

Замкнутые устройства синхронизации
Структурные схемы. Замкнутые УС с непосредственным воздействием на местный генератор можно разделить на два вида:
— устройства с релейным управлением, в которых УУ изменяет управляющий сигнал Uупр время от времени. В промежутках управляющий сигнал остается постоянным и не зависит от величины рассогласования фаз синхроимпульсов и информационных сигналов;
— устройства с плавным управлением , в которых УУ непрерывно действует на генератор, а управляющий сигнал Uупр пропорционален величине рассогласования фаз.
Структурная схема УС с релейным управлением приведена на рисунке 1.3, а временные диаграммы его работы на рисунке 1.4. На ФД с одной стороны поступают информационные сигналы, а с другой стороны — синхросигналы (тактовые колебания) от местного генератора (точка Г). В схеме использован ФД, работающий на импульсном принципе. Информационные сигналы проходят дифференциальную цепочку ДЦ, а затем выпрямляются (точки Б и В). Полученные короткие импульсы, соответствующие моментам смены полярности в принимаемом сигнале, подаются на две схемы совпадения И1 и И2. На вторые входы этих схем подаются прямоугольные тактовые колебания от местного задающего генератора (на одну из схем И — через инвертор). В этих колебаниях переходы от отрицательной полярности к положительной должны совпадать с короткими импульсами в точке В. Если местные колебания отстают по фазе от принимаемого сигнала (рисунок 1.4 диаграмма Г), то короткие импульсы пройдут на выход одной схемы совпадения, например, И1. Если местные колебания опережают по фазе, то короткие импульсы пройдут на выход другой схемы — И2. Эти короткие импульсы образуют сигнал Uрф, характеризующий знак расхождения фаз.
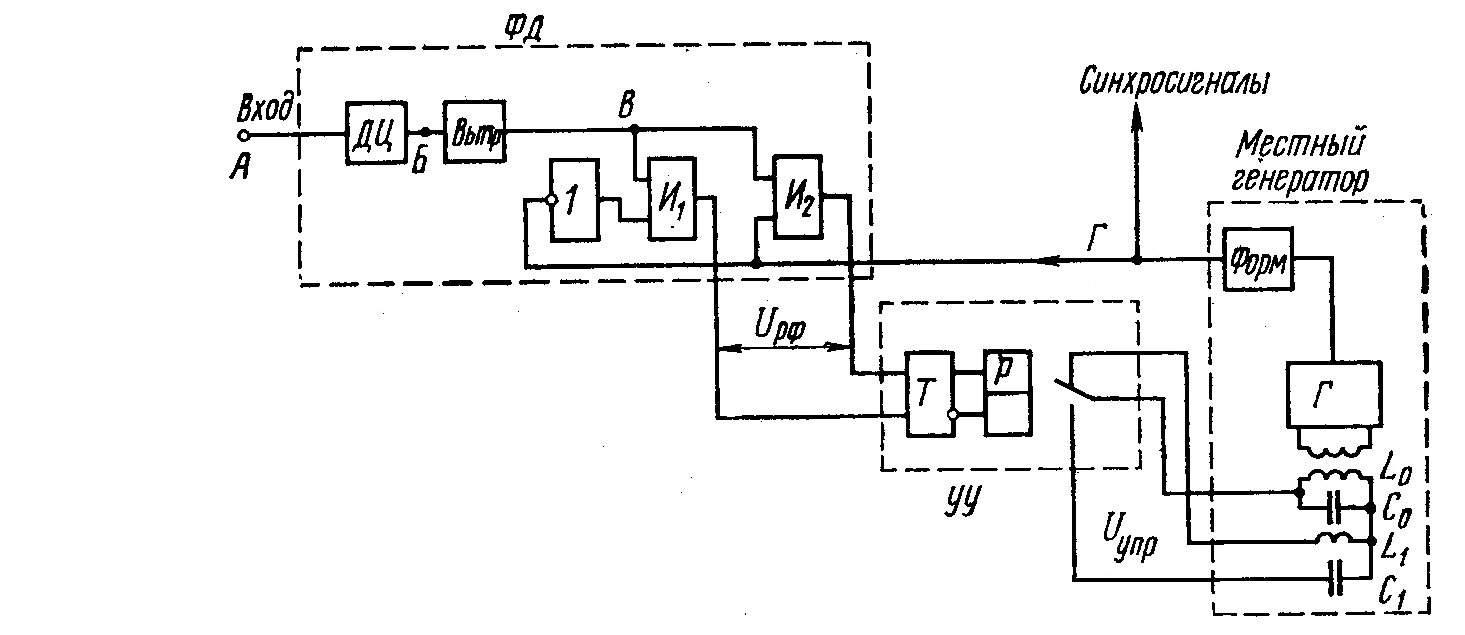
Рисунок Функциональная схема устройства с релейным управлением
