

ЛАБОРАТОРНАЯ РАБОТА № 26
ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ СAP ПРИ СИММЕТРИЧНЫХ КОЛЕБАНИЯХ
I. Цель работы
Изучить поведение систем автоматического регулирования (CAP) в режиме больших рассогласований, метода их исследования при симметричных колебаниях, способы моделирования нелинейных CAP.
2. Основы теории
В ряде случаев исследование системы в линейном приближении может привести к ложным результатам. Это связано прежде всего с тем, что такое приближение дает представление об устойчивости и качестве системы "в малом", т.е. при небольших изменениях управляющего воздействия и небольших возмущениях. Большие же изменения управляющего и возмущающего воздействий могут привести к возникновению автоколебаний, причиной которых может быть, например, наличие насыщения в усилительно-преобразовательном тракте системы (рис.1).
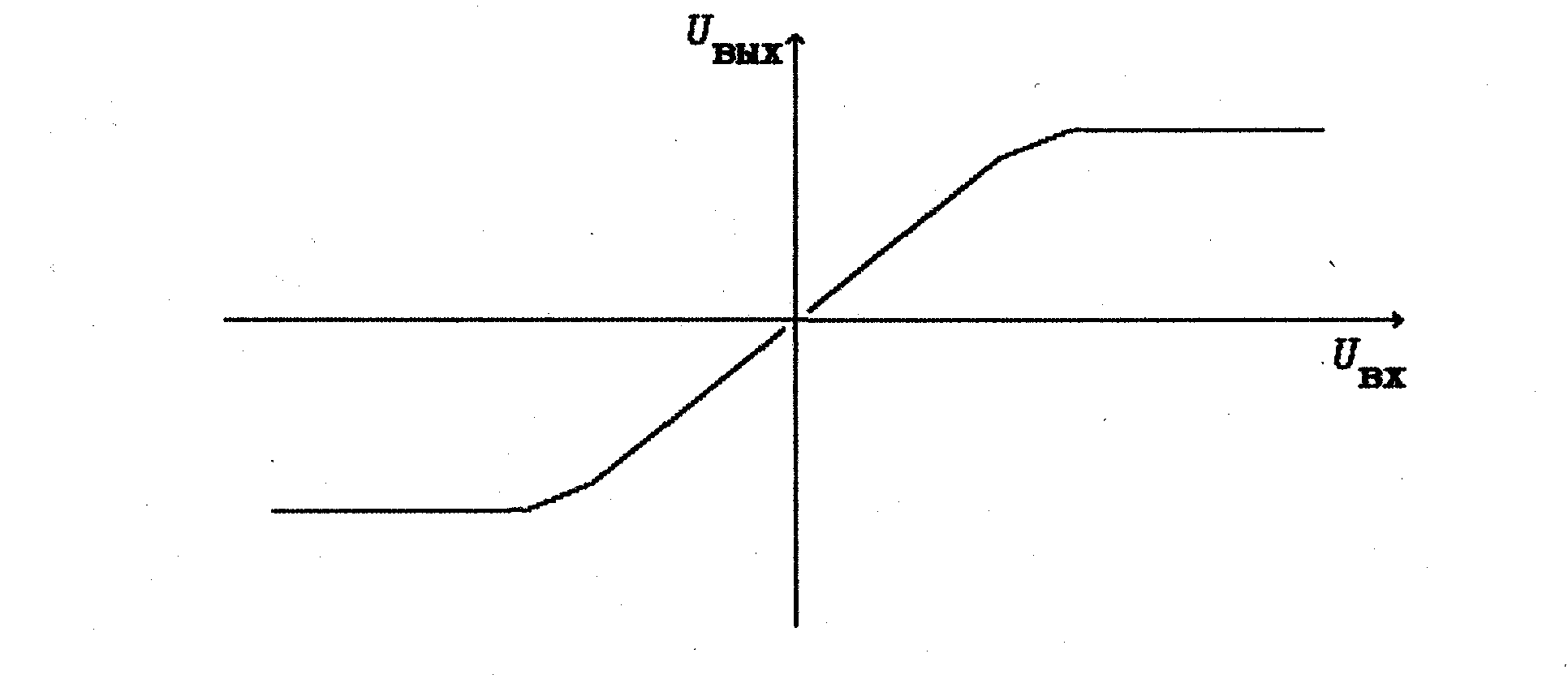
Рис.1. Статическая характеристика электронного усилителя
В реальных системах зона линейности усилителя незначительно превышает допустимую ошибку при работе системы. Это объясняется стремлением уменьшить мощность оконечного каскада, т.е. любой запас линейности ограничивается в итоге запасом мощности оконечного каскада.
Поэтому режим работы системы при выходе ее на насыщение является характерным при отработке относительно больших рассогласований, а такаю при создании высокоточных систем, имеющих узкую зону линейности.
Механизм возникновения нелинейных колебаний, связанных с насыщением, сводится к тому, что при больших рассогласованиях контур системы становится как бы разомкнутым и в системе возникают колебания. При атом в случае отсутствия больших рассогласований система устойчива, однако после резкого рассогласования она может, войти в режим автоколебаний, прекратить которые можно только выключением системы. Это типичный случай неустойчивости системы "в большом".
