

1 Кинематический и силовой расчеты привода Выбор электродвигателя и редуктора
1.1 Разработка кинематической схемы привода
В соответствии с комплексным техническим заданием, составляю кинематическую схему привода (рисунок 1), используя кинематические обозначения – ГОСТ 2.105-95:
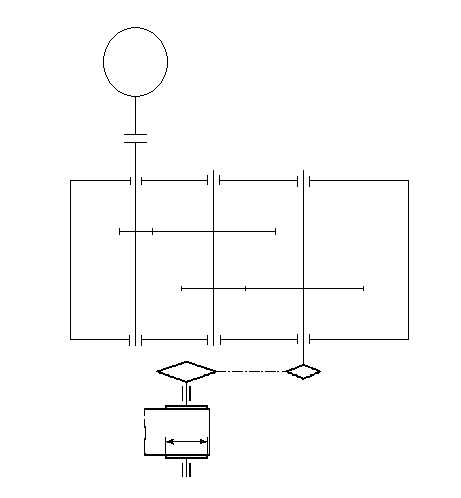
1 – Электродвигатель; 2 – Муфта – упругая компенсирующая; 3 – Цилиндрический двухступенчатый редуктор; 4 – Открытая цепная передача; 5 – Исполнительный механизм – барабан приводной;
Рисунок 1 – Кинематическая схема привода ленточного конвейера
1.2 Определение мощности на валу приводного барабана
Мощность на валу исполнительного механизма вычисляется по формуле:

где Ft – окружное усилие на исполнительном механизме, Н;
Vt – окружная скорость исполнительного механизма, м/с;
 Вт.
Вт.
1.3 Определение расчётной мощности на валу двигателя
Расчётная
мощность на валу двигателя определяется
по мощности на валу исполнительного
механизма с учётом потерь в приводе:

где
 – общий КПД привода.
– общий КПД привода.

 =0,98
– КПД
компенсирующей муфты;
=0,98
– КПД
компенсирующей муфты;
 =0,97
– КПД цилиндрического передачи;
=0,97
– КПД цилиндрического передачи;
 =0,93
– КПД открытой цепной передачи.
=0,93
– КПД открытой цепной передачи.

Тогда
 Вт.
Вт.
1.4 Определение частоты вращения вала исполнительного механизма
Частота вращения вала исполнительного механизма вычисляется по формуле:

где
D
– диаметр барабана,
 - окружная скорость вращения барабана
(даны в техническом задании).
- окружная скорость вращения барабана
(даны в техническом задании).
 мин-1.
мин-1.
1.5 Выбор электродвигателя
Для этого определим частоту вращения вала электродвигателя:

где
 =
5
- передаточное отношение быстроходной
передачи;
=
5
- передаточное отношение быстроходной
передачи;
 =
4 – передаточное отношение тихоходной
передачи;
=
4 – передаточное отношение тихоходной
передачи;
 =
5 - передаточное отношение открытой
цепной передачи.
=
5 - передаточное отношение открытой
цепной передачи.
Тогда:
 мин-1.
мин-1.
Для
расчетной мощности на валу Р1=1494
Вт
и частоты вращения
 =764
мин-1
определяю тип
электродвигателя. Наиболее подходящим
является двигатель АИР 100L8
(рисунок 2), с мощностью 1,5 кВт, синхронной
частотой 750 мин-1
и асинхронной частотой вращения 710
мин-1.
=764
мин-1
определяю тип
электродвигателя. Наиболее подходящим
является двигатель АИР 100L8
(рисунок 2), с мощностью 1,5 кВт, синхронной
частотой 750 мин-1
и асинхронной частотой вращения 710
мин-1.
Типоразмер двигателя выбираем по расчетной мощности Р1 и по намеченной частоте n1 вращения вала.
Рисунок 2 –
Габаритные и присоединительные размеры
электродвигателя АИР 100L8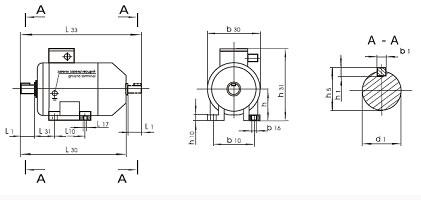
|
Тип |
L1 |
L10 |
L17 |
L21 |
L30* |
L31 |
L33 |
L39 |
b1 |
b10 |
b16 |
b30* |
h |
h1 |
h5 |
h10 |
h31* |
h37* |
d1 |
|
АИР100L8 |
60 |
140 |
12 |
14 |
391 |
63 |
455 |
0 |
8 |
160 |
16 |
226 |
100 |
7 |
31 |
12 |
246,5 |
140 |
28 |
Габаритные и присоединительные размеры
1.6 Определение передаточного отношения привода
На начальном этапе проектирования известны частоты nдв. и nвых. и мощности Рдв. и Рвых. валов двигателя и исполнительного механизма.
Уточняю передаточное отношение привода:


Нахожу передаточное отношение редуктора:


 =20
[1, стр. 693]
=20
[1, стр. 693]
Нахожу передаточное отношение открытой цепной передачи:

