

Глава 8. Современные системы связи и навигации
8.1. Спутниковая система межевания земель (ссмз), проект «Москва»
Данная система обеспечивает самую совершенную технологию «сетевого решения» для определения координат надёжно и с высокой точностью, а также дополнительный широкий спектр услуг.
Система работает в пределах московской области и прилежащих территориях примерно в зоне 300 на 400 км., там где имеется сеть референцных станций.
Принцип действия системы основан на возможности одновременного получения радиосигнала с трёх (или более) искусственных спутников земли (ИСЗ) системы GPS и одной (или более) референцной станции, расположенной на местности. После получения таких сигналов с помощью спутникового приёмника SR 530 на месте измерения, информация по каналам связи GSM передаётся на вычислительный центр (ВЦ) в г. Москве, где осуществляется её обработка (дифференциальная обработка информации). См. рис. 8.1.








ВЦ РС
РС




Рис.8.1 Функциональная схема ССМЗ.
При использовании чисто спутниковой системы GPS (или отечественной ГЛОНАСС) и достаточно дорогого терминала, обеспечивающего обработку информации на месте, можно получить точность 10 – 30 м, а при наличии хотя бы одной опорной референцной станции и возможности обрабатывать получаемую информацию на центральном мощном ВЦ, можно в зависимости от продолжительности измерений получить следующие характеристики по точности измерений:
режим статика (время измерений несколько часов) 2 - 3 мм;
быстрая статика (несколько минут) 1 см;
режим реального времени (несколько секунд) : - в плане 1 – 2 см,
- по высоте 2 -3 см;
кинематика (в движении) точность определяется в зависимости от
скорости движения и заданных интервалов измерений.
Получение данных точностных характеристик в рассматриваемой системе достигается, во-первых благодаря использованию референцных станций с точно известными координатами, которые выполняют роль «псевдоспутников». Во-вторых, за счёт возможности набрать статистику, причём объём набранной статистики и определяет возможности повышения точности, которые достигаются при дифференциальной обработке информации на СПО центрального ВЦ.
8.2. Спутниковые радионавигационные системы (срнс)
Первые работы в области навигационного использования ИСЗ были опубликованы в 1957 г., одновременно с запуском первого ИСЗ. В 1958— 1959 гг. были проведены работы, определившие технический облик первого I поколения СРНС, который был реализован в советской низкоорбитальной системе Цикада. Сходные решения были использованы в американской низкоорбитальной СРНС Транзит.
Система Цикада включала в себя 4 НКА, система Транзит — 6 НКА, высота орбиты НКА этих систем составляла около 1000 км, период обращения — около 100 мин. При таких параметрах зона радиовидимости НКА для наземного потребителя имеет радиус порядка 2000 км, а время пребывания НКА в этой зоне - 5... 15 мин, перерыв между сеансами наблюдения отдельных спутников лежит в пределах от 35 мин (в приполярных зонах) до 90 мин (вблизи экватора).
Точность таких систем составляла от 50 м при неподвижных объектах до 500 м при погрешности измерения собственной скорости равной 0,5 м/с. Такие параметры обеспечивали технические средства, существовавшие на тот период времени.
В настоящее время созданы СРНС II поколения, имеющие среднеорбитальные НКА с высотой орбиты порядка 20 тыс. км (дальнейшее увеличение высоты орбиты нецелесообразно, так как не приводит к расширению зоны видимости НКА). Период обращения НКА при такой высоте орбиты равен примерно 12 ч. В этом случае, для того чтобы гарантировать в любой точке Земли одновременное наблюдение не менее 4 НКА, в составе орбитальной группировки должно быть не менее 18 НКА, однако для повышения точности и надежности навигационных измерений было решено увеличить это число до 24.
