

Р
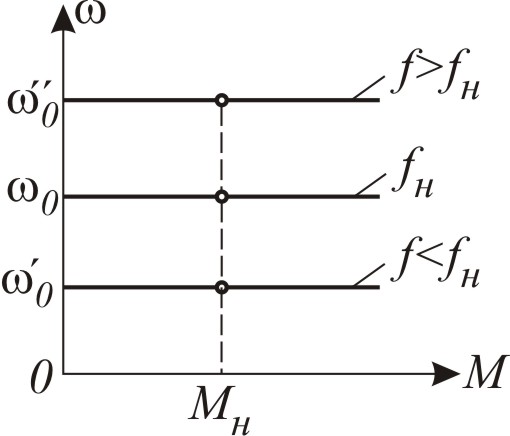
Рис.5.16.
Механічні характерис-Тики синхронного двигуна
 егулювання
швидкості
синхронних двигунів здійснюють лише
зміною частоти живлення, як вверх від
основної швидкості, так і вниз. Регулювання
швидкості зміною числа пар полюсів
обмотки статора неможливо, бо ротор має
стале число полюсів. Оскільки швидкість
синхро-нного двигуна не залежить від
напру-ги, то напругу змінюють лише при
пуску потужних двигунів з метою обмеження
пускового струму. При цьому процес пуску
синхронного двигуна такий же як і
асинхронного.
егулювання
швидкості
синхронних двигунів здійснюють лише
зміною частоти живлення, як вверх від
основної швидкості, так і вниз. Регулювання
швидкості зміною числа пар полюсів
обмотки статора неможливо, бо ротор має
стале число полюсів. Оскільки швидкість
синхро-нного двигуна не залежить від
напру-ги, то напругу змінюють лише при
пуску потужних двигунів з метою обмеження
пускового струму. При цьому процес пуску
синхронного двигуна такий же як і
асинхронного.
Процеси,
які протікають в синхронному двигуні
при зміні часто-ти за умови
![]() ,
аналогічні відповідним процесам в
асинхронному двигуні з короткозамкненим
ротором. Тому при регулюванні швидкості
співвідношення між частотою і напругою
будуть такими же. Регулювання швидкості
частотою є
двозонним;
механічні характеристики абсолютно
жорсткі, діапазон регулювання практично
необмежений (рис.5.16).
,
аналогічні відповідним процесам в
асинхронному двигуні з короткозамкненим
ротором. Тому при регулюванні швидкості
співвідношення між частотою і напругою
будуть такими же. Регулювання швидкості
частотою є
двозонним;
механічні характеристики абсолютно
жорсткі, діапазон регулювання практично
необмежений (рис.5.16).
Частотне
керування, будучи фактично єдиним
способом регулю-вання швидкості
синхронних двигунів, характеризується
такими же показниками, що і частотно-керовані
асинхронні двигуни з коротко-замкненим
ротором, але дозволяє регулювати
коефіцієнт потужнос-ті, що є його основною
перевагою. Додатковою перевагою є
можли-вість регулювання струмом збудження
максимального момента: за
![]() збільшення струму збудження збільшує
і одночас-но збільшується коефіцієнт
потужності
.
Окрім того, за жив-лення обмотки статора
напругою прямокутної форми можна
здійс-нювати покроковий режим роботи
з електромагнітною фіксацією положення
ротора.
збільшення струму збудження збільшує
і одночас-но збільшується коефіцієнт
потужності
.
Окрім того, за жив-лення обмотки статора
напругою прямокутної форми можна
здійс-нювати покроковий режим роботи
з електромагнітною фіксацією положення
ротора.
5.5. Гальмівні режими двигунів змінного струму
Способи гальмування асинхронних і синхронних двигунів різні. Гальмування асинхронних двигунів, як і двигунів постійного стру-му незалежного збудження, можна здійснювати гальмування з від-дачею енергії в мережу, динамічним гальмуванням і гальмуванням противмиканням.