Особенностью УС с релейным управлением является управляющее устройство (УУ), которой может иметь ограниченное количество положений. В зависимости от того, какая из схем (И или И) выдала пульс, триггер Т установится в то или иное положение. Реле, управляемое триггером, подключит к резонансному контуру индуктивности L1 (эти переключения образуют управляющий сигнал Uупр). Генератор будет выдавать соответственно нижнюю или верхнюю частоту (f 1 или f2). Номинальное значение частоты f1 должно быть несколько ниже, а частоты f2 — несколько выше номинального значения тактовой частоты принимаемых единичных элементов fт. С учетом возможной нестабильности генераторов передатчика и приемника обычно выбирают следующую девиацию частоты:
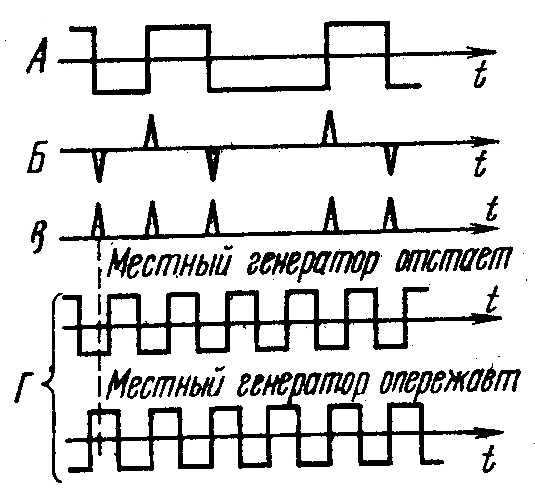
Рисунок Временные диаграммы работы устройства
С релейным управлением (показана для точек А, Б, В
и Г схемы на рисунке Предыдущем)
где kпер, kпр — коэффициенты нестабильности генераторов соответственно передатчика и приемника. Таким образом, зависимость частоты от величины расхождения фаз будет иметь ступенчатый характер (рисунок 1.5а). Ширина прямоугольного участка этой характеристики определяется конечной чувствительностью управляющей схемы (триггера и реле). Графики изменения частоты и фазы тактового колебания во времени для такого устройства показаны на рисунке 1.5б.
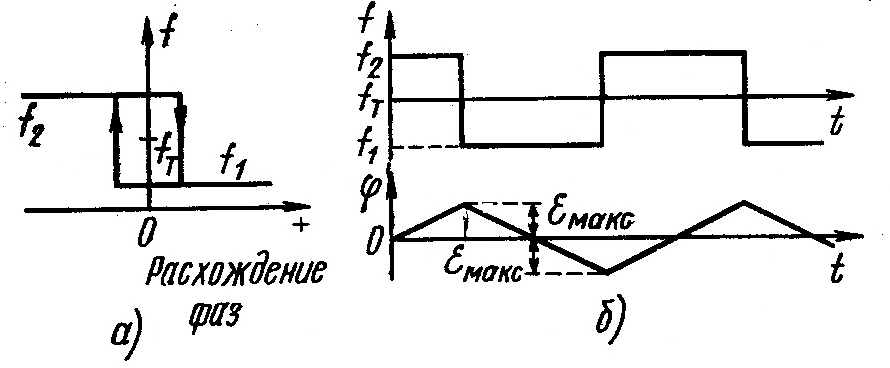
Рисунок Характеристики двухпозиционного
устройства с релейным управлением:
а — зависимость частоты от расхождения фаз;
б — изменение частоты фазы во времени
Рассмотренное двухпозиционное устройство имеет следующий недостаток: во время перерыва связи или длительной передачи информационных элементов одного и того же знака расхождение по фазе будет непрерывно возрастать, так как частота генератора заведомо отличается от средней частоты на величину девиации. Этот недостаток отсутствует в трехпозиционном устройстве. Генератор, кроме частот f1 и f2, должен иметь также среднюю частоту f0=(f1+f2)/2, настраиваемую на частоту генератора передачи (или номинальную тактовую частоту). В этом случае расхождение генераторов по фазе при обрыве канала будет обусловлено только неточностью настройки частот генераторов и их собственной нестабильностью (рисунок 1.6).