Кроме изменения структуры и геометрии орбитальной группировки, в СРНС второго поколения с самого начала были заложены технические средства, обеспечивающие прецизионную (с точностью до единиц наносекунд) взаимную синхронизацию бортовых шкал (эталонов) времени НКА. Большое внимание было уделено также развитию средств высокоточного определения и прогнозирования параметров орбит (эфемерид) НКА. Достаточно сказать, что для достижения требуемой точности прогноза эфемерид должны учитываться такие факторы, как световое давление на НКА, влияние релятивистских эффектов на гравитационное поле Земли, неравномерность вращения Земли и ее полюсов, а также наличие реактивных сил, связанных с газоотделением материалов покрытия НКА.
Решение перечисленных, а также и многих других второстепенных задач позволило создать, ввести в эксплуатацию и предоставить в пользование всему населению Земли две среднеорбитальные СРНС второго поколения: российскую, получившую название ГЛОНАСС (Глобальная навигационная спутниковая система) и американскую, первоначально названную 'NAVSTAR (Navigation Satellite Time and Ranging), а в настоящее время обычно именуемую GPS (Global Positioning System).
Точность современных СРНС составляет:
16 м (без использования наземных опорных пунктов);
От нескольких мм до 0,5 м (с использованием наземных опорных пунктов с дифференциальной обработкой информации в зависимости от расстояния до данных пунктов).
Так, например, почти вся территория стран ЕЭС покрыта сетью опорных пунктов, обеспечивающих точность в пределах не хуже 0,5 м. Напомню, что про возможности в московской области я рассказал ранее.
Основой, обеспечивающей точность работы современных СРНС, является:
Высокоточная информация об истинном положении НКА (при этом отклонения от орбиты по трём плоскостям не более 5,10 и 20м);
Высокоточной системой синхронизации времени (СКО за сутки не более 7 нс);
Совершенной наземной системой контроля, управления и коррекции (распределённой соответствующим образом по всему земному шару);
Функциональными дополнениями или дифференциальными подсистемами (формируемыми по необходимости в различных регионах).
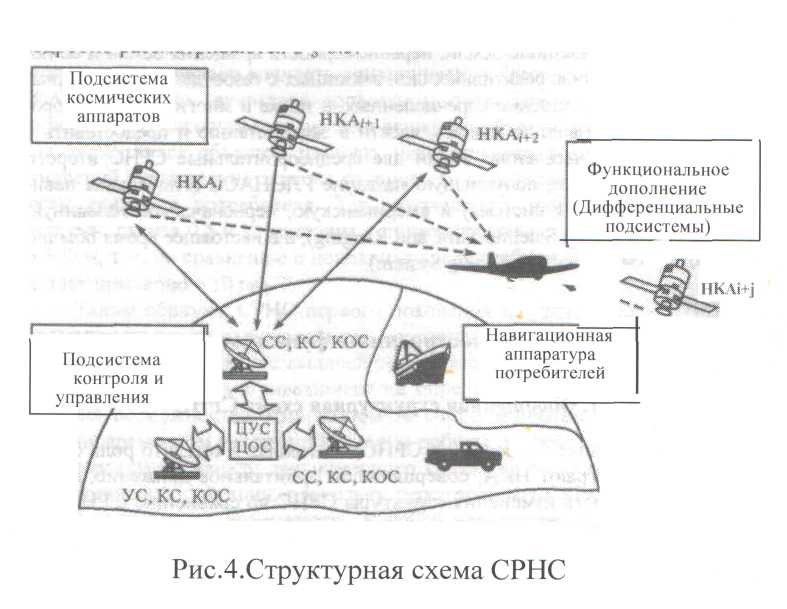
Структурная схема СНРС приведена на рис.8.2. На данном рисунке использованы следующие сокращения, обозначающие оборудование, входящее в состав подсистемы контроля и управления:
ЦУС – центр управления системой ;
ЦОС – центральный орбитальный синхронизатор;
СС – станция слежения;
КС – радиотехническая контрольная станция;
КОС - квантово-оптическая контрольная станция;
АКП – аппаратура контроля поля.
Современные СНРС являются системами двойного назначения и открыты для коммерческого использования и в настоящее время широко используются в самых разных сферах деятельности. Однако, надо понимать, что чем более развитая и прогрессивная в техническом плане страна, тем больше она зависит от данных технологий и дальше будет зависеть ещё сильнее и сильнее! Поэтому только то государство, где имеется собственная СНРС, которую никто не отключит в «особый период» может считать себя действительно суверенным.
Надо помнить, что всё то же самое относится к ПО и ПК, используемых в государственных, финансовых и военных ведомствах потому, что так же может быть «отключено» разработчиками.
СРНС используются:
На транспорте (воздушном, автомобильном, железнодорожном и морском);
В картографии и геодезии;
В строительстве;
В межевании и планировании территорий;
Для спец. служб (МЧС, милиция, ФСФ, скорая помощь и др.);
Системах безопасности и индивидуальной нвигации.
Причём этот список будет постоянно расти.