

Лекция №19.
Пусть задача квадратичного программирования имеет постановку:
 F(x)=CX+XTDX
max
F(x)=CX+XTDX
max
(1) AX<=B
X>=0
Предположим, что функция строго вогнутая, т.о. будем иметь задачу вогнутого нелинейного программирования.
Применяя теорему Куна-Таккера к задаче (1), можно получить необходимое условия задачи.
Составим функцию Лагранжа для задачи (1):
F(X, Л)=CX+XTDX+Л(B-AX)
dF =C+2DX-ATЛ<=0
dx
dF =b-AX>=0
dЛ
Введем два дополнительных вектора:
V>=0 и W>=0 (2)
С+2DX-AT Л=0 (3)
B-AX-W=0 (4)
Теорема об оптимальности решения:
x10
Вектор X0= x20 <=0 является оптимальным решением
…
xn0
задачи (0)тогда и только тогда, когда существуют такие неотрицательные вектора:
Л=(л1,л2,…лm)>=0
V=(v1,…vn)>=0
W=(w1,…wm)>=0, которые удовлетворяют условиям (3), (4) и условиям дополняющей нежесткости
XTV=0 (5)
ЛTW=0 (6)
Т.о решение задачи квадратичного программирования (1) свелось к нахождению решения системы (n+m) линейных уравнений (3),(4),(5),(6) с (2(n+m)) неизвестными. Решение системы (3-6), если оно существует, то оно должно быть одним из допустимых базисный решений системы (3-4).
Для нахождения ДБР может быть использован обычный симплексный метод.
Алгоритм:
1. Для исходной задачи составляется функция Лагранжа.
2. Записывается условие Куна-Таккера.
3. Вводятся дополнительные вектора (V,W) и записывается система уравнений.
4. Записывается
система уравнений в стандартной
![]() форме.
Заполняется симплексная таблица , в
которой отсутствует строка для целевой
функции.
форме.
Заполняется симплексная таблица , в
которой отсутствует строка для целевой
функции.
5. Применяя табличный алгоритм замены переменных, находят базисное решение. Найденное решение проверяется. Если удовлетворяет, то и оптимальным решением. Если неудовлетворяет ищется новое базисное решение и т.д.пока не будет найдено оптимальное решение либо установлено, что несуществует оптимального решения.
Замечание;
Решение допустимого базисного решения
должно удовлетворять решениям
нежесткости. И при замене переменных
необходимо менять переменные;![]()
![]()
![]()
![]() V
;
V
;
Л
![]() W
;
W
;
ГЕОМЕТРИЧЕСКОЕ ПРОГРАММИРОВАНИЕ
ГП - это еще один класс задач нелинейного программирования. В ГП как оптимальная функция так и ограничения относятся к позиномиальным функциям.
Позиномом называется функция m переменных вида;
![]() (
(![]()
![]() …
…![]() )=
)=![]() .
.
![]() .
.![]() ……
……![]() (1)
(1)
где
![]()
![]() 0
,
0
,![]()
![]() 0
j=1,n
0
j=1,n
![]() -вещественные
числа
-вещественные
числа
Задача ГП в общем случае формулируется следующим образом;
![]() (
(![]()
![]() …
…![]() )=
)=![]()
![]()
![]()
![]()
![]()
![]() min
(2)
min
(2)
![]() (
(![]()
![]() ….
….![]() )=
)=![]()
![]()
![]() ….
….![]()
![]()
![]() 1
(2)
1
(2)
k=1,n-кол-во ограничений
![]() 0
0
найти min :
![]() -множество
-множество
![]()
![]() =
=![]()
![]() =
=![]()
![]() -входящие
как в функцию так и в ограничения образуют
матрицу экспонент.
-входящие
как в функцию так и в ограничения образуют
матрицу экспонент.
A=![]()
![]()
Кол-во
столбцов =кол-ву переменных
![]()
Кол-во строк =кол-ву позиномов, входящих в функцию и в ограничения.
Каждой строке матрицы соответствует один позином.
Функция (1) называется прямой функцией, а ограничения (2)
Называются вынужденными ограничениями.
Лекция 20. Задача геометрического программирования с ограничениями.
Прямая функция :
 (1)
(1)
![]()
где
![]()
![]()
![]()
![]()
![]()
Двойственная задача :
![]() (2)
(2)
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() (3)
(3)
![]() , где
, где
![]() -
двойственные переменные ;
-
двойственные переменные ;
число двойственных
переменных равно n
, а n
– это общее число позиномов задачи (1)
:
![]()
между задачами (1) и (2) имеется соответствие , которое сформулируем в виде теоремы :
Теорема :
-
Если задача (2) имеет оптимальное решение
 то и задача (1) имеет его
то и задача (1) имеет его
 .
. -
Максимальное значение целевой функции задачи (2) равно минимальному значению целевой функции задачи (1)
-
Оптимальное решение задач (1) и (2) связаны соотношениями :

