

3. Объект и средства исследования
1. Моделирующий пакет MatLAB + пакет расширения Simulink.
2. IBM - совместимый персональный компьютер с процессором Intel Celeron 333(и выше) и операционной системой Windows 9x или Windows XP. Для создания отчета в автоматическом режиме необходима установленная программа MS Word 97, 2000, XP.
3. Cхемы (файлы lab26.mdl и lab26_1.mdl):
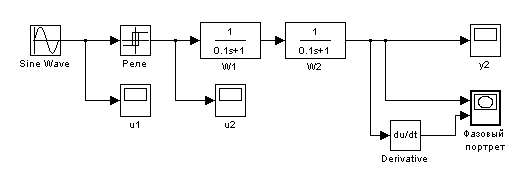
Рис. 8. Схема моделирования для экспериментального определения амплитудно-амплитудной характеристики нелинейного элемента
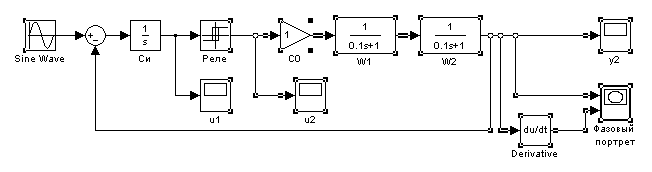
Рис. 9. Схема моделирования замкнутой нелинейной CAP третьего порядка
4. Порядок проведения эксперимента
1. Задать следующие значения постоянных параметров линейного фильтра:
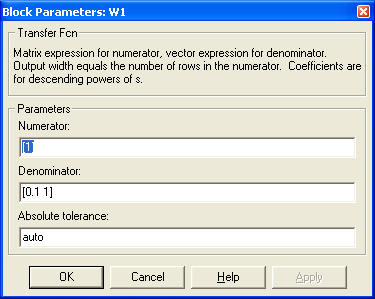
Рис.10. Настройка параметров элемента W1

Рис.11. Настройка параметров элемента W2
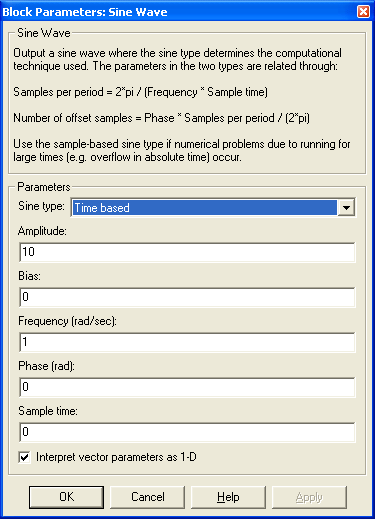
Рис.12. Настройка параметров генератора синусоидальных сигналов
2. Подключить осциллограф к выходу нелинейного элемента (точка U2). Наблюдать процесс преобразования гармонического сигнала на нелинейном элементе. Занести график в отчет.
3. Зарегистрировать процесс преобразования гармонического сигнала нелинейным элементом с помощью графопостроителя. Занести график в отчет.
4. Уменьшая амплитуду гармонического сигнала, подаваемого c генератора, c дискретностью в 1 В, снять амплитудно-амплитудную характеристику.
