

1.4. Механічні характеристики виробничих механізмів і
електричних двигунів
Залежність
між приведеними до вала двигуна швидкістю
і мо-ментом сил опору виробничого
механізму
![]() називається механічною
характеристикою механізму.
називається механічною
характеристикою механізму.
Економічність роботи електродвигунів залежить від відповідно-сті механічної характеристики виробничого механізму механічній характеристиці двигуна.
Різні механізми мають різні механічні характеристики, але біль-шість з них можна представити наступною формулою:
![]() ,
(1.8)
,
(1.8)
д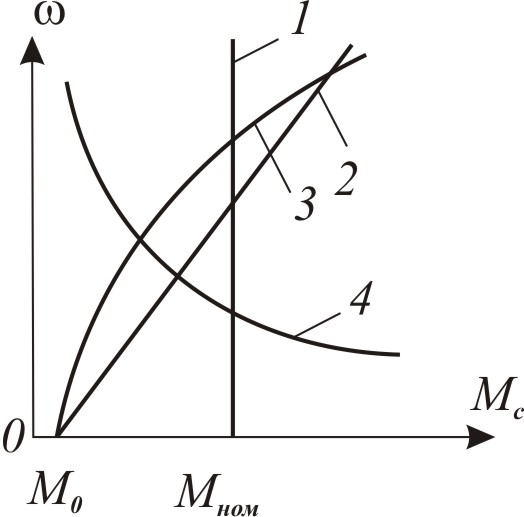 е
– момент сил опору при швидкості
е
– момент сил опору при швидкості
![]() ;
;
![]() – момент опору тертя в рухомих частинах
механізму;
– момент опору тертя в рухомих частинах
механізму;
![]() – момент сил опору при номінальній
швидкості
– момент сил опору при номінальній
швидкості
![]() ;
х
–
;
х
–
показник степеня, який показує зале-жність момента сил опору від швидкості.
Залежність (1.8) дозволяє визначити такі основні групи виробничих механізмів:
1. При х = 0
![]() ,
(1.9)
,
(1.9)
т
Рис. 1.4. Механічні
характеристи-ки виробних механізмів
2. При х = 1 механічна характеристика є лінійно-наростаючою (рис.4, пряма 2) і описується рівнянням
![]() .
(1.10)
.
(1.10)
Таку характеристику має генератор постійного струму незалежного збудження, який працює на сталий електричний опір.
3.
При х
= 2
![]() є нелінійною (рис.1.4, крива 3). Її рівняння
є нелінійною (рис.1.4, крива 3). Її рівняння
 .
(1.11)
.
(1.11)
Таку характеристику мають вентилятори, відцентрові помпи, гребні гвинти та інші механізми. Її часто називають вентиляторною або параболічною характеристикою.
4.
При х
= -1
![]() .
(1.12)
.
(1.12)
Залежність
(1.12) має вид гіперболи і вона характерна
для моталок, момент на валу яких
![]() ,
розточних,
фрезерних та інших верстатів (рис.1.4,
крива 4).
,
розточних,
фрезерних та інших верстатів (рис.1.4,
крива 4).
Для
таких механізмів як мішалки, млини,
дробарки та інші показник х
знаходиться в межах
![]() в
залежності від механіч-них властивостей
матеріалу.
в
залежності від механіч-них властивостей
матеріалу.
Механічною
характеристикою електродвигуна
називається за-лежність швидкості від
обертового електромагнітного моменту
![]()
![]() .
Всі електродвигуни, крім синхронного,
мають здатність зменшувати швидкість
зі збільшенням моменту навантаження.
Але ступінь
зміни
швидкості
різна і її оцінюють за величиною
жорсткос-ті механічної характеристики.
.
Всі електродвигуни, крім синхронного,
мають здатність зменшувати швидкість
зі збільшенням моменту навантаження.
Але ступінь
зміни
швидкості
різна і її оцінюють за величиною
жорсткос-ті механічної характеристики.
Жорсткість механічної характеристики електропривода – це відношення різниці електромагнітних моментів, які розвиває дви-гун, до відповідної різниці швидкостей, як показано на рис.1.5, тобто
![]() .
(1.13)
.
(1.13)
На
робочій ділянці характеристики
![]() жорсткість від’ємна
жорсткість від’ємна
![]() .
Якщо характеристика лінійна, то жорсткість
стала
.
Якщо характеристика лінійна, то жорсткість
стала
![]() .
При нелінійній залежності
жорсткість не є сталою і її визначають
у кожній точці як похідну моменту від
швидкості:
.
При нелінійній залежності
жорсткість не є сталою і її визначають
у кожній точці як похідну моменту від
швидкості:
![]() .
(1.14)
.
(1.14)
Поняття жорсткості використовують і для оцінки механічних характеристик виробничих механізмів. Тоді
![]() або
або
![]() .
(1.15)
.
(1.15)
В залежності від жорсткості механічні характеристики поді-ляють на чотири основні групи:
1.
Абсолютна жорстка
механічна характеристика
![]() – це характеристика, коли швидкість зі
зміною момента не змінються. Таку
характеристику мають синхронні двигуни
(пряма 1 на рис.1.5).
– це характеристика, коли швидкість зі
зміною момента не змінються. Таку
характеристику мають синхронні двигуни
(пряма 1 на рис.1.5).
2. Жорстка механічна характеристика характеризується малим зменшенням швидкості при збільшенні моменту (крива 2 на рис.1.5). Таку характеристику мають двигуни постійного струму незалежного збудження та асинхронні двигуни на робочій частині характеристики (пряма 2 на рис.1.5).
3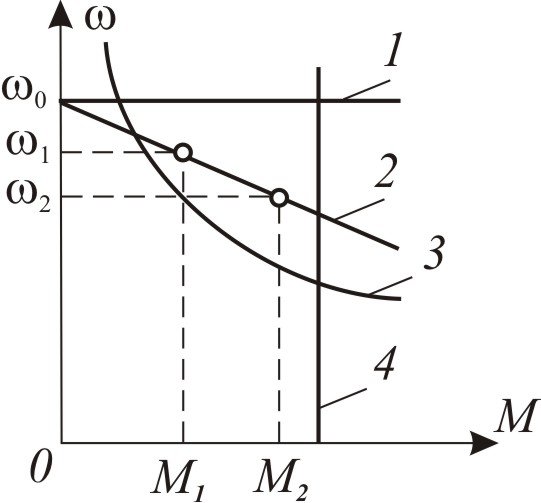 .
Мягка
механічна
характе-ристика характеризується тим,
що зі зміною моменту значно змі-нюється
швидкість. Таку характе-ристику мають
двигуни постій-ного струму послідовного
збуд-ження (крива 3 на рис.1.5).
.
Мягка
механічна
характе-ристика характеризується тим,
що зі зміною моменту значно змі-нюється
швидкість. Таку характе-ристику мають
двигуни постій-ного струму послідовного
збуд-ження (крива 3 на рис.1.5).
4
Рис.1.5.
Механічні характеристики
електричних
двигунів![]() .
Таку механічну характе-ристику мають
двигуни постійно-го струму при живленні
їх від джерела струму або при роботі в
системах стабілізації моменту (пряма
4 на рис.1.5).
.
Таку механічну характе-ристику мають
двигуни постійно-го струму при живленні
їх від джерела струму або при роботі в
системах стабілізації моменту (пряма
4 на рис.1.5).