

4.8.2 Построение плана положения механизма 1 класса
Выделяем кривошип из механизма и вычерчиваем его в масштабе м/мм.
Прикладываем силы, действующие на звено 1 – кривошип. В точке А действует реакция со стороны отброшенного звена 2. В точке О прикладываем силу тяжести и реакцию , действующую со стороны стойки. Противоположно направлению углового ускорения прикладываем главный момент инерции и уравновешивающий момент My. ( — расстояние от точки О до линии действия реакции ).
4.8.3 Построение плана сил входного звена и определение реакции
Составим векторное уравнение равновесия механизма 1-ого класса:
Найдем длины векторов на плане сил через масштабный коэффициент силы:
[1–2] =
![]()
[2–3] =![]()
Построение плана сил осуществляем следующим образом:
Из точки 1 проводим отрезок [1–2] параллельно реакции противоположно по направлению. Из точки 2 проводим вектор [2–3] параллельно вектору . Тогда вектор [3–1] соответствует реакции .
Определяем значение искомой реакции через масштабный коэффициент силы:
[3–1]![]()
4.8.4 Определение уравновешивающего момента
Для определения величины и направления уравновешивающего момента My, составим уравнение суммы моментов, действующих на звено 1 относительно точки А:
![]()
![]()
4.9 Составление схемы алгоритма аналитического определения динамических реакций в группе Асура (2;3) и в механизме 1 класса
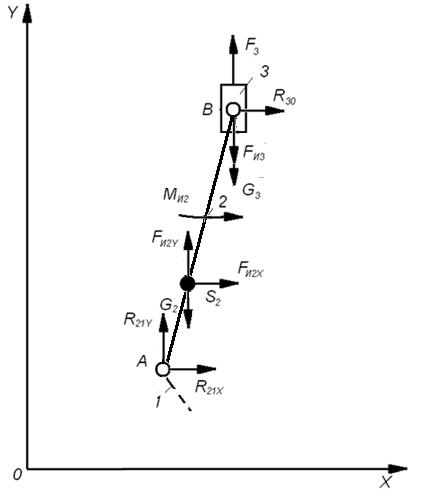
Рисунок 4.1 – Группа Ассура (2;3)
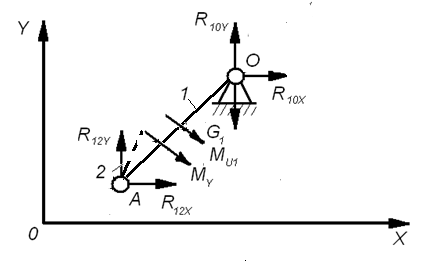
Рисунок 4.2 – Механизм первого класса
1.Определяем силы тяжести звеньев:
;
2.Главный момент сил инерции звена 1:
3. Проекции главного вектора сил инерции звена 2:
![]()
![]()
4. Главный вектор сил инерции звена 3:
5. Главный момент сил инерции звена 2:
6. Проекции реакций :
![]()

7. Реакция :
![]()
8. Проекции реакции R12:
![]()
![]()
9. Проекции реакции R23 во внутренней кинематической паре B:
![]()
![]()
10. Уравновешивающий момент :
![]() 11. Проекция реакции
:
11. Проекция реакции
:
![]()
![]()
12. Полная реакция :
![]() H;
H;
13. Полная реакция :
![]() =
=![]()
14. Полная реакция :
![]() =
=![]()
В таблице 4.2 сравним значения, полученные графическим и аналитическим способами.
Таблица 4.2 - Сравнение значений сил и моментов
Метод измерений |
, H |
, H |
, H |
, H |
, Hм |
Графический |
350 |
11800 |
10650 |
2200 |
809,3 |
Аналитический |
341,3 |
11895,5 |
10776,2 |
2181,3 |
799,4 |
Выводы по разделу
В результате проделанной работы в этом разделе определялись динамических реакций в кинематических парах и уравновешивающий момент сопротивления, действующего на кривошипный вал со стороны трансмиссии в двух положениях: № 3 (φ1 = 30°) и № 9 (φ1 = 210°). Результаты графического и аналитического методов решения поставленной задачи приведены в таблицах 4.1 и 4.2.
Динамический синтез кулачкового механизма
5.1 Постановка задачи динамического синтеза кулачкового механизма
Задачами проектирования кулачкового механизма являются:
1. Определения основных размеров из условия ограничения угла давления;
2. Построение профиля кулачка, обеспечивающего заданный закон движения толкателя.
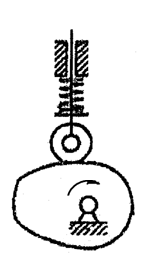
Рисунок 5.1 – Схема кулачкового механизма
5.2 Выбор исходных данных для проектирования механизма
Исходные данные, необходимые для проектирования кулачкового механизма заносим в таблицу 5.1.
Таблица 5.1 – Исходные данные
Ход толкателя h, м |
Фазовые углы поворота |
Допустимый угол давления,
|
Законы движения |
|||
|
|
|
При удалении |
При возвращении |
||
0,03 |
60 |
0 |
60 |
30 |
косинусоидальный |
с постоянным ускорением (параболический) |