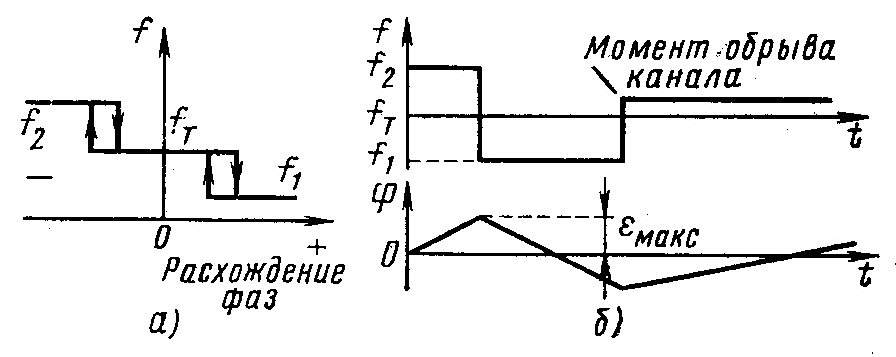
Рисунок Характеристики трехпозиционного
устройства с релейным управлением:
а — зависимость частоты от расхождения фаз;
б — изменение частоты фазы во времени
Устройства с плавным управлением отличаются от устройств с релейным управлением лишь управляющим устройством, которое должно обеспечивать плавное изменение частоты генератора в зависимости от величины расхождения фаз. Эта зависимость обычно имеет примерно линейный характер (рисунок 1.7а). Для управления частотой генератора используют какой-либо управляемый реактивный элемент, например варикап (конденсатор, емкость которого зависит от величины приложенного напряжения). Изменение частоты генератора (а следовательно, и фазы) во времени будет иметь плавный характер (рисунок 1.7). Благодаря этому можно добиться высокой точности поддержания синфазности. При правильно подобранном инерционном элементе достигается точность ±(1-2)% длительности единичного элемента. В этом состоит основное преимущество УС с плавным управлением.
Общим недостатком всех устройств синхронизации с непосредственным действием на генератор (по сравнению с устройствами без непосредственного действия) являются следующие: снижение стабильности генератора примерно в 10 раз вследствие воздействия на один из его параметров; невозможность использования одного генератора для работы нескольких УС; устройства синхронизации с непосредственным воздействием на генератор применяются тогда, когда требуется простота схемы или когда устройства без непосредственного воздействия на генератор трудно реализовать, например, при высоких скоростях модуляции.
В устройствах синхронизации без непосредственного воздействия на генератор фаза подстраивается в промежуточном преобразователе ПП, через который проходит местное тактовое колебание. В качестве промежуточного преобразователя чаще всего используется делитель частоты следования импульсов. Устройства синхронизации с делителем частоты возможно реализовать целиком на дискретных элементах, что упрощает их изготовление, настройку и эксплуатацию. Часто такие устройства называют устройствами с дискретным управлением (или дискретными устройствами синхронизации). Принцип изменения фазы в процессе деления частоты можно пояснить, пользуясь рисунком 1.8а. Генератор вырабатывает колебание высокой частоты, в m раз больше тактовой частоты: fв.ч.=mfт. Величину m называют коэффициентом деления делителя. Формирователь превращает синусоидальное колебание в последовательность импульсов с частотой следования fв.ч. Далее последовательность импульсов делится на m, например, делителем в виде цепочки из двоичных счетчиков. Процесс деления иллюстрируется временной диаграммой, представленной на рисунке 1.8б. На рисунке изображены исходная последовательность импульсов с частотой fв.ч и получаемая на выходе тактовая последовательность с частотой fт. Коэффициент деления m=8. При этом на выход выдается каждый восьмой импульс входной последовательности импульсов.
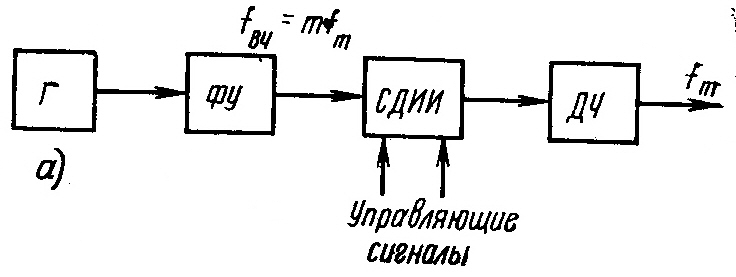
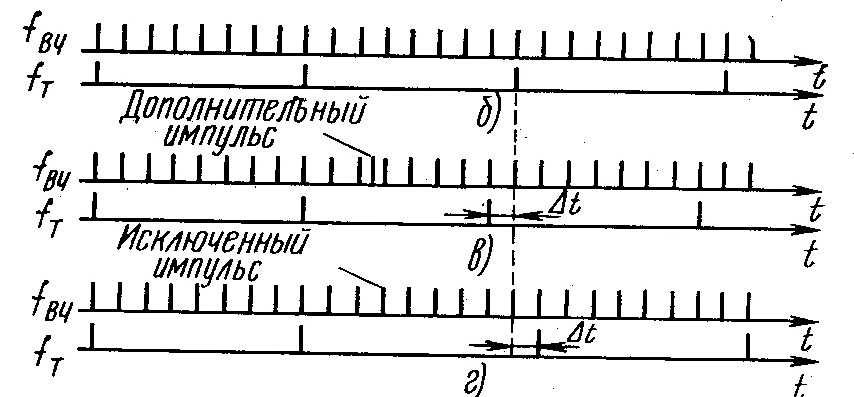
Рисунок К принципу изменения в процессе деления частоты:
а — структурная схема деления частоты;
б — нормальный процесс деления на 8;
в — добавление импульса;
г — исключение импульса.
