

1.4. Гироскопический момент. Принцип д’Aламбера для гироскопа
Если на гироскоп действует момент, то гироскоп, как было установлено, прецессиру- ет. Вместе с тем, согласно третьему закону Ньютона, гироскоп при прецессии должен соз- давать момент противодействия - момент, который равен по величине и противоположен по направлению внешнему моменту, вынуждающему гироскоп прецессировать.
Рассмотрим подробнее физическую природу упомянутого момента противодействия.
Обозначим j&
скорость вращения
 колеса,
r
-
радиус
колеса, Jz
-
момент
инерции
колеса
относительно
оси
z.
Допустим
теперь,
что
колесо
помимо
собственного
вращения
совершает
вра-
щение
вокруг
неподвижной
оси
x1,
пер-
пендикулярной z, со скоростью
w
(чтобы
обеспечить
это
вращение,
колеса,
r
-
радиус
колеса, Jz
-
момент
инерции
колеса
относительно
оси
z.
Допустим
теперь,
что
колесо
помимо
собственного
вращения
совершает
вра-
щение
вокруг
неподвижной
оси
x1,
пер-
пендикулярной z, со скоростью
w
(чтобы
обеспечить
это
вращение,
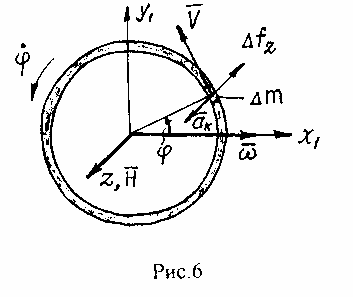
необходимо, естественно, приложить усилие к оси колеса). Рассмотрим в этих условиях движение малого элемента колеса массой m, показанного на рис.6. Кроме скорости V rj& , обусловленной вращением колеса вокруг z, этот элемент вращается вокруг x1 с
 угловой
скоростью
w
и
потому,
как
показывается
в
курсе
теоретической
механики,
он
угловой
скоростью
w
и
потому,
как
показывается
в
курсе
теоретической
механики,
он


 имеет
кориолисово
ускорение
ak
2w
имеет
кориолисово
ускорение
ak
2w
лельно оси z и равно по величине
V . Как нетрудно видеть, это ускорение парал-
ak 2rwj& sin
j p / 2 2rwj& co sj, (20)

 где определяет
положение
рассматриваемого
элемента
на
колесе,
а + /2
есть
вхо-
дящий
в
векторное
произведение
угол
между
векторами
w
и
v
.
Но
если
элемент
дви-
жется
с
ускорением,
то
он
действует
на
обод
с
силой
где определяет
положение
рассматриваемого
элемента
на
колесе,
а + /2
есть
вхо-
дящий
в
векторное
произведение
угол
между
векторами
w
и
v
.
Но
если
элемент
дви-
жется
с
ускорением,
то
он
действует
на
обод
с
силой
f z ak m ,
равной по величине и противоположной по направлению той силе, которая, действуя со
стороны колеса, заставляет этот элемент двигаться с ускорением .
С учетом (20)
fz 2rwj&
m cosj . (21)
Эта сила имеет наибольшую вели-

- в точках на оси y1 (рис.7); при этом на
правой стороне колеса она направлена
за рисунок, на левой - на нас, вследст- вие чего создается момент вокруг оси y1. Найдем этот момент. Плечо силы
fz относительно оси y1 равно
l r cosj
и создаваемый ею момент
M г f z l 2r 2wj&
m cos2 j.
Определяя теперь суммарный момент, что сводится к интегрированию элементарной
функции, получим
или
M г 2r2wj& 2p
2p
1m cos2 jdj
0
mr2 j&w
M г J zj&w
H w . (22)