![]()
Сформулированная теорема позволяет найти оптимальное решение задачи (1) по найденному задачи (2) .
Степень трудности
задачи (1)
![]()
При d=0
, решение сводится к решению системы
ограничений :
 ,
,
 ,
,
![]() ,
,
![]()
При d>0 , используются другие методы ( например симплексный )
Алгоритм при d=0
-
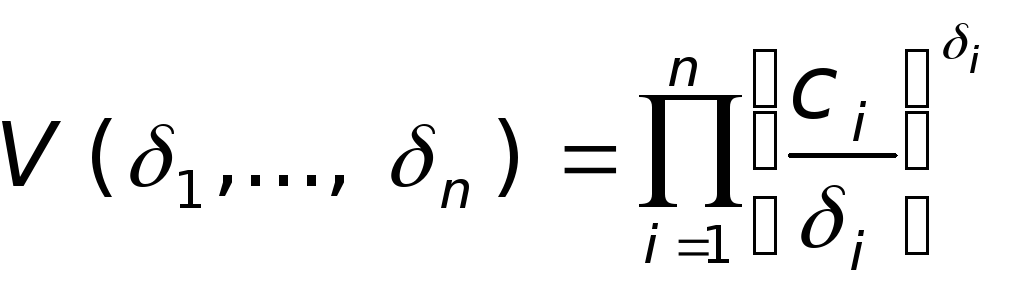
По исходной задаче составляется двойственная функция , если без ограничений , то
-
Cоставляется система уравнений для весовых коэффициентов
 ,
,
 ,
,
 ,
где
,
где
 для задачи без ограничений и
для задачи без ограничений и
-
Решается система и ищутся

-
Вычисляется значение двойственной функции , при найденном
-
Составляется система уравнений для задачи
- без ограничений
![]()
- с ограничениями
![]()
-
Решая полученную систему находят оптимальное решение исходной задачи , при этом
минимальное
значение функции будет равно
![]()
ЧИСЛЕННЫЕ МЕТОДЫ ОПТИМИЗАЦИИ .
Методы этого типа используются для решения задач нелинейного программировании. Они основаны на построении конечной последовательности арифметических действий функций и ограничений задач нелинейного программирования .
Эти методы позволяют найти решение задачи с любой заданной точностью .
Пусть задача нелинейного программирования имеет постановку :
Различают методы :
-
если ограничений нет , то задача безусловной оптимизации и соответствующие методы
-
если с ограничениями , то задача условной оптимизации и соответственно методы
-
одномерной оптимизации , если
-
многомерной оптимизации , если
Методы одномерной безусловной оптимизации .
Предположим , что
функция
![]() -
унимодальная .
-
унимодальная .
Определение :
Функция
![]() называется унимодальной на
называется унимодальной на
![]() , если существует единственная точка
минимума (максимума)
, если существует единственная точка
минимума (максимума)
![]() , а отрезок
, а отрезок
![]() называется интервалом неопределенности
.
называется интервалом неопределенности
.
Идея поискового метода :
В некоторой точке
отрезка
![]() вычисляется
вычисляется
![]() ,
по результатам сравнения определяется
точка , в которой значение функции
наименьшее . Отображается т.ж. часть
интервала с большим значением .
,
по результатам сравнения определяется
точка , в которой значение функции
наименьшее . Отображается т.ж. часть
интервала с большим значением .
На новом интервале операция повторяется и т.д.
Перед началом
поиска необходимо задать конечную длину
L
, которая должна быть не более
![]() ( точность ) .
( точность ) .
Метод равномерного поиска :
-
Задается начальный отрезок
 , L
,
, L
,
-
Затем отрезок
 делится n
равных частей , вычисляются значения
делится n
равных частей , вычисляются значения
 ,
,

-
Значения сравниваются и находится точка
 с наименьшим значением функции
с наименьшим значением функции -
Далее интервал
 делится на n
частей и т.д. пока L>
делится на n
частей и т.д. пока L>
Метод деления на два :

![]()







![]()
![]()
![]()
![]()
![]()
Сравниваем
![]() ,
,
![]() ,
,
![]() . Интервал неопределенности точками
. Интервал неопределенности точками
![]() ,
,![]() и
и
![]() делится на четыре равных отрезка .
Вычисляются значения функции в этих
точках . Сравниваются полученные значения
. В силу унимодальности функции возможны
три случая :
делится на четыре равных отрезка .
Вычисляются значения функции в этих
точках . Сравниваются полученные значения
. В силу унимодальности функции возможны
три случая :
1.
![]() следовательно
выбираем отрезок
следовательно
выбираем отрезок
![]()
2.
![]() следовательно
выбираем отрезок
следовательно
выбираем отрезок
![]()
3






















