

1.3. Основные свойства движения гироскопа
 Рассмотрим
сначала
случай,
когда
на
гироскоп
не
действуют
никакие
моменты,
т.е.
в
(3)
M 0
(случай
Эйлера-Пуансо).
Такой
гироскоп
называют
свободным.
Чтобы
ги-
роскоп
был
свободным,
в
частности,
должно
выполняться
условие
совпадения
его
центра
масс
с
центром
О
вращения,
т.е.
гироскоп
должен
быть
астатическим.
Для
свободного
Рассмотрим
сначала
случай,
когда
на
гироскоп
не
действуют
никакие
моменты,
т.е.
в
(3)
M 0
(случай
Эйлера-Пуансо).
Такой
гироскоп
называют
свободным.
Чтобы
ги-
роскоп
был
свободным,
в
частности,
должно
выполняться
условие
совпадения
его
центра
масс
с
центром
О
вращения,
т.е.
гироскоп
должен
быть
астатическим.
Для
свободного
гироскопа согласно (3)
 G& 0,
G& 0,
т.е G сохраняет свою величину и направление в инерциальном пространстве. Но посколь-
ку, согласно предыдущему п.1.2, с достаточно высокой точностью

 G
H
,
где
H
Hz
o,
G
H
,
где
H
Hz
o,
то отсюда вытекает первое основное свойство гироскопа: ось свободного гироскопа со-
храняет свою ориентацию в инерциальном пространстве.
Строго говоря, это свойство реализуется в некотором приближении, но тем точнее,
чем больше кинетический момент гироскопа.
Для практики важен ответ на вопрос: как изменится ориентация свободного гироско- па, если на него подействует какое-то кратковременное возмущение? Иными словами, ус- тойчиво ли свободный гироскоп сохраняет свою ориентацию? Для ответа на этот вопрос обратимся к уравнениям (8), полагая, что ориентация инерциальной и резалевой систем координат выбрана так, что положению гироскопа до воздействия на него возмущения соответствовали углы (t)= 0, (t) = 0. Запишем уравнения (8) в отклонениях от упо- мянутого невозмущенного движения в линейном приближении, сохранив, для упрощения записи, за отклонениями углов обозначения и :
J эb&&
J эa&&
H a& 0,
H b& 0.
(12)
Результатом кратковременного воздействия на гироскоп возмущения является появ-
&
- обозначим их aо, bо, a&o , b&
- кото-
o
Решение системы (12) может быть легко получено; при указанных выше начальных усло-
виях оно имеет вид:
&
n 1bo
n 1a&o sin nt
n 1bo cos nt,
(13)
b bo
n 1a&o
n 1a&o cos n
1bo sin nt,
где
n J э 1Н
&
Нетрудно видеть, что соотношениям (13) соответствует такое движение гироскопа,
при котором его ось описывает конус, направление оси которого задается углами
а полураствор равен
&
n 1bo, b bo
n 1a&o ,
n 1 a& 2
b&2 1/2
o o .
Приведенные выкладки свидетельствуют о том, что в результате воздействия на гиро-
скоп кратковременного возмущения он изменит свою ориентацию, но величина этого из-
менения ограничена и тем меньше, чем меньше возмущение и больше Н. Иными словами, свободный гироскоп сохраняет свою ориентацию устойчиво, хотя и не асимптотически (т.е. его отклонения, вызванные воздействием возмущения, со временем не увеличивают- ся, но и не исчезают).
Пусть теперь гироскоп не является свободным и на него действует момент M . Тогда согласно (3)
G& M .
&
Поскольку G
есть скорость конца вектора кинетического момента, то равенство (3)
применительно к гироскопу можно трактовать следующим образом: скорость конца век- тора кинетического момента гироскопа равна моменту, приложенному к гироскопу (теорема Резаля).
Итак, приложение к гироскопу момента вызывает изменение его ориентации, т.е. к
вращению оси гироскопа. Это вращение под действием момента называют прецессией