Г
Рис.5.17. Механічні
характеристики при гальмуванні з
віддачею енергії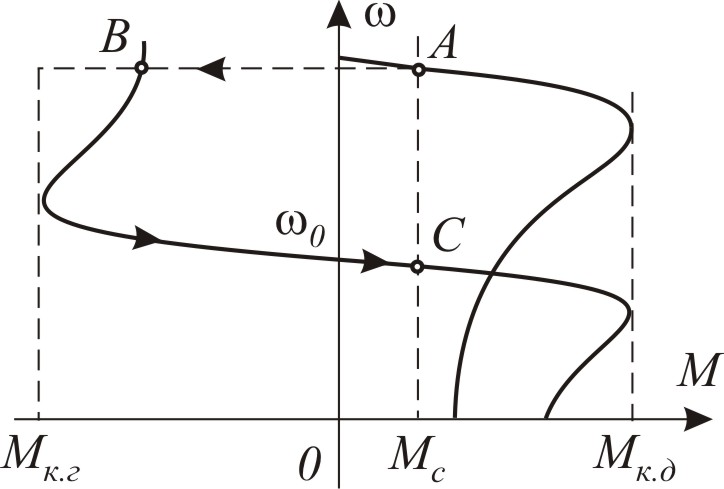 альмування
з віддачею енергії в мережу
використо-вують при переході з вищої
швидкості на нижчу, напри-лад, при зміні
числа пар по-люсів (рис.5.17). Коли швид-кість
альмування
з віддачею енергії в мережу
використо-вують при переході з вищої
швидкості на нижчу, напри-лад, при зміні
числа пар по-люсів (рис.5.17). Коли швид-кість
![]() ,
двигун працює в режимі генератора
парале-льно з мережею, якій віддає
електричну енергію, рівну
,
двигун працює в режимі генератора
парале-льно з мережею, якій віддає
електричну енергію, рівну
![]() за вираху-ванням втрат. При цьому він
споживає реактивну потужність для
збудження. Цей процес відбувається на
ділянці механічної характе-ристики
за вираху-ванням втрат. При цьому він
споживає реактивну потужність для
збудження. Цей процес відбувається на
ділянці механічної характе-ристики
![]() .
.
Динамічне гальмування зв’язано з живленням обмотки статора постійним струмом. Для переходу з режиму двигуна у гальмівний режим контактором К1 відключають обмотку статора від мережі, а контактором К2 подають постійну напругу такої величини, щоби постійний струм створював намагнічуючу силу, еквіваленту намаг-нічуючій силі змінною струму (рис.5.18,а).
Постійний струм в обмотці статора створює нерухоме магнітне поле, основна гармоніка якого зумовлює синусоїдний закон розпо-ділу індукції. В роторі, що обертається під дією сили інерції, інду-кується струм, який створює магнітне поле, нерухоме відносно ста-тора.
а
б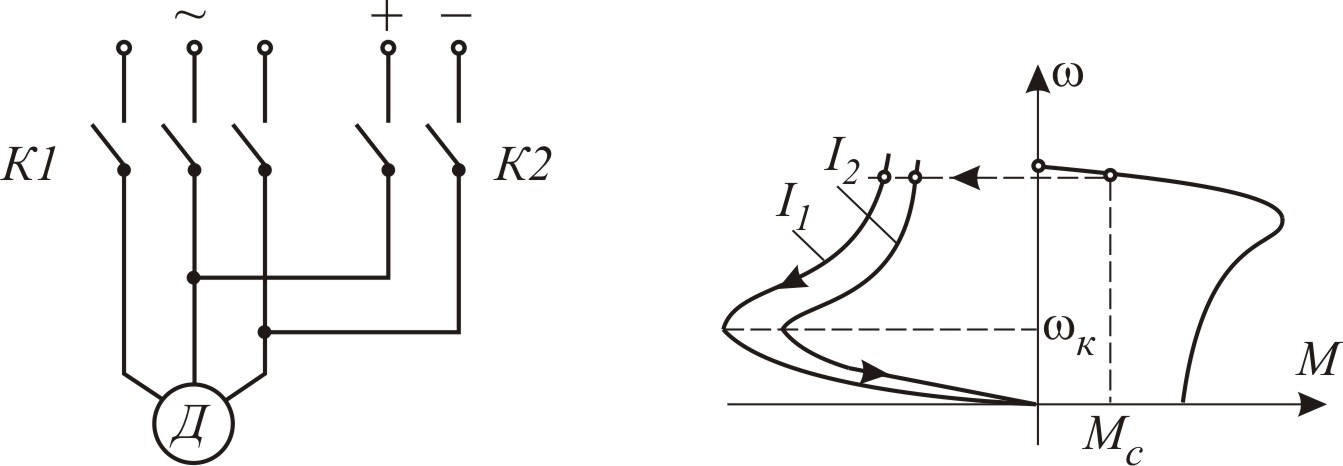
Рис.5.18. Схема включення (а) і механічні характеристики (б) асинхронного двигуна з короткозамкненим ротором в режимі динамічного гальмування
Взаємодія
цих магнітних полів спричиняє гальмівний
мо-мент, який залежить від величини
постійного струму і швидкості обертання
ротора. При цьому максимальний момент
пропорційний квадрату струму статора,
а критичне ковзання є сталим. На рис.5.18,б
наведено характеристики для двох значень
струму
![]() .
.
Гальмування
противмиканням
досягається шляхом переклю-чення на
ходу двох фаз обмотки статора, що
призводить до зміни направлення обертання
магнітного поля статора (перехід з
точками
![]() в точку А на рис.5.19). Ротор при цьому
обертається проти магнітного поля і
гальмується. Коли швидкість знизиться
до нуля, двигун відмикають від мережі.
Якщо цього не зробити, то двигун почне
розганятися у протилежну сторони –
відбувається його реверс.