 .
.
![]() следовательно
выбираем отрезок
следовательно
выбираем отрезок
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Т.о. интервал
неопределенности сократился в двое во
всех трех случаях . Далее , на следующей
итерации , отрезок снова делится четыре
части , но значения функции вычисляются
только в двух точках , поскольку значения
в трех точках уже были вычислены на
предыдущей итерации . Процесс продолжается
до тех пор , пока интервал не станет
меньше L
, т.е.
![]() ,
,
![]() ;
;
Лекция 21. Численные методы условной оптимизации.
Пусть задача нелинейного программирования имеет постановку:
Методы условной оптимизации можно разделить на две группы: прямые и непрямые.
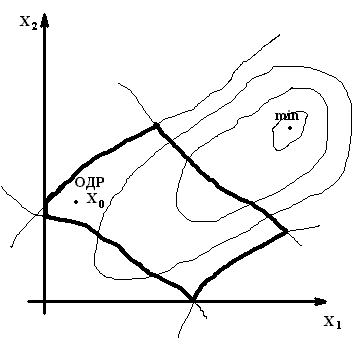
В прямых методах при решении задачи минимизации оперируют непосредственно с исходной задачей. Пример таких методов: метод проекции градиента, метод случайного поиска.
Суть этих методов
состоит в том, что строится последовательность
точек
![]() значение функции, на которых убывает
значение функции, на которых убывает
![]() и при этом выполняются ограничения
задачи.
и при этом выполняются ограничения
задачи.
Непрямые методы сводят исходную задачу условной оптимизации к последовательности задач безусловной оптимизации к некоторой вспомогательной функции. В этих методах ограничения задачи учитываются в неявном виде (косвенно). Пример таких методов: метод штрафных функций.
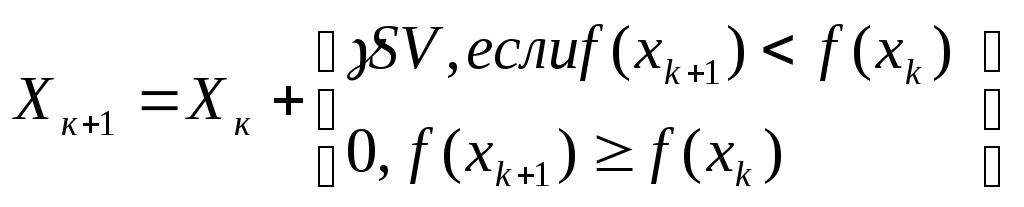
Прямые методы. Метод случайного поиска.
В его основе лежит внесение элементов случайности в процедуру формирования точек
![]()
Задаётся начальная точка:
![]()
![]()
![]() должна
должна
![]() ОДР
удовлетворяет всем ограничениями. Затем
итерационная процедура построения этих
точек.
ОДР
удовлетворяет всем ограничениями. Затем
итерационная процедура построения этих
точек.
![]() ,шаг
поиска это число задаётся
,шаг
поиска это число задаётся
 элементы
этой матрицы определяются:
элементы
этой матрицы определяются:![]() ,
М – положит большое число.
,
М – положит большое число.
![]() случайный вектор
с равномерным распределением на отрезке
[-1,1].
случайный вектор
с равномерным распределением на отрезке
[-1,1].
Равномерный закон распределения.
Возьмем отрезок [-1,1] и разобьём его на 10 частей. И датчиком случайных чисел сгенерировано 100 чисел.
О ни
будут распределены по равномерному
закону . Если для всех К интервал попадет
около 10 чисел (может быть 9 или 11).
ни
будут распределены по равномерному
закону . Если для всех К интервал попадет
около 10 чисел (может быть 9 или 11).
Нормальный закон (1).Кривая Гауса.
В результате получаем новую точку Х1. Для новой точки (?) случайным образом получаем новую точку.
Если процессе
построения точек некоторая точка выйдет
за границы области , то значение компоненты
в этой точке полагается равным граничным
значениям . Если на какой то итерации
делается подряд
![]() неудачных попыток (
неудачных попыток (![]() должно быть задано ), то после этого шаг
поиска
должно быть задано ), то после этого шаг
поиска
![]() уменьшается в какое то количество раз
и т.д.
уменьшается в какое то количество раз
и т.д.
Процедуру оптимизации
прекращают, если выполняется условие
![]() ,
,
![]() - определяет точность результата.
- определяет точность результата.
Метод проекции градиента.
![]() ,
,
![]()
![]()

![]()
Задаем начальную
точку
![]() .
Потом строиться последовательность
точек.
.
Потом строиться последовательность
точек.
![]() - шаг спуска,
- шаг спуска,
![]() - grad
функции в точке Хk.Таким
образом, если точка
- grad
функции в точке Хk.Таким
образом, если точка
![]() является внутренней точкой, то это
обычный градиентный метод.
является внутренней точкой, то это
обычный градиентный метод.
Когда точка
![]() вышла
за пределы области, необходимо
спроектировать градиент на границу
области, а дальше следующая точка ищется
в направлении проекции градиента.
вышла
за пределы области, необходимо
спроектировать градиент на границу
области, а дальше следующая точка ищется
в направлении проекции градиента.
Определяем новую точку и т.д. Процедура заканчивается, когда
![]()
![]() .
.
Сложность метода: построение проекции, если граница нелинейная.
Непрямые методы. Методы штрафных функций.
![]()
![]()
![]()
Строим вспомогательную функцию
![]()
![]() - положительное
число – коэффициент штрафа. Штраф за
нарушение границы.
- положительное
число – коэффициент штрафа. Штраф за
нарушение границы.
R – штрафная функция – она подбирается таким образом, что её значение равно нулю внутри области ОДР и резко возрастает за пределами области ОДР.