

3.6. Скорость и ускорение точек твердого тела, вращающегося вокруг неподвижной оси
При вращении твердого тела вокруг неподвижной оси все точки тела описывают окружности, центры которых лежат на оси вращения. Расстояние точки от оси вращения, равное радиусу этой окружности, обозначим R. Скорость точки (рис. 2.28) М называется вращательной или окружной скоростью этой точки и ее величина определяется по формуле
![]() (2.8)
(2.8)
Модуль вращательной скорости точки твердого тела равен произведению расстояния от точки до оси вращения на угловую скорость тела.
Из формулы (2.8) следует, что модули вращательных скоростей различных точек вращающегося тела пропорциональны расстояниям от этих точек до оси вращения (рис. 2.29).
Ускорение точки М определим по его составляющим: касательному ускорению, направленному по касательной к окружности, и нормальному ускорению, направленному к центру С.
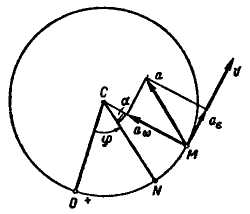
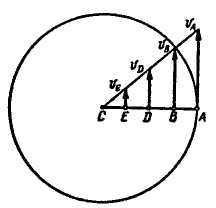
Рис. 2.28 Рис. 2.29
Эти
ускорения точек вращающегося тела
называют вращательным
и центростремительным ускорениями и
обозначают
![]() и
и
![]() (рис.
2.29)
(рис.
2.29)
![]() (2.9)
(2.9)