в точку А на рис.5.19). Ротор при цьому
обертається проти магнітного поля і
гальмується. Коли швидкість знизиться
до нуля, двигун відмикають від мережі.
Якщо цього не зробити, то двигун почне
розганятися у протилежну сторони –
відбувається його реверс.
Г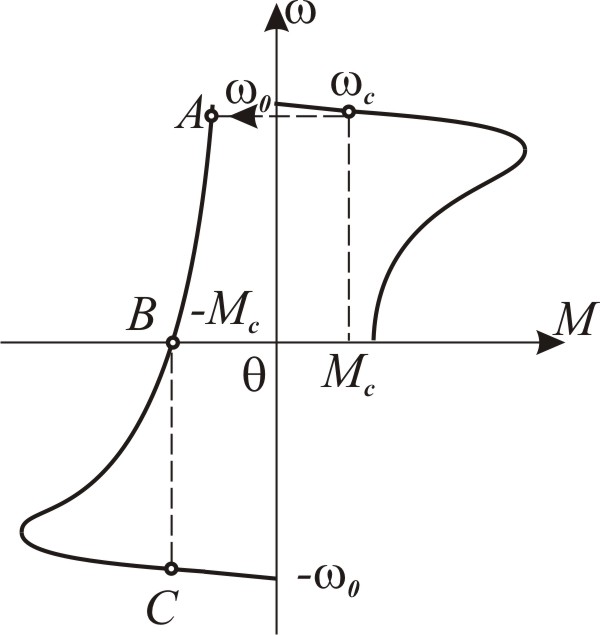 альмування
противмиканням двигунів з короткозамкненим
ро-тором супроводжується великим
струмом, бо двигун споживає по-тужність
з мережі і одночасно перетворює кінетичну
енергію систе-ми у електричну. Гальмування
відбувається дуже швидко і викорис-товується,
в основному, у реверсивних електроприводах.
альмування
противмиканням двигунів з короткозамкненим
ро-тором супроводжується великим
струмом, бо двигун споживає по-тужність
з мережі і одночасно перетворює кінетичну
енергію систе-ми у електричну. Гальмування
відбувається дуже швидко і викорис-товується,
в основному, у реверсивних електроприводах.
У
Рис.5.19. Механічні
характеристики при гальмуванні
противмиканням
Г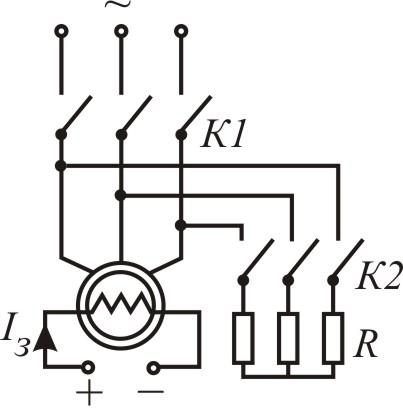 альмування
синхронних двигунів
при сталій частоті напруги живлення
здійснюють шляхом динамічного гальмування,
при якому обмотку статора контактором
К1 відмикають від мережі і замикають
контакто-ром К2 на резистори R (рис.5.20).
Механічні характеристики при
цьому
подібні
до
механічних
характеристик
асинхронного
двигуна
в режимі динамічного гальмування
(рис.5.18,б).Інтенсивність гальмування
залежить від опору резисторів і струму
збудження.
альмування
синхронних двигунів
при сталій частоті напруги живлення
здійснюють шляхом динамічного гальмування,
при якому обмотку статора контактором
К1 відмикають від мережі і замикають
контакто-ром К2 на резистори R (рис.5.20).
Механічні характеристики при
цьому
подібні
до
механічних
характеристик
асинхронного
двигуна
в режимі динамічного гальмування
(рис.5.18,б).Інтенсивність гальмування
залежить від опору резисторів і струму
збудження.
В
Рис.5.20. Принципова
схема
включення
СД в режимі дина-
мічного гальмування
Контрольні запитання і задачі
1. З якого рівняння можна визначити способи регулювання шви-дкості асинхронних двигунів з короткозамкненим і фазним рото-ром?
2.
Визначити критичне ковзання асинхронного
двигуна з корот-козамкненим ротором,
якщо
![]() і
і
![]() .
.
3. Якщо напруга живлення асинхронного двигуна зменшиться на 10%, то як зміниться його момент?
4. Чи буде змінюватись критичне ковзання при зміні напруги живлення асинхронних двигунів?
5. Яким повинно бути відношення напруги до частоти у випадку частотного регулювання швидкості асинхронного двигуна, якщо момент навантаження ?
6. У чому відмінність автономного інвертора напруги від автоно-много інвертора струму в частотних перетворювачах?
7. Як здійснюється пуск синхронних двигунів?
8. Від чого залежить момент синхронного двигуна?
9. Як здійснюють регулювання коефіцієнта потужності синхрон-них двигунів?
10. Якими способами можна гальмувати асинхронний двигун з короткозамкненим ротором?
Розділ 6