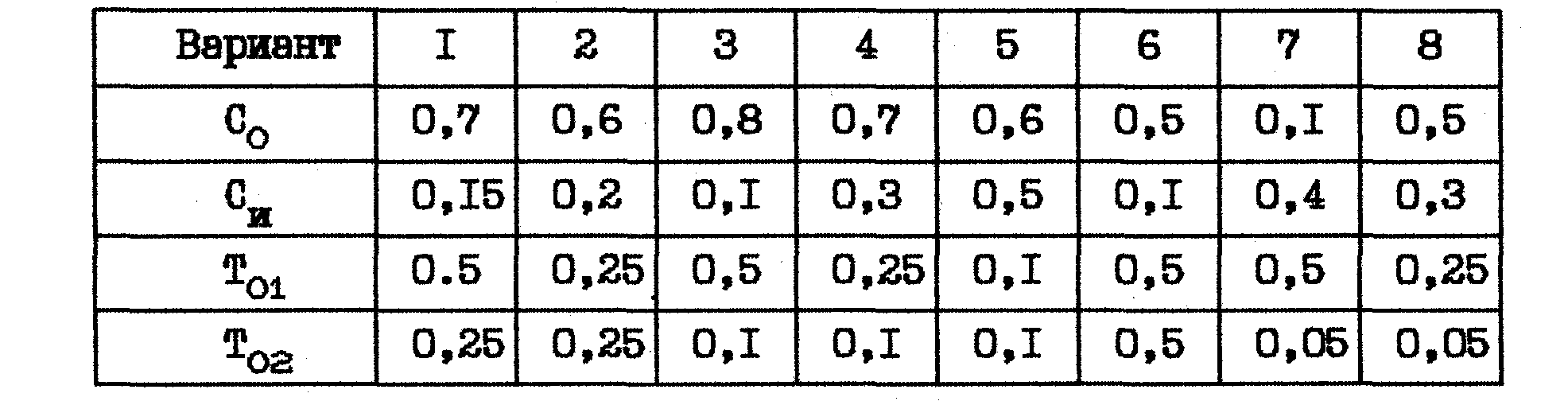
5. Перейти к схеме моделирования замкнутой нелинейной CAP третьего порядка (рис.9). Значения параметров линейной части системы задать в соответствии с табл.3.
Таблица 3
6. Пронаблюдать переходные и колебательные процессы при различных
начальных условиях: -10 В, О В, +10 В. Результаты занести в отчет.
5. Обработка результатов эксперимента
Отчет по лабораторной работе должен содержать:
1) структурные схемы моделирования (рис. 8, 9);
2) полученные теоретически и экспериментально графики амплитудно-амплитудных характеристик для реле;
3) полученные теоретически и экспериментально параметры автоколебаний в нелинейных CAP третьего порядка;
4) выводы.
6. Контрольные вопросы
1. В чем заключаются особенности работы СAP в режиме больших рассогласований?
2. В чем состоит смысл гармонической линеаризации?
3. Когда применяется гармоническая линеаризация?
4. В чем заключаются особенности гармонической линеаризации однозначных статических нелинейностей?
5. Каковы особенности эквивалентных частотных характеристик нелинейных элементов?
6. В чем состоит необходимое условие существования автоколебаний в нелинейной системе?
7. Каков физический смысл условий баланса амплитуд и фаз?
8. Как исследовать устойчивость автоколебаний?
9. Каким образом могут быть определены параметры симметричных автоколебаний?
7. Библиографический описок
1. Бесекерский В. А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1975. - 767 с.
2. Попов Е.П. Теория нелинейных систем автоматического регулирования и управления. - М.: Наука, 1979. - 256 с.
3. Топчеев Ю.И. Атлас для проектировании систем автоматического регулирования. - М.: Машиностроение, 1989. -752 с.
4. Теория автоматического управления. 4.11. Теория нелинейных и специальных систем автоматического управления / Под. ред. А. А. Воронова. Учеб. пособие для вузов. - М. :Высш. школа, 1977. - 288 с.
5. Иващенко Н.Н. Автоматическое регулирование. Теория и алементы систем. - М.: Машиностроение, 1978. - 736 с.
6. Теория автоматического управления / Под ред. А.С.Шаталова. Учеб. пособие для вузов. - М.:Высш. школа, 1977. -448 с.
7. Воронов А. А. Основы теории автоматического управления:
особые линейные и нелинейные системы. - М. :Энергоиздат, 1981. -301 с.
8. Цыпкин Я.З. Основы теории автоматических систем. Учеб. пособив для студ. вузов. - М. :Наука, 1977. - 560 с.
9. Сборник задач по теории автоматического регулирования и управления / Под ред. В. А. Бесекерского. - М.: Наука, 1978. -512 о.