

5.9. Зенитные прицелы
Для поражения воздушной цели стволу орудия в момент выстрела необходимо придать такое положение в пространстве, при котором снаряд попал бы в точку, лежащую впереди летящей цели на пути ее движения. Точка Ау (рис. 5.18), в которой должна произойти встреча снаряда с целью, называется точкой встречи или упрежденной точкой, при этом точки А и О, соответственно, положение цели в момент выстрела и местоположение орудия. Чтобы снаряд попал в упрежденную точку Ал необходимо ось ствола орудия направить в момент выстрела в направлении прямой линии выстрела, положение которой определяется требуемыми углами: упреждения и прицеливания а. При этом угол а должен соответствовать упрежденным значениям наклонной дальности Ду и угла места цели еу, которые характеризуют положение точки Ау в плоскости стрельбы Величины углов упреждения и прицеливания непрерывно изменяются, поскольку цель
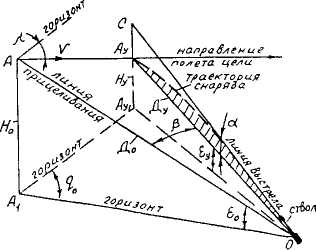
Рис 5 18.
движется. Для наводки зенитных орудий в цель используются автоматические зенитные прицелы, которые сами автоматически вырабатывают углы упреждения и прицеливания после ввода в прицел параметров движения цели и условий стрельбы. Основными параметрами движения цели при этом являются наклонная дальность До или высота цели Но; угол места цели ео; скорость полета цели V; курсовой угол q0 (иногда называют курсовой параметр); угол пикирования А (или кабрирования).
Наклонная дальность определяется либо дальномером, либо на глаз. Скорость цели определяется прибором или по типу цели. Угол места цели предварительно не определяется и вводится в прицел автоматически в процессе визирования по цели. Курсовой угол и угол пикирования (кабрирования) определяются по видимому направлению движения цели.
Наиболее простыми зенитными прицелами, позволяющими вести стрельбу по воздушным целям при самых разнообразных их направлениях и скоростях, являются так называемые кольцевые прицелы (рис. 5.19). На стволе орудия укреплена линейка 1 с передним кольцевым визиром 2 (радиуса R), который с помощью отвеса 3 удерживается в горизонтальной плоскости. Визир 2 состоит из ряда концентрических колец. Задний визир с целиком О (глаз наводчика) установлен на стойке 4 в задней части ствола. Линия прицеливания Oav (в момент выстрела) образует с осью ствола ору-
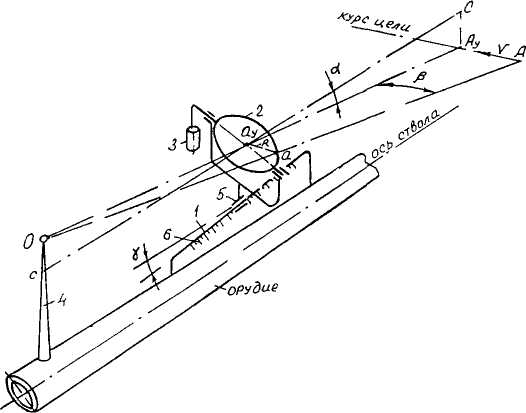
Рис 5.19 Схема прицеливания зенитного орудия с кольцевым прицелом
дия прицельный угол а. Расстояние Oat выбирается в соответствии с наклонной дальностью до цели путем перемещения каретки 5 с передним визиром 2 вдоль линейки 1 с дистанционной шкалой (дистанционная линейка). Дистанционная линейка может быть установлена еще и под углом у по отношению к оси ствола для коррекции устанавливаемых на прицеле прицельных углов а. При малых углах места цели е наводка при горизонтальном расположении кольцевого переднего визира невозможна, поэтому отвес 3 поворачивают на 90° относительно цапф колец, при этом визир устанавливается в вертикальное положение.
При наводке орудия с кольцевым прицелом визирование в цель осуществляется через целик О и какую-либо точку а, лежащую на контуре кольца переднего визира. Величина выбранного кольца визира соответствует определенной скорости V полета цели. Для разных значений скорости V, желательно иметь и соответствующее число R,. В практике используют до пяти колец, стянутых спицами. В процессе прицеливания точка а на соответствующем кольце выбирается наводчиком таким образом, чтобы цель казалась перемещающейся в центр колец (точка с,), а направление радиуса R (отрезок ауа) был параллелен курсу цели. В таком случае получается построение прицельного треугольника Оаау, подобному пространственному треугольнику ОААу. Таким образом, в процессе наводки орудия будет обеспечен угол упреждения В. Учет углов пикирования или кабрирования требует большого навыка наводчика. Эффективность стрельбы с кольцевыми прицелами существенно зависит от опытности стреляющего.
Принцип устройства автоматических зенитных прицелов в большинстве случаев основывается на гипотезе: за время полета снаряда до упрежденной точки Ау, цель движется равномерно и прямолинейно в любой плоскости. Прицел автоматически вырабатывает угол упреждения В и углы прицеливания а путем построения упредительного и баллистического треугольников (рис. 5 20).
