

10.2. Технічна реалізація системи з підпорядкованим регулюванням
Регулятори струму і швидкості в системі з підпорядкованим регулюванням реалізують на базі операційних підсилювачів (рис.10.3).
Параметри силової частини електропривода (керованого випрям-ляча, двигуна і тахогенератора) будемо вважати відомим, бо вони розглядувались раніше. Тому необхідно на підставі передавальних функцій регуляторів розрахувати опори і ємності згідно рис.10.3.

Рис.10.3. Схеми регуляторів швидкості і струму
Згідно (10.6) для регулятора струму маємо:
![]() і
і
![]() .
(10.16)
.
(10.16)
Коефіцієнт зворотного зв’язку за струмом визначають із умови роботи привода у стопорному режимі (рис.10.2), для якого
![]() або
або
![]() ,
(10.17)
,
(10.17)
де
![]() – максимальна напруга на вході регулятора
стру-му. Коефіцієнт
– максимальна напруга на вході регулятора
стру-му. Коефіцієнт
![]() .
Якщо
згідно (10.17) більше
.
Якщо
згідно (10.17) більше
![]() ,
то необхідно використати давач струму
з коефіцієнтом передачі
,
то необхідно використати давач струму
з коефіцієнтом передачі
![]() .
.
За
відомого
в (10.16) три невідомих:
![]() ,
,
![]() і
і
![]() .
Тому, зазвичай, приймають
.
Тому, зазвичай, приймають
![]() .
Тоді
.
Тоді
![]() і
і
![]() .
.
Опір резистора в колі зворотного зв’язку за струмом визначають з рівняння
![]() або
або
![]() .
.
У
випадку П-регулятора швидкості
![]() і згідно (10.10)
і згідно (10.10)
![]() .
(10.18)
.
(10.18)
В
(10.18) два невідомі. Тому приймають,
наприклад,
![]()
![]() .
Тоді опір резистора в колі зворотного
зв’язку за швид-кістю визначають із
рівняння
.
Тоді опір резистора в колі зворотного
зв’язку за швид-кістю визначають із
рівняння
![]() .
(10.19)
.
(10.19)
Оскільки
![]() ,
то
,
то
![]() .
.
У випадку ПІ-регулятор швидкості згідно (10.14)
![]() і
і
![]() .
(10.20)
.
(10.20)
Прийнявши
![]() ,
,
![]() .
Тоді
.
Тоді
![]() і згідно (10.19)
.
і згідно (10.19)
.
10.3. Обмеження струму в системі підпорядкованого регулювання
Якщо
на вхід ПІ-регулятора подати стрибкоподібний
сигнал
![]() ,
то швидкість досягне усталеного значення
,
то швидкість досягне усталеного значення
![]()
![]() за час
за час
![]() з перерегулюванням
з перерегулюванням
![]() ,
Але струм перевищить допустиме значення
,
Але струм перевищить допустиме значення
![]() .
Тому необхідно передбачити обмеження
струму в перехідних процесах, що
досягає-ться обмеженням напруги на
виході регулятора швидкості стабіліт-ронами
.
Тому необхідно передбачити обмеження
струму в перехідних процесах, що
досягає-ться обмеженням напруги на
виході регулятора швидкості стабіліт-ронами
![]() і
(рис.10.3).
і
(рис.10.3).
Величину
напруги стабілізації
![]() визначають з рівняння
визначають з рівняння
![]() ,
(10.21)
,
(10.21)
де – стопорний струм (рис.10.2).
Окрім обмеження струму якоря в динамічних процесах шляхом обмеження напруги на виході регулятора швидкості, часто викорис-товують задавач інтенсивності (рис.10.1), за допомогою якого сиг-нал задання швидкості змінюється не стрибком, а лінійно в часі до необхідного значення.
а
б
Рис.10.4. Принципова схема задавача інтенсивності (а)
і його часові характеристики (б)
Задавач
інтенсивності (ЗІ) складається з
випрямляча В, транзис-тора VT і конденсатора
С (рис.10.4,а). Задаюча напруга
,
через випрямляч В подається в коло
колектора VT, який увімкнено за схемою
зі спільною базою. Емітерне коло живиться
від джерела стабілізованої напруги
.