Если на вход делителя подать дополнительный импульс через схему добавления и исключения импульсов (СДИИ), то фаза выходных импульсов (рисунок 1.8в) сместится в сторону опережения на величину, равную периоду колебаний генератора: Δt=1/ fв.ч. Дополнительные импульсы не должны совпадать по времени с импульсами высоко-частотного генератора. Если один из импульсов, подаваемых на делитель, исключить, то фаза выходных импульсов сместится на ту же величину Δt в сторону отставания (рисунок 1.8г). Таким образом, путем добавления и исключения импульсов легко изменять фазу тактовой последовательности в нужную сторону.
Пример УС с дискретным управлением показан на рисунке 1.9. На выходе генератора с формирователем образуется последовательность импульсов с частотой fв.ч.=2 mfт. Затем делитель на 2 образует две последовательности импульсов fв.ч.=mfт, сдвинутых друг относительно друга на полтакта. Одна из последовательностей подается через схему запрета в делитель частоты на m. Полученная тактовая частота подается на фазовый дискриминатор (на схемы И1 и И2 подаются тактовые последовательности, сдвинутые друг относительно друга на полтакта). Действие ФД было рассмотрено при рассмотрении ранее. При синфазности между принимаемыми сигналами и местными тактовыми колебаниями импульсы на выходах фазового дискриминатора отсутствуют. При появлении расфазировки короткие импульсы появляются на выходе схемы И1 или схемы И2 в зависимости от знака расхождения фазы. Если импульс появится на выходе И1, то он откроет схему И3, которая пропустит один импульс с выхода делителя на 2 на вход делителя на m. Этот импульс будет расположен в середине между основными импульсами, проходящими через схему запрета. Под действием этого дополнительного импульса фаза тактовой последовательности сдвинется в сторону опережения на один шаг Δt. Если же импульс появится на выходе схемы И2, то он закроет схему запрета и таким образом исключит один импульс на входе делителя. В результате фаза тактовой последовательности сдвинется на один шаг Δt в сторону отставания.
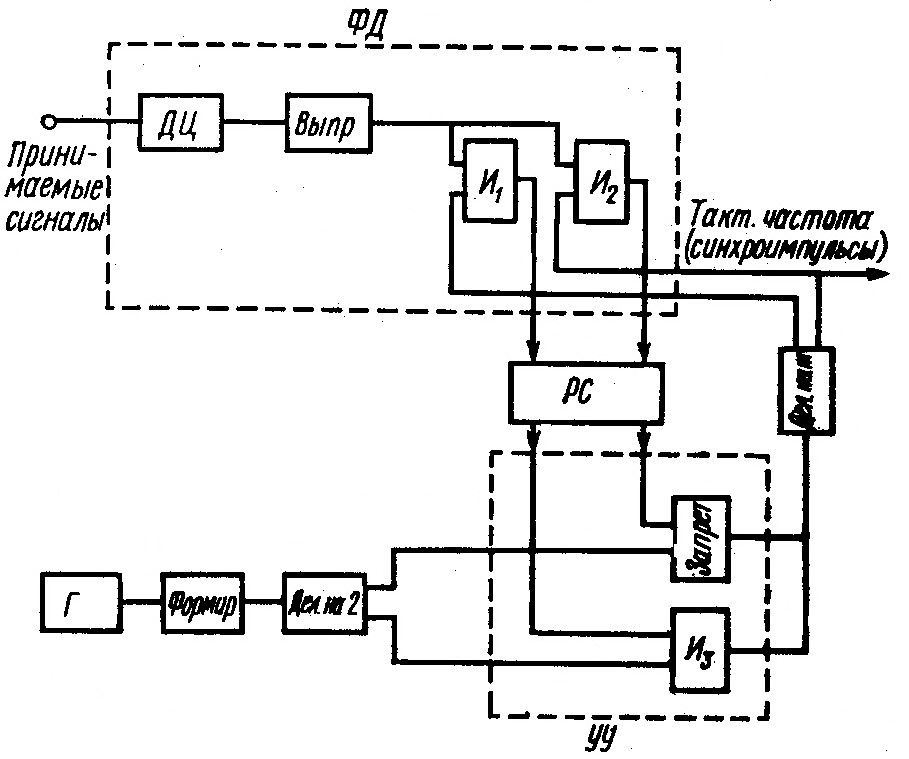
Функциональная схема устройства
синхронизации без непосредственного
воздействия на генератор