Учет нелинейности при рассмотрении CAP в режиме больших рассогласований позволяет обнаружить существенно новые явления, которые не могут наблюдаться в линейных системах. Так, если линейная система устойчива, то устойчивость сохраняется при любых внешних воздействиях, при любых начальных отклонениях от состояния равновесия. Нелинейная же система при малых отклонениях может быть устойчива, при больших - неустойчива. Свободные движения в устойчивой линейной системе автоматического регулирования имеют форму гармонических затухающих колебаний. Форма движений в нелинейных СAP негармоническая.
Нелинейности весьма разнообразны, но можно указать сравнительно небольшое число типичных нелинейных характеристик, которыми можно заменить наиболее часто встречающиеся нелинейности. Основные простейшие типовые нелинейности приведены в табл.1.
Явление насыщения встречается во всех реальных устройствах:
в лампах и транзисторах, работающих в усилителях, в детекторах, модуляторах, автогенераторах, дискриминаторах и других устройствах. Нелинейности такого типа связаны также с магнитными материалами трансформаторов» магнитных усилителей, сельсинов, электромашинных усилителей, двигателей и др.
Гистерезисные области встречаются в устройствах на ферромагнитных материалах и в газонаполненных приборах, любых триггерных устройствах, механических передачах о люфтом и т.д.
Таблица 1
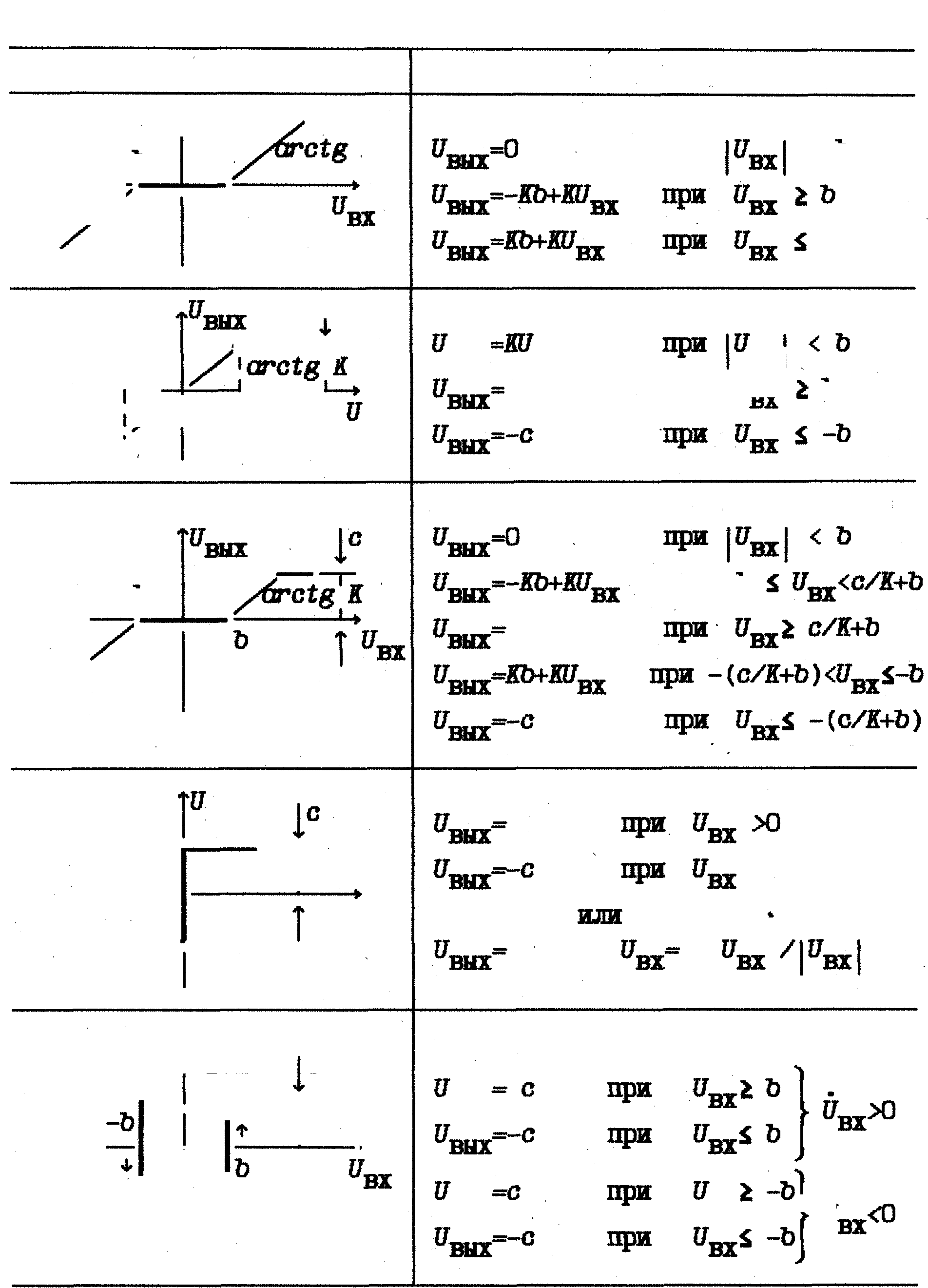
Окончание табл.1

Следует отметить, что реальные нелинейности аппроксимированы кусочно-линейными характеристиками. Это позволяет минимизировать число параметров, с помощью которых определяется та или иная типовая характеристика, создать условия для разработки типовых методов исследования CAP с той или иной нелинейностью, существенно облегчить их моделирование.