У цій схемі включення транзистора струм
колектора
![]() практично не залежить від напруги на
колекто-рі. Тому при вмиканні напруги
процес зарядки конденсатора С відбувається
сталим струмом. Це призводить до того,
що напруга на конденсаторі, яка є вихідною
напругою ЗІ, практично змінюється в
часі лінійно від нуля до
практично не залежить від напруги на
колекто-рі. Тому при вмиканні напруги
процес зарядки конденсатора С відбувається
сталим струмом. Це призводить до того,
що напруга на конденсаторі, яка є вихідною
напругою ЗІ, практично змінюється в
часі лінійно від нуля до
![]() .
При зміні полярності
струм
завдяки випрямлячу В не змінює свого
напряму, але струм за-рядки конденсатора
при цьому змінює свій напрямок. Тому
поляр-ність вихідної напруги ЗІ завжди
співпадає зі полярністю задаючої.
.
При зміні полярності
струм
завдяки випрямлячу В не змінює свого
напряму, але струм за-рядки конденсатора
при цьому змінює свій напрямок. Тому
поляр-ність вихідної напруги ЗІ завжди
співпадає зі полярністю задаючої.
З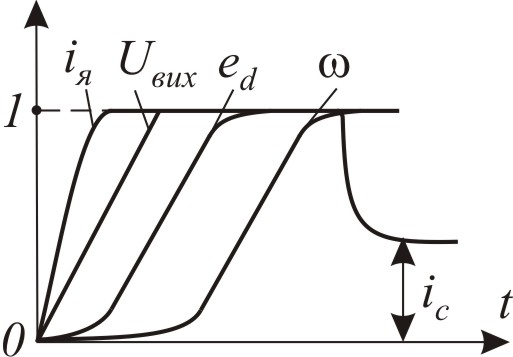 мінюючи
струм емітатора
мінюючи
струм емітатора
![]() резистором
резистором
![]() ,
можна змінювати інтенсивність наростання
вихідної напруги (рис.10.4,б) і тим самим
за-давати необхідне прискорення
елек-троприводу в процесах пуску і
галь-мування.
,
можна змінювати інтенсивність наростання
вихідної напруги (рис.10.4,б) і тим самим
за-давати необхідне прискорення
елек-троприводу в процесах пуску і
галь-мування.
З
Рис.10.5.
Графіки перехідних процесів в системі
з здавачем інтенсивності у відносних
одиницях![]() і швидкість двигуна
змінюються за законами, близькими до
лінійних. При цьому струм якоря
і швидкість двигуна
змінюються за законами, близькими до
лінійних. При цьому струм якоря
![]() спочатку швидко наростає до заданого
значення, після залишається сталим і
при швидкості,
близькій до усталеної, спадає до
спочатку швидко наростає до заданого
значення, після залишається сталим і
при швидкості,
близькій до усталеної, спадає до
![]() ,
де
– момент навантаження.
,
де
– момент навантаження.
Коли при усталеному русі електропривода різко зміниться мо-мент сил опору (ударне навантаження), то струм якоря може пере-вищити допустиме значення. Тому при використанні задавача інтен-сивності обов’язковим є обмеження напруги на виході регулятора швидкості.
Для перевірки правильності розрахунків проводять моделювання роботи системи в динамічних режимах методом, який описаний в розділі 9.3, з врахуванням способів обмеження струму. Окрім того, для отримання результатів, близьких до реальних, слід моделювати керований випрямляч як ланку з обмеженням ЕРС номінальним значенням.
Контрольні запитання
1. Яка умова вибору регулятора струму в системі підпорядкова-ного регулювання швидкості двигуна?
2. З якої умови визначають передавальну функцію регулятора струму в системі підпорядкованого регулювання?
3. Яка умова вибору регулятора швидкості в системі підпоряд-кованого регулювання?
4. За якої умови система підпорядкованого регулювання з П-ре-гулятором швидкості може забезпечити задану точність регулюван-ня в усталеному режимі?
5. На базі яких пристроїв реалізують регулятори струму і швид-кості в системах підпорядкованого регулювання?
6. З якої умови визначають коефіцієнт зворотного зв’язку за струмом?
7. З якої умови визначають коефіцієнт зворотного зв’язку за швидкістю?
8. Як здійснюється обмеження струму в системі підпорядковано-го регулювання?
9. З якою метою використовують задавач інтенсивності в системі підпорядкованого регулювання?
10. Чи буде обмежуватись струм при різкій зміні навантаження в системі автоматичного регулювання з здавачем інтенсивності?
Розділ 11