

4.2. Назначение, состав и работа бау
БАУ предназнчена для приема команд управления и преобразования в механическое перемещение рулей, выдачи информации на НАУ о положении ракеты относительно линии визирования и фазе вращения ракеты. К БАУ относятся БРП, ПЛС, трассер.
Двухполярные модулированные по длительности прямоугольные импульсы напряжения U (рис. 13), выработанные НАУ и прошедшие через ПЛС, поступают на управляющий магнит 5 (рис. 3). В зависимости от полярности они вызывают отклонение якоря 9 управляющего магнита в ту или иную сторону на угол am (рис. 9) до упора якоря в сердечник 7 (рис. 3). При этом поворачивается жестко соединенный с якорем подвижный диск 1. При положительном импульсе управляющего напряжения U прорези верхней половины подвижного диска совмещаются с прорезями верхней половины неподвижного диска, а перемычки нижней половины подвижного диска перекрывают прорези нижней половины неподвижного диска.
Встречный воздушный поток, проходя через фильтрующую сетку, совмещенные прорези дисков и сопловые отверстия К, воздействует на чашку 4, поворачивая ее до упора в основание 3 на угол +dт (рис. 9).
При отрицательном импульсе управляющего напряжения U прорези нижней половины подвижного диска совмещаются с прорезями нижней половины неподвижного диска, а перемычки верхней половины подвижного диска перекрывают прорези верхней половины неподвижного диска. При таком взаимном положении дисков воздушный поток, проходя через совмещенные прорези дисков и сопловое отверстие, действует на другую половину чашки и поворачивает ее в противоположную сторону на угол минус dт (рис. 9).
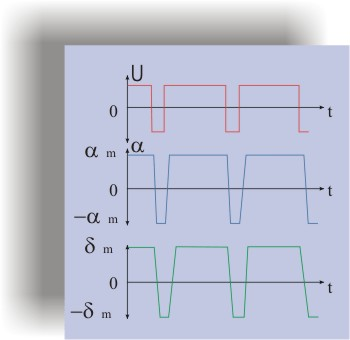
Рис. 9. Изменение импульсов напряжения, углов отклонения якоря и лопастей в БРП.
U - импульсы напряжения, поступающие на управляющий магнит БРП; αm – максимальный угол отклонения якоря управляющего магнита; δm - максимальный угол отклонения лопастей; t — время.
4.3. Пусковое устройство
4.2.1. Пусковое устройство предназначено для установки, закрепления и разворота снаряда 9М115 на цель, производства пуска и управления полётом снаряда до поражения цели.
4.2.2. Механизм пуска состоит из ударного, спускового и предохранительного механизмов, смонтированных на одном основании.
Механизм пуска предназначен для разбития капсюля батареи Т–457 и представляет собой механизм ударного типа, приводимый в действие пружиной.
На механизме спуска закреплён флажок, занимающий два фиксированных положения Поход и Боев. Постановка механизма на боевой взвод осуществляется вручную отведением рычага назад до отказа, при этом флажок должен находится в положении «Боев». Для того чтобы механизм спуска сработал, необходимо нажать на спусковой крючок. При этом ударник ударного механизма под действием пружины обеспечивает разбитие капсюля батареи Т–457.
Механизм пуска крепится к корпусу аппаратурного блока винтами.
5. ПРИНЦИП ДЕЙСТВИЯ КОПЛЕКСА
При пуске. После установки ракеты на пусковое устройство оператор визуально или с помощью визирного устройства ведет наблюдение в выделенном секторе обстрела. Обнаружив цель, оператор взводит механизм пуска и, следя за целью в визирное устройство с помощью механизмов наведения, совмещает центральный просвет сетки с центром цели.
При нажатии на спусковой крючок наносится удар по бойку на батарее питания. Боек разбивает капсюль батареи, она активируется и напряжение подается в НАУ, которая автоматически контролирует выход батареи на режим. С выходом батареи на режим НАУ подает напряжение на электрозапал передней крышки контейнера. Срабатывание электрозапала вызывает сброс передней крышки вправо вверх. Затем напряжение от НАУ подается для воспламенения заряда стартового двигателя. При воспламенении стартового заряда истекающие через сопла пороховые газы срывают заднюю крышку с контейнера, поджигают пиротехнический состав трассера и лучевой воспламенитель замедленного действия.
Под действием силы тяги стартовой ступени двигателя ракета 9М116 вылетает из контейнера со скоростью 90 м/с. Стартовая перегрузка вызывает срабатывание инерционного замыкателя и включение предохранительно-исполнительного механизма боевой части ракеты. Во время вылета ракеты из контейнера, под действием сил упругости, консоли стабилизатора раскрываются, отбрасывая удерживающие их стяжку и флажок. При этом хомутик с трассером перемещается по ленте на концевую кромку консоли и фиксируется на ней.
После удаления ракеты от пускового устройства на расстояние около десяