

4.7. Роботизация артиллерийских комплексов
Роботизация артиллерийских комплексов (АК) предусматривает использование робототехнических систем на всех стадиях обеспечения процесса функционирования АК, начиная со складов боеприпасов и заканчивая досыланием боеприпаса в канал ствола артиллерийского орудия и производством выстрела. На рис. 4.33 показана обобщенная схема передвижения боеприпасов и возможные области применения робототехнических систем: 1 - склад боеприпасов, оборудованный
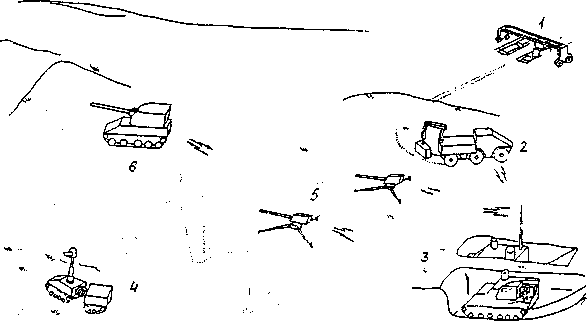
Рис. 4.33. Области применения робототехнических систем в составе АК
робототехнической системой, обеспечивающей погрузку, разгрузку и сортировку укупорок с боеприпасами; 2 - транспортная (транспортно-заряжающая) машина, оборудованная робототехнической системой, обеспечивающей погрузку-выгрузку боеприпасов или зарядку боеукладок артиллерийских систем; 3 - система управления группой артиллерийских систем (АС), оборудованная робототехнической системой информационно-управляющего типа; 4 - роботизированная, дистанционно-управляемая, разведочно-дозорная система; 5 - буксируемые артиллерийские установки, оборудованные робототехнической системой, обеспечивающей заряжание и наведение АС при дистанционном управлении; 6 - самоходная артиллерийская установка (танк), оборудованная робототехнической системой, обеспечивающей заряжание артиллерийского орудия.
В целом процесс перемещения боекомплекта со склада до его досылания в канал ствола артиллерийского орудия разбит на три основные этапа:
доставка боекомплекта с войскового склада до места ведения боевых действий;
перемещение боекомплекта с транспортных средств в боеукладку артиллерийской системы;
перемещение элементов выстрела из боеукладки в канал ствола артиллерийского орудия.
Первый этап предусматривает нахождение требуемого типа боекомплекта на складе и перемещение его до места погрузки; погрузку боекомплекта на транспортную (транспортно-заряжающую) машину; транспортировку боекомплекта до места ведения боевых действий; разгрузку боекомплекта. На рис. 4.34 показан один из вариантов робототехнической системы для обслуживания склада боеприпасов. Из штабеля 1 укупорок (контейнеров) с боеприпасами требуемая укупорка 2 с помощью манипулятора 3 перемещается в вертикальном и горизонтальном направлениях, и затем с помощью транспортного устройства 4 доставляется к месту погрузки на транспортную (транспортно-заряжающую) машину. Весь процесс выбора требуемого типа боекомплекта, перемещения его к месту погрузки и погрузка осуществляется либо по заданной
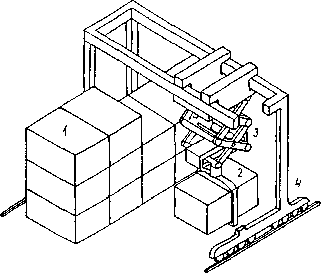
Рис. 4.34. Роботизированная система обслуживания склада боеприпасов
программе, либо дистанционно с помощью оператора. В случае изменения конфигурации транспортируемого объекта возможно применение других типов манипуляторов и захватных устройств.
Второй этап предусматривает погрузку боекомплекта в транспортно-заряжающую машину; транспортировку боекомплекта до места его выгрузки (до артиллерийской системы); перемещение боекомплекта из транспортно-заряжающей машины в боеукладку артиллерийской системы.
На рис. 4.35 в качестве примера, показана операция загрузки боекомплекта 3 из транспортной машины 1 в боевую машину 5 с помощью разгрузочного манипулятора 4, управляемого оператором 2.
Третий этап предусматривает выбор типа снаряда, выбор типа заряда, установку взрывателя; перемещение элементов подготовленного выстрела на линию досылания и досылание.
Перечисленные выше операции могут осуществляться вручную, с использованием средств механизации и автоматизации и с использованием робототехнических систем.