 Таким
образом,
получен
результат,
который
на
первый
взгляд
кажется
парадоксаль-
ным:
вращение
раскрученного
обода
вокруг
оси
x1
приводит
к
возникновению
момента
с
его
стороны,
действующего
вокруг
оси
y1,
перпендикулярной
x1.
Однако
нетрудно
обна-
ружить,
что
этот
результат
находится
в
полном
соответствии
с
предыдущими.
Действи-
тельно,
колесо,
воздействуя
на
опору
(ось)
с
моментом
Мг,
вызывает
реакцию
в
виде
мо-
мента
М'г,
равного
по
величине
Мг
и
противоположно
ему
направленного.
Именно
под
действием
этого
момента
в
соответствии
со
вторым
свойством
гироскоп
(колесо)
и
пре-
цессирует
вокруг
x1
с
угловой
скоростью
w
.
Из
изложенного,
в
частности,
следует,
что
для
того,
чтобы
раскрученный
обод
заставить
вращаться
вокруг
оси
x1,
необходимо
ли-
шить
его
возможности
вращаться
вокруг
оси
y1
(в
противном
случае
колесо
просто
раз-
вернется
вокруг
этой
оси,
совместив
ось
собственного
вращения
с
направлением
w
,
т.е.
с
осью
x1).
Таким
образом,
получен
результат,
который
на
первый
взгляд
кажется
парадоксаль-
ным:
вращение
раскрученного
обода
вокруг
оси
x1
приводит
к
возникновению
момента
с
его
стороны,
действующего
вокруг
оси
y1,
перпендикулярной
x1.
Однако
нетрудно
обна-
ружить,
что
этот
результат
находится
в
полном
соответствии
с
предыдущими.
Действи-
тельно,
колесо,
воздействуя
на
опору
(ось)
с
моментом
Мг,
вызывает
реакцию
в
виде
мо-
мента
М'г,
равного
по
величине
Мг
и
противоположно
ему
направленного.
Именно
под
действием
этого
момента
в
соответствии
со
вторым
свойством
гироскоп
(колесо)
и
пре-
цессирует
вокруг
x1
с
угловой
скоростью
w
.
Из
изложенного,
в
частности,
следует,
что
для
того,
чтобы
раскрученный
обод
заставить
вращаться
вокруг
оси
x1,
необходимо
ли-
шить
его
возможности
вращаться
вокруг
оси
y1
(в
противном
случае
колесо
просто
раз-
вернется
вокруг
этой
оси,
совместив
ось
собственного
вращения
с
направлением
w
,
т.е.
с
осью
x1).
Момент Мг, определяемый в рассмотренном частном случае формулой (22), называется гироскопическим моментом. Он, как следует из изложенного, является инерционным моментом, обусловленным кориолисовым ускорением.

 Для
нахождения
гироскопического
момента
в
общем
случае
поступим
следующим
об-
разом.
Пусть
M -
внешний
момент,
под
действием
которого
гироскоп
прецессирует
с
угловой
скоростью
w
.
Для
нахождения
гироскопического
момента
в
общем
случае
поступим
следующим
об-
разом.
Пусть
M -
внешний
момент,
под
действием
которого
гироскоп
прецессирует
с
угловой
скоростью
w
.
Из основного равенства (3)

 G M
,
G M
,
с учетом того, что вытекает
G Hz o ,
H z&o M
. (23)
Но, как известно из курса теоретической механики, производная орта zo, вращающе-
 гося
с
угловой
скоростью
w
,
равна
гося
с
угловой
скоростью
w
,
равна
 z&o w
z&o w
z o .
или
Тогда (23) принимает вид
 H
w
H
w
 z
o
M
z
o
M


 w
H
M
.
w
H
M
.
Наконец, поскольку M г
щую формулу
M , для гироскопического момента получаем следую-


 M
г
H w
.
M
г
H w
.

 Эта
формула
в
частном
случае,
когда
H
перпендикулярен
w
,
совпадает
с
ранее
полу-
Эта
формула
в
частном
случае,
когда
H
перпендикулярен
w
,
совпадает
с
ранее
полу-
ченной формулой (22).
 Изложенное
позволяет
сформулировать третье основное
свойство
гироскопа:
при
вращении
оси
гироскопа
с
угловой
скоростью
w
возникает
приложенный
к
опорам
ги-
роскопа
гироскопический
момент,
равный
Изложенное
позволяет
сформулировать третье основное
свойство
гироскопа:
при
вращении
оси
гироскопа
с
угловой
скоростью
w
возникает
приложенный
к
опорам
ги-
роскопа
гироскопический
момент,
равный


