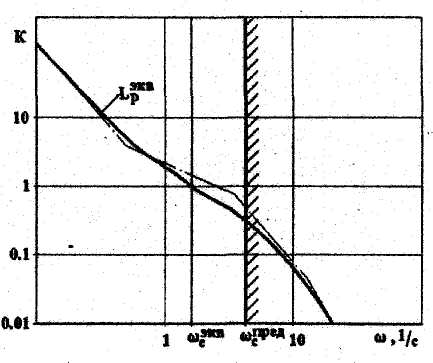
Рис. 1.13. Оценка устойчивости САУ с импульсным элементом
II
РАБОТА 2. СИСТЕМА С РЕЛЕЙНЫМ ЭЛЕМЕНТОМ
1. Цепь работы
Изучить особенности динамики замкнутой системы с репейным элементом.