Робототехнические системы можно разделить на манипуляционные, мобильные и информационно-управляющие. Манипуляци-онные робототехнические системы предназначены для транспортировки и оперирования в пространстве различными объектами и инструментами и выполняют функции человеческой руки. Мобильные робототехнические системы представляют собой некоторое шасси, способное перемещаться по поверхности или в пространстве, оснащенное какой-либо системой управления и предназначенное для транспортировки груза или оборудования, в качестве которого могут выступать робототехнические системы других видов. Информационно-управляющие робототехнические системы
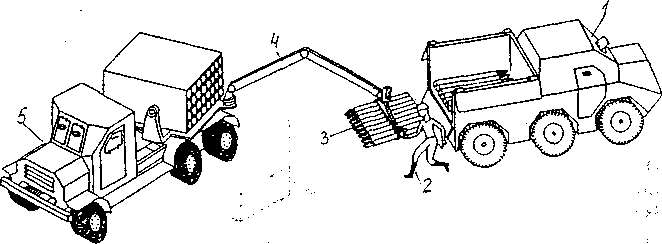
Рис. 4.35. Загрузка боекомплекта в систему залпового огня из транспортной машины с помощью разгрузочного манипулятора
представляют собой комплексы измерительно-информационных и управляющих средств, производящих сбор, обработку и передачу информации, а также использование ее для формирования различных управляющих сигналов.
По характеру участия человека в процессе управления робото-технические системы подразделяются на автоматические, дистанционно-управляемые и ручные.
Автоматические робототехнические системы способны выполнять свои рабочие функции без участия человека. В зависимости от уровня гибкости они подразделяются на программные, адаптивные и интеллектные:
программные робототехнические системы действуют в соответствии с заложенной в них программой, которая может быть изменена путем введения новых данных извне;
адаптивные робототехнические системы могут самостоятельно, в той или иной степени, приспосабливаться к внешним условиям;
интеллектные робототехнические системы вырабатывают решение о своих дальнейших действиях, обеспечивающих выполнение поставленной задачи в неопределенных и меняющихся условиях на основе распознавания обстановки и других элементов искусственного интеллекта.
Дистанционно-управляемые робототехнические системы управляются человеком-оператором, находящимся за пределами рабочей зоны. В зависимости от уровня глобальности подаваемых оператором команд дистанционно-управляемые робототехнические системы могут занимать место в диапазоне между копирующими (то есть воспроизводящими движение задающего органа) и супервизорными (то есть выполняющими укрупненные команды, такие как «взять», «выйти в точку с координатами» и т. д.).
Робототехнические системы с ручным управлением управляются человеком-оператором, находящимся в рабочей зоне, через органы управления, расположенные, например, на грузозахватном устройстве.
Рассмотрим возможные области применения робототехнических систем на этапе перемещения элементов выстрела из боеукладки в канал ствола артиллерийского орудия. Существуют два подхода к решению задачи роботизации процесса заряжания АС:
разработка роботизированной системы заряжания при создании новых образцов АС;
модернизация существующих образцов АС путем введения в состав узла заряжания элементов и узлов робототехнических систем.
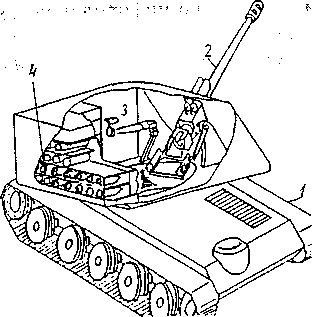
Рис. 4.36. Самоходная артиллерийская установка с полностью роботизированной системой заряжания
В первом случае при разработке системы заряжания принципиально нового типа возможно создание робототехнической системы манипуляционного типа, обеспечивающей весь цикл процесса заряжания с помощью одного или нескольких манипуляторов с единой системой управления. При проектировании подобных систем заряжания необходимо учитывать тот факт, что сложность системы управления и надежность функционирования разрабатываемой системы в большей степени зависит от количества ее степеней свободы, то есть от сложности выполняемых перемещений. На рис. 4.36 показан пример самоходной артиллерийской установки 1 с полностью роботизированной системой заряжания манипуляционного типа 3, которая обеспечивает перемещение элементов выстрела из боеукладки 4 в канал ствола орудия 2.
В связи с этим целесообразно выполнение операций, не связанных со сложными перемещениями, такими как перемещение элементов выстрела в фиксированное положение в боеукладке артиллерийского орудия, использовать так называемые жесткие автоматы (например, конвейерного или барабанного типа). Таким образом, наиболее перспективными следует считать роботоавтоматизированные системы заряжания АС, то есть системы, включающие в себя узлы и элементы как автоматики, так и робототехнических систем. Помимо обеспечения высокой скорострельности, роботоавтоматизированные системы заряжания позволяют создать такую компоновку АС в целом, при которой экипаж полностью изолирован от орудийного отсека.
Вопросам решения второй задачи, то есть модернизации существующих образцов АС путем введения в их состав автоматов заряжания, были посвящены предыдущие параграфы данной главы.
Разработка роботоавтоматизированных систем заряжания АС нового типа, позволяющих решить проблемы быстрого возобновления боекомплекта, повышения скорострельности и создания новых компоновочных схем АС в целом, позволит создать артиллерийские комплексы нового поколения.