

16. Синтез инвариантных системм упр-ния.
З адачи
инвариантности-обеспечение
независимости каких-то координат от
возмущающих воздействий.
адачи
инвариантности-обеспечение
независимости каких-то координат от
возмущающих воздействий.
Пусть сис-ма опис-ся сис-ой ур-й:
a11x1+a12x2+a13x3=ν(t);
a21x1+a22x2+a23x3=0;
a32x2+a33x3=0. На основании ур-й м. составить стр-ю сх-му, позвол-ю нах-ть переменные x:
Из сх. видно, что возмущение ν(t) напрямую влияет на корд-ту x1. При такой стр-ре сис-мы почти невозможно обеспечить инвар-ть координаты x1. Изменим порядок ур-й:
a21x1+a22x2+a23x3=0;
a32x2+a33x3=0
a11x1+a12x2+a13x3=ν(t);
Сост-м новую стр-ю схему:
В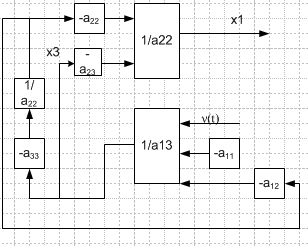 торая
стр-я сх. им-т два
торая
стр-я сх. им-т два
Канала для направления
возд-й от возмущения ν к переменной х1. Наличие 2
каналов позволяет
организ-ть прох-е возмущ-я
т.о., ч/бы суммарный эф-т
от возмущ-я сводился к нулю(пр-п двухканальности).
Возьмем одноконтурную систему:
В данной сис-ме возмущение доступно
измерению, что позвол-т ис-но создать 2
канал для прох-я возмущения на выход
сис-мы:
данной сис-ме возмущение доступно
измерению, что позвол-т ис-но создать 2
канал для прох-я возмущения на выход
сис-мы:
У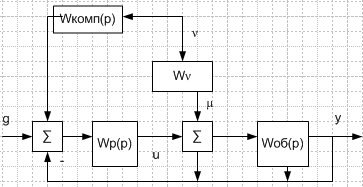 словие
компенсации на основании стр-ой схемы:
словие
компенсации на основании стр-ой схемы:
νWкомп(p)Wр(p)=νWν(p);
Wкомпен-ра(p)= Wν(p)/ Wр(p);
17. Многосвязные лин-е системы и их анализ.
Многосв-й объект управ-я сод-т m управ-х каналов и n выходов.
В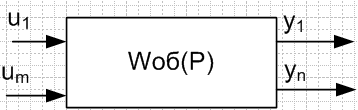 этих сис-х присут-т взаимосвязь каналов.
Учет взаимосвязи каналов яв. одним из
важнейших требований при синтезе систем
управления такими объектами. Для этого
восп-ся м-дом Бристоля, кот. закл-ся в
постр-и спец-ой матрицы:
этих сис-х присут-т взаимосвязь каналов.
Учет взаимосвязи каналов яв. одним из
важнейших требований при синтезе систем
управления такими объектами. Для этого
восп-ся м-дом Бристоля, кот. закл-ся в
постр-и спец-ой матрицы:
 элементы
кот-ой в статике соот-т соотношению
λ1j=(dyi/duj)/(dyi/duj)c
(все контуры разомкнуты/все контуры,
кроме uc,
замкнуты), где yi-уст-ся
значение i-го
выхода, uj-управление.
Необходимо опр-ть коэф-ты перед-й матрицы:
элементы
кот-ой в статике соот-т соотношению
λ1j=(dyi/duj)/(dyi/duj)c
(все контуры разомкнуты/все контуры,
кроме uc,
замкнуты), где yi-уст-ся
значение i-го
выхода, uj-управление.
Необходимо опр-ть коэф-ты перед-й матрицы:

Затем
надо найти элементы матрицы: [ ]-1
]-1
Эл-ты
матрицы Λ нах-ся из выражения:
 -1ij
путем перемнож-я эл-тов с одинак-ми
индексами. Анализ мат-рицы Λ показ-т,
что сис-ма имеет слабую связан-сть, если
диаг-е эл-ты близки к ед-це, а недиаг-е
сущ-но меньше (близки к 0). 1н из первых
м-дов синтеза систем был основан на
компенс-и или развяз-и перектестных
связей объекта и получил название
автоном-го рег-ния. Авт-е рег-е обесп-т
раздельное упр-ние вых-ми объекта за
счет вкл-я в состав системы компенсатора,
напр., м/ду рег-ром и объектом. Перед-я
матрица расширенного объекта равна:
Wоб(p)Wк(p)=Wр.об.(p).
В кач-ве эл-тов передаточной матрицы
расшир-го объекта принимаются диагональные
элементы передаточной матрицы исх.
объекта:
-1ij
путем перемнож-я эл-тов с одинак-ми
индексами. Анализ мат-рицы Λ показ-т,
что сис-ма имеет слабую связан-сть, если
диаг-е эл-ты близки к ед-це, а недиаг-е
сущ-но меньше (близки к 0). 1н из первых
м-дов синтеза систем был основан на
компенс-и или развяз-и перектестных
связей объекта и получил название
автоном-го рег-ния. Авт-е рег-е обесп-т
раздельное упр-ние вых-ми объекта за
счет вкл-я в состав системы компенсатора,
напр., м/ду рег-ром и объектом. Перед-я
матрица расширенного объекта равна:
Wоб(p)Wк(p)=Wр.об.(p).
В кач-ве эл-тов передаточной матрицы
расшир-го объекта принимаются диагональные
элементы передаточной матрицы исх.
объекта:
Wр.об.=W011(p) 0 0 … 0
0 W022(p) 0 … 0
. . . . .
. . . . .
0 0 0 … W0nn(p)
Или Wр.об.(p)=diagWоб(p)
Тогда м. найти передаточную матрицу компенсатора:
Wk(p)= Получ-е
матем-м путем рез-ты треб-т оценки из
усл-й их физ-ой реализ-сти.
Получ-е
матем-м путем рез-ты треб-т оценки из
усл-й их физ-ой реализ-сти.
18. Синтез многосв-х лин-х систем с исп-м модального упр-я и компенсаторов.
Задача: при известных дин-х хар-х объекта упр-ния, зад-х соотв-ми перед-ми матрицами, опр-ть стр-ру и эл-ты матрицы рег-ра т.о., ч/бы при устан-х воздей-х хар-р перехода сис-мы в новое установ-ся состояние минимально отличался от заданного.
Пусть S(p) - n-мерная вектор-фун-я зад-х вых-х хар-к сис-мы при станд-х вых-х сиг-х. в кач-ве вх-х сиг-в примем единичный скачок. В кач-ве обобщ-х динам-х хар-к м. исп-ть изображения переходных хар-к:
S1(p)= ki(aip+di) / p(bip2+cip+li)(γip+1) (1)
C учетом передаточной матрицы объекта и вых-х хар-к (1) м. найти вектор операторов на входе в объект или вых-в рег-ра:
U(p)=[Wоб(p)]-1S(p)
П усть
сис-ма им-т стр-ю сх. изображ-ю на рис-ке:
усть
сис-ма им-т стр-ю сх. изображ-ю на рис-ке:
Если при синтезе сис-мы исп-ть скачкообр-е вх-е сигналы, то получаем:
ε(p)=(1/p)[I-S(p)]
Зная u(p) и ε(p) м. найти передаточную матрицу регулятора:
Wp(p)=[(1/p)I-S(p)]-1[Wоб(p)]-1
19. М-ДЫ ФАЗОВОЙ ТРАЕКТОРИИ ПРИ ИССЛЕД-И НЕЛИН-Х СИСТЕМ.
В
общем случае нелинейную
систему можно
описать системой нелинейных дифференциальных
уравнений в нормальной форме: ,
(3.18)
,
(3.18)
где xi – корд-ты сост-я системы; g(t) – задающее воздействие.
Для
систем с постоянными параметрами при
отсутствии задающего воздействия и не
нулевых начальных условиях
уравнение (3.18) перепишем в виде
 .
(3.19)
.
(3.19)
В пр-ве координат x1, … , xn можно представить графически реш-е в виде некот-й кривой, называемой фазовой траекторией.
Для
системы второго порядка:
 (3.20)
(3.20)
можно
исключить время и тогда
 .
(3.21)
.
(3.21)
Точки
равновесного состояния системы
определяются нулевыми значениями
скорости dx1/dt
= dx2/dt
= 0, что соответствует
 (3.22)
(3.22)
Точки равновесного состояния системы называются особыми точками на фазовой траектории. При переходе от области одной особой точки к области другой особой точки может существенно меняться поведение системы, что требует глубокого анализа нелинейной системы в зоне особых точек. В окрестности особых точек можно построить значительное число фазовых траекторий, семейство которых называют фазовым портретом.
Пусть имеем линейную систему второго порядка:

 (3.23)
(3.23)
Решение
этих ур-й имеет вид:
 (3.24)
(3.24)
и,
исключив t
из решения, имеем:
 .
(3.25)
.
(3.25)
Особая
точка для этой системы:
 .
(3.26)
.
(3.26)
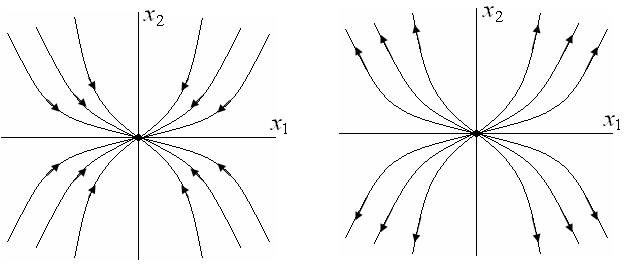
х2
х1
а)
б)
Рис. 3.11. Фазовые траектории для случаю веществ-х корней
одного знака: а) λ1 < 0, λ2 < 0; б) λ1 > 0, λ2 > 0

Рис. 3.12. Фазовые траектории для случая вещественных корней разного знака
Если
корни комплексные
 (3.27)
(3.27)
то фазовые траектории в зависимости от знака при коэффициенте α имеют следующий вид (рис. 3.13).
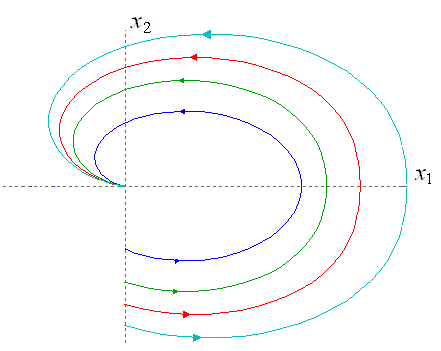
Рис. 3.13. Фазовые траектории при комплексных корнях: а) α < 0;
Если
корни чисто мнимые
 ,
(3.28), то
,
(3.28), то
 .
(3.29)
.
(3.29)
Возведем в квадрат x1 и x2 и, сложив получ-е уравнения, найдем:
 .
(3.30). Фазовые траектории, соотв-е данному
уравнению, имеют вид эллипсов (рис.
3.14).
.
(3.30). Фазовые траектории, соотв-е данному
уравнению, имеют вид эллипсов (рис.
3.14).
Приведенные фазовые портреты получили следующие названия: узел (рис. 3.11), седло (рис. 3.12), фокус (рис. 3.13), центр (рис. 3.14). Фазовые портреты узел и фокус подразделяются на устойчивые, если траектории стремятся к особой точке, и на не устойчивые, если траектории уходят от особой точки.

Рис. 3.14. Фазовые траектории для системы с мнимыми корнями
20. М-Д ГАРМОНИЧ-СКОЙ ЛИНЕАРИЗАЦИИ И ЕГО ИСП-Е ПРИ АНАЛИЗЕ И СИНТЕЗЕ СИСТЕМ УПР-НИЯ.
М-д гармонич. линеаризации-осн-н на том, что в силу фильтрующих или резонансных св-в сис-мы, дв-е в кот-ой близко к синусоидальному, при исследовании периодического режима м. принимать во внимание только основную гармонику. Пусть замкнутая с-ма состоит из нелин-го безынерционного эл-та с хар-ой: ξ=φ(σ) (1) и инерц-ой линейной части, описываемой комплексной ПФ Wл(jω). Если на вход нелин-го звена дей-т гармонический сигнал: σ = asinωt (2), то первая гармоника на выходе нелин-го эл-та: ξ=B1sinωt+A1cosωt (3), где B1, A1 опред-ся как коэф-ты ряда Фурье:


Обозначив B1/a=q(a) и A1/a=q’(a), перепишем (3) в виде ξ=q(a)asinωt+q’(a)acosωt (6). Учитывая, что asinωt=σ; acosωt=ρ/ω*σ, получим:
ξ =φ(σ)=[q(a)+q’(a) ρ/ω]σ (7)- гармоническая линеаризация, коэф-ты q(a); q’(a)-коэф-ты гарм-ой линеаризации. На основании (7) нах-м ПФ линеариз-го нелин-го эл-та:
Wн(a,p)=q(a)+q’(a) ρ/ω (8) и АФХ Wн(a)=q(a)+jq’(a) (9)
Используя подстановку ψ=ωt и формулы для выч-я B1 и A1:
 (10)
(10)
На основании (10) рассчит-т коэф-ты нелинейностей. Если нечетно-симметричная нелинейность однозначна, то:
q’=0, а φ(σ)=q(a)σ (11)
С труктурная
сх. линеаризованной сис-мы:
труктурная
сх. линеаризованной сис-мы:
По Найквисту: Wл(j𝛚)=-1/Wн(a)