

4.4. Общие положения силового расчёта
П р и н ц и п Д а л а м б е р а. Силовой расчёт механизмов выполняется на основе принципа Даламбера, позволяющего рассматривать подвижные системы, к которым относятся механизмы как неподвижные, так и находящиеся в равновесии. Принцип Даламбера можно сформулировать так: если к системе сил, действующих на подвижную систему, добавить силы инерции, то такую систему можно рассматривать как находящуюся в равновесии, и к ней применимы законы статики.
П р и н ц и п о с в о б о ж д а е м о с т и. Если рассматривать механизм в целом, то имеющаяся в каждой кинематической паре, согласно принципу равенства действия и противодействия, пара сил (реакций), действующих по одной линии действия и равных по величине, уравновешивается и на равновесие механизма в целом не влияет. Так что даже в простом механизме определить эти реакции невозможно – они не войдут в уравнения равновесия. Для определения реакций необходимо механизм расчленить на части, каждая из которых была бы статически определима и в которой неизвестные реакции входили бы в число внешних сил и в уравнения равновесия. Принцип освобождаемости заключается, таким образом, в выделении части механизма путём разрушения некоторых кинематических пар и заменой в них связей реакциями, подлежащими определению.
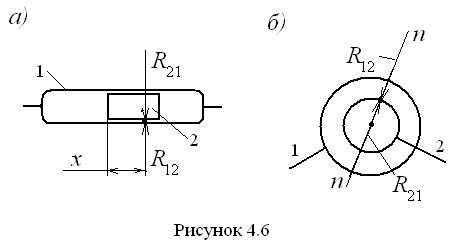
С т а т и ч е с к а я о п р е д е л и м о с т ь г р у п п А с с у р а. В кинематических парах пятого класса, будь то поступательная или вращательная пара, реакция характеризуется тремя параметрами: величиной, направлением и положением точки приложения. Причём в поступательной паре реакция направлена перпендикулярно направляющей, то есть известна по направлению (рис. 4.6, а). Два другие параметра неизвестны – это величина реакции и точка приложения (расстояние x от точки приложения до, например, левого торца звена 2). Во вращательной паре реакция проходит через центр шарнира (рис. 4.6, б), то есть известна её точка приложения. Два другие параметра – величина и направление также неизвестны. Таким образом, в любой кинематической паре пятого класса имеются два неизвестных параметра. Согласно положениям теоретической механики для твёрдого тела (в том числе и для звена механизма) можно в плоскости составить три уравнения равновесия. Для статической определимости системы звеньев необходимо равенство количества уравнений равновесия и количества неизвестных в них. Если в кинематической цепи имеется n звеньев, для каждого из которых можно составить три уравнения равновесия, то общее количество уравнений будет равно 3n. Если в этой кинематической цепи количество кинематических пар равно p5, а в каждой паре имеется два подлежащих определению параметра, то их общее количество равно 2p5. Для статической определимости системы звеньев необходимо равенство количества уравнений равновесия и количества неизвестных в них, то есть
![]() .
.
Это равенство совпадает с условием существования группы Ассура, следовательно, группа Ассура является статически определимой кинематической цепью, и силовой расчёт механизмов производится по группам Ассура.
П о с л е д о в а т е л ь н о с т ь с и л о в о г о р а с ч ё т а м е х а н и з м а. Силовой расчёт начинается с последней группы Ассура, в состав которой входит исполнительный орган машины, на который, как известно, действуют силы полезных (производственных или технологических) сопротивлений. При расчёте технологических машин эти силы входят в число исходных данных. В последнюю очередь рассчитывается входное (ведущее) звено.
М е т о д ы с и л о в о г о р а с ч ё т а. Здесь мы только перечислим эти методы. Итак, задачи силового расчёта решаются с применением следующих методов:
– метод планов сил;
– метод разложения сил;
– аналитический метод;
– метод «жёсткого рычага» Н. Е. Жуковского;
– экспериментальный метод.