

31.Структурные схемы с автоматической коррекцией погрешности
Идея:
Какие
погрешности мы знаем:

Задача: уменьшить или устранить (этим и будем заниматься) возникающие погрешности или, по крайней мере, учесть методами математический статистики (не рассматриваем).
Знаем:
ООС уменьшает мультипликативную
погрешность
 .
Необходимо узнать, как устранить
аддитивную погрешность
.
Необходимо узнать, как устранить
аддитивную погрешность
 и погрешность суммарную
и погрешность суммарную
 .
. -нормальный
коэффициент усиления
-нормальный
коэффициент усиления
Для этого существует метод на создании специальных структур, которые:
а) Автоматически вырабатывают сигнал
б) Корректирующий сигнал
вид которого зависит от вида погрешности, которую хотим уменьшить.

Пример 1:
П
ИП

х

+ Ш У М
(на выходе у стоит)
ИДЕАЛ:

РЕАЛЬНО:

Разница между реальным случаем и идеальным:

Необходимо собрать следующую цепь:
ИП

X

 Y
Y


К
выходу 
Причём между
Входной «иксовой» величиной и величиной,
подаваемой в коррекционном сигнале обязательно должна быть связь.
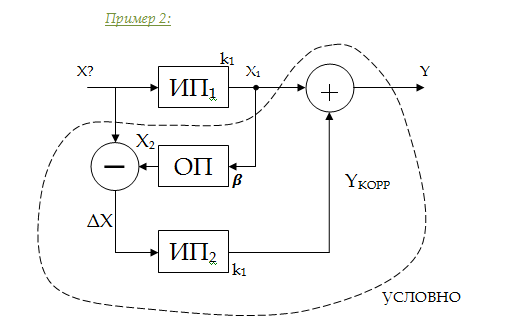
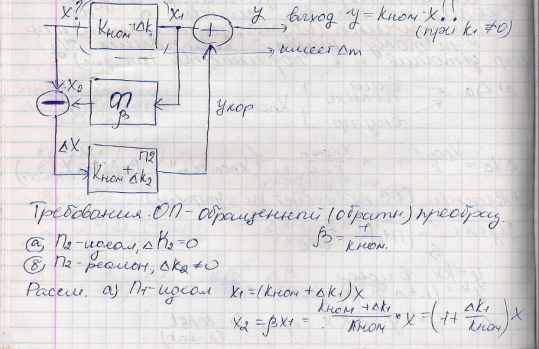
Где ОП – обращённый преобразователь

Случай
А)

Случай
Б)

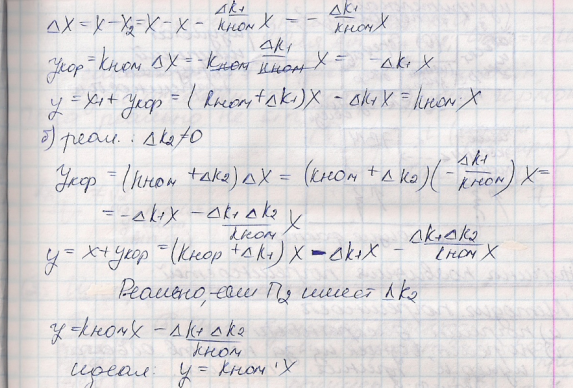
Необходимо доказать, что:
А )
даже если
)
даже если

Б)
(далее рисунок не перечерчиваем,ибо он наверху,смотрим только доказательство)
32. Автоматический мост постоянного тока

Условные обозначения:УН – усилитель напряжения; УМ – усилитель мощности (могут быть совмещены в одном приборе, как показано штриховкой); РД – реверсивный двигатель; R0i – образцовое сопротивление. Причём R01 – переменное сопротивление
Схема предназначена для измерения сопротивления RX c высокой точностью (см. «МОСТ» в нулевом методе).
Мосты с автоматизированным процессом уравновешивания называются автоматическими мостами; они находят широкое применение для измерения и регистрации величин. Автоматические мосты с дополнительным регулирующим устройством применяют для автоматического управления производственными процессами. В настоящее время широко распространены автоматические мосты для измерения, регистрации и регулирования температуры различных объектов. В качестве измерительного механизма в подобных мостах применяются терморезисторы.
Схема автоматического моста для измерения сопротивления RX приведена на рисунке выше. Мост питается от источника переменного напряжения питания UПИТ. Если мост уравновешен, то напряжение между точками а и б равно нулю и ротор двигателя РД неподвижен. При изменении измеряемого сопротивления RX на диагонали моста (между точками а и б) появится напряжение, значение которого зависит от RX. Это напряжение усиливается усилителями (простите за тавтологию) и подаётся на реверсивный двигатель РД, который, через редуктор (причина, почему реверсивный двигатель управляет движением резистора именно через редуктор очень проста: никто ведь не управляет марионеточными куклами, привязывая ниточки к маховику автомобильного двигателя, так и здесь: если всю энергию РД будет тратить на передвижение резистора, то последний может просто вылететь из схемы, настолько сильный он получит импульс), передвигает подвижный контакт переменного резистора R01 в сторону достижения равновесия моста и одновременно поворачивает указатель (ведь это же измерительный прибор), а при записи измеряемой величины – перемещает перо, записывающее на диаграмме её значение. Ротор двигателя вращается до достижения равновесия моста. Если автоматический мост предназначен для управления, то тем же двигателем приводятся в действие регулирующие устройства.
Автоматизация процесса уравновешивания в мостах переменного тока значительно сложнее. Автоматические мосты переменного тока для измерения и регистрации комплексного сопротивления должный иметь два регулирующих элемента (двигателя), которые обеспечивают два условия равновесия моста – по модулю и по фазе. По точности автоматические мосты переменного тока уступают мостам постоянного, всё из-за комплексности измерений и количестве элементов в собираемой схеме.
Точность этой схемы определяется порогочувствительностью реверсивного двигателя: чем она меньше, тем чётче будет работать система.
(если спросят)
Под
равновесием измерительного моста
понимается режим работы схемы, при
котором ток в измерительной диагонали
(диагональ а-б) отсутствует. Данное
условие выполняется при равенстве
произведений сопротивлений противоположных
плеч моста
 .
.