 гироскопа.
Найдем
скорость
прецессии,
обозначив
ее
гироскопа.
Найдем
скорость
прецессии,
обозначив
ее
w п . Очевидно, что вектор w п
ор-
тогонален оси гироскопа (поскольку угловая скорость, имеющая направление оси, к изме-
нению ориентации этой оси не приводит).
 Далее,
w
п
Далее,
w
п
ортогонален
z&o, а модули этих двух векторов равны (это следует из само-
го определения понятия угловой скорости). Из сказанного вытекает следующее выраже-
 ние
для
w
п
ние
для
w
п
п
. (15)
Далее, поскольку с достаточной точностью
G Hz o , (16)
то из (3) с учетом постоянства H получаем
z&o H 1M
и после подстановки в (15)
wп H
1 z o
M . (17)
Из изложенного вытекает второе основное свойство гироскопа: при действии на ги-
роскоп момента он прецессирует с угловой скоростью, определяемой равенством (17).
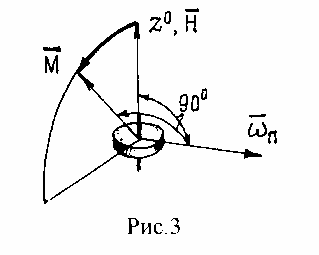
Нетрудно видеть, что прецессия происходит в плоскости, параллельной вектору мо- мента и оси гироскопа, при этом гироскоп стремится совместить свою ось с направлением момента по кратчайшему пути ,как показано на рис.3.Изложенное еще раз поясняет отме- ченную в п.1.2 особенность поведения гироскопа. Следует отметить, как и ранее, что опи- санное свойство реализуется с тем большей точностью, чем больше Н. Строго же оно не реализуется по той причине, что использованное при его выводе равенство (16) - приближенное, хотя и достаточно точное, - в нем не учтены инерционные члены, содер- жащие Jэ. Но при тех же условиях получены и уравнения (10), (11), которые, следователь- но, отражают прецессионное движение, почему и называются прецессионными. Как уже отмечалось, при решении большинства прикладных задач оказывается вполне допусти- мым ограничиться рамками прецессионной теории.
Возникает естественный вопрос: как изме- нятся сформулированные выше утверждения, если не пренебрегать инерционными членами? Иными словами, насколько корректно ограничи- ваться рамками прецессионной теории? Для от-
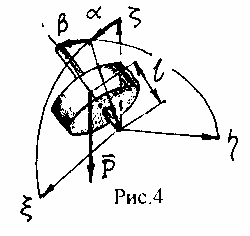
вета на этот вопрос рассмотрим представляющий самостоятельный интерес случай дви- жения гироскопа, проанализированный Лагранжем и Пуассоном. Выводы, которые бу- дут сделаны по результатам этого рассмотрения, распространимы и на общий случай. В случае Лагранжа-Пуассона момент, прикладываемый к гироскопу, создается силой тяже-
сти P , т.к. полагается, что центр масс гироскопа смещен относительно центра вращения в направлении оси гироскопа на величину l (рис.4). Для упрощения рассмотрения будем полагать, что углы и малы, и в этом предположении запишем уравнения движения гироскопа (8), удерживая только члены первого порядка малости:
J эa&&
Ha&
Hb&
Plb ,
Pla .
Решение этой линейной системы уравнений может быть получено достаточно просто и представимо в виде
где
a aп
b bп
aн ,
b н ,
(18)
&
n 1bo
coswпt
bo n
1a&o sin wпt,
bп bo
n 1a&o coswпt
&
1bo sin wпt,
(19)
&
bo cosnt
wп bo
a&o
sinnt ,
b н n
&
1 a&o cosnt
wпao b&o
sinnt .
Здесь ao, bo,a&o, bo - начальные условия,
=H/Jэ, п = Р l /H.
Из (18) и (19) следует, что движение гироскопа представляет собой сумму двух гармо- нических движений, одно из которых совершается с малой круговой частотой п (ее ве- личина обратно пропорциональна большой величине Н), а другое - с высокой частотой n (величина которой прямо пропорциональна Н). Результирующее движение иллюстриру- ется рис.5.
Если пренебречь инерционными членами, устремив Jэ к нулю, то при этом исчезнут
н и н и останутся составляющие п и п. Следовательно, п и п описывают прецесси-
онное движение гироскопа.

чезнет, но останется высокочастотное
движение.
Таким образом, это движение являет- ся собственным движением гироскопа. Оно называется нутационным движени- ем (или просто нутацией). Амплитуда ну- тации, как видно из (19), весьма мала, т.к. она обратно пропорциональна Н.
Таким образом, в разобранном случае
движение гироскопа складывается из низ- кочастотного прецессионного (вынуж- денного) движения и высокочастотного движения. При этом пренебрежение
инерционными членами, т.е. рассмотрение движения гироскопа в рамках прецессионной теории, эквивалентно пренебрежению нутационным движением, что в большинстве слу- чаев вполне допустимо вследствие его малости.