 M
г H
M
г H
w , (24)
где Н - вектор кинетического момента гироскопа.
 Как
следует
из
формулы
для
M
г
,
этот
момент
стремится
совместить
по
кратчайшему
пути
вектор
кинетического
момента
гироскопа
с направлением
скорости
вращения
оси
гироскопа
(правило
Фуко).
Как
следует
из
формулы
для
M
г
,
этот
момент
стремится
совместить
по
кратчайшему
пути
вектор
кинетического
момента
гироскопа
с направлением
скорости
вращения
оси
гироскопа
(правило
Фуко).
Следует отметить, что величины гироскопических моментов могут быть весьма вели- ки. Это обусловливает необходимость их учета при расчете и подборе опор для быстро вращающихся роторов (двигатели, турбины и т.п.), размещаемых на подвижных объектах. Гироскопические моменты могут создаваться и специально для осуществления управле- ния объектами, о чем будет сказано ниже.
В заключение данного раздела, используя понятие гироскопического момента, рас- смотрим принцип Д’Aламбера применительно к гироскопу. Как известно, принцип Д’Aламбера является эффективным методом решения задач динамики механических сис- тем, давая возможность составлять уравнения движения систем в форме уравнений равно- весия, т.е. используя принципы статики. Достигается это введением фиктивных (т.е. ре-

 ально
не
существующих)
сил
инерции.
Согласно
принципу
Д’Aламбера
сумма
всех
сил
(моментов),
приложенных
к
системе,
и
сил
инерции
(инерционных
моментов)
равна
нулю.
Так,
если
тело
с
массой
m
движется
с
ускорением a
,
испытывая
действие
силы
F
,
то
уравнение
его
движения
можно
записать
в
виде
ально
не
существующих)
сил
инерции.
Согласно
принципу
Д’Aламбера
сумма
всех
сил
(моментов),
приложенных
к
системе,
и
сил
инерции
(инерционных
моментов)
равна
нулю.
Так,
если
тело
с
массой
m
движется
с
ускорением a
,
испытывая
действие
силы
F
,
то
уравнение
его
движения
можно
записать
в
виде
 F Fи 0,
F Fи 0,
 где
Fи
где
Fи
ma - сила инерции. Если тело с моментом инерции J относительно оси вра-

 щается
вокруг
нее
с
ускорением
e
,
испытывая
действие
момента M относительно
оси,
то
уравнение
его
движения
можно
записать
в
виде
щается
вокруг
нее
с
ускорением
e
,
испытывая
действие
момента M относительно
оси,
то
уравнение
его
движения
можно
записать
в
виде


 M M
и 0, (25)
M M
и 0, (25)
 где
M
и
где
M
и
Je - инерционный момент.
Для записи принципа Д’Aламбера применительно к гироскопу используем основное
равенство (3)

 G& M
,
G& M
,
представив кинетический момент G в виде суммы его основной составляющей
 H
Hz
o
и
составляющей
H
Hz
o
и
составляющей
G G H .
Из (3) следует
M H&
G& 0.
(26)
Но, как было показано выше,
H& H z&o M г,
поэтому (26) можно представить в виде
M M г
М ин 0 , (27)
аналогичном (25) и отличающимся от этого равенства лишь тем, что инерционный мо-
мент представлен в виде суммы его преобладающей составляющей, отражающей специ- фику гироскопа - гироскопического момента M г - и "обычной" для вращающегося тела составляющей М ин , обусловленной угловым ускорением, вид которой легко усматрива-
ется из уравнений (8) движения гироскопа (первые слагаемые в левых частях уравнений,
но взятые с противоположным знаком). Если в (27) последней составляющей пренебречь,
то получится уравнение
M M г 0, (28) записав которое в проекциях на оси x1 и y1 резалевой системы координат, мы получим уже рассматривавшиеся выше укороченные, или прецессионные уравнения движения гироскопа. Уравнение (28), как правило, и используется при выводе уравнений дви- жения гироскопических устройств в инженерной практике.