Углы упреждения В и прицеливания а получаются на прицеле путем построения в принятом масштабе прицела малых треугольников прицела аОау и ауОс, подобных пространственным (большим) треугольникам АОАу и АуОс. Построение сторон треугольников аОау и ауОС в прицеле производится следующим образом:
длина курсовой
линейки
![]() аау,
строится параллельно курсу цели и
пропорционально скорости цели V
масштабе
прицела К:
аау,
строится параллельно курсу цели и
пропорционально скорости цели V
масштабе
прицела К:
![]() (5.1)
(5.1)
где t - время полета цели из точки А до точки Ау, равное времени полета снаряда из точки О до точки Ау;
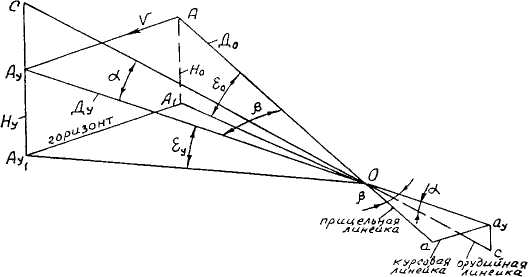
Рис. 5.20 Схема построения упредительного и баллистического треугольников
длина орудийной линейки Ос строится также в масштабе прицела пропорционально средней скорости полета снаряда Vс из точки О до точки А,. Орудийная линейка параллельна оси ствола орудия, при этом:
![]() (5.2)
(5.2)
длина прицельной линейки Оа строится в масштабе прицела пропорционально текущей (в момент выстрела) дальности До до цели. Прицельная линейка параллельна линии прицеливания (линия визирования ОА), при этом:
![]() ;
(5.3)
;
(5.3)
сторона аус характеризует величину понижения (САу) траектории снаряда под линией выстрела ОС для упрежденной точки Ау. Величину САу /t можно считать средней скоростью понижения снаряда;
сторона Оау, в прицеле получается в результате построения других четырех сторон Оа, а ау, ау с и Ос.
Введением в прицел
с помощью механизмов прицела входных
данных (До,
Но,
![]() ,
V
и
,
V
и
![]() )
устанавливаются
длина линеек и их направления, то
есть производится геометрическое
построение упредительного аОау
и баллистического
ауОс
треугольников
прицела. При этом линия прицеливания
(линия визиров) разворачивается
относительно оси ствола на требуемые
углы упреждения В и прицеливания а.
Таков этап установки.
)
устанавливаются
длина линеек и их направления, то
есть производится геометрическое
построение упредительного аОау
и баллистического
ауОс
треугольников
прицела. При этом линия прицеливания
(линия визиров) разворачивается
относительно оси ствола на требуемые
углы упреждения В и прицеливания а.
Таков этап установки.
На этапе наводки с помощью механизмов орудия последнее вместе с линией прицеливания поворачивается в вертикальной и горизонтальной плоскостях до совмещения прицельной линии визира с линией цели и далее производится выстрел.
На рис. 5.21 приведена принципиальная схема автоматического прицела с построением вышеуказанных линеек: курсовой, орудийной и прицельной. Орудийная линейка 1 (со шкалой дальности до цели) связана со стволом орудия и параллельна его оси Курсовая линейка 2 (со шкалой скорости цели) смонтирована на вертикально расположенной оси 4 и может быть установлена параллельно курсу цели путем установки, связанной с линейкой силуэта - самолетика 5 по курсу цели. Прицельная линейка 3 шарнирно скреплена в точках О и а с линейками 1 и 2. На этой линейке установлено визирное приспособление 6. Перемещением ползунов 7 и 5 (и шарнира а) изменяются величины сторон Оа и аал упредительного треугольника Oaav. Одновременно с этим изменяется и величина стороны Ос баллистического треугольника О и ас. Перемещением линейки 2 в вертикальных направляющих 9 изменяется вторая сторона ахс баллистического треугольника. Указанные перемещения осуществляются в виде установок по соответствующим шкалам и по входным данным с помощью отдельных механизмов прицельного устройства. На этапе наводки подъемным 10 и поворотным 11 механизмами орудие разворачивают вместе с прицелом до совмещения прицельной линейки 3 и линии визира 6 с линией цели О А. После чего линия Оау окажется совмещенной с упрежденной линией цели ОАу, а линейка 1 (линия Ос) установится по отношению к этой линии под углом прицеливания а. Ствол орудия примет положение в пространстве, отвечающее упрежденной точке Ау. В процессе наводки курсовая линейка 2 должна удерживаться параллельно курсу цели. Это обеспечивается с помощью механизма стабилизации курса, который кинематически связывает эту линейку с поворотным механизмом орудия. Первоначальная установка линейки 2 по курсу цели производится, как правило, вручную с помощью силуэта - самолетика 5.

Рис 5 21 Кинематическая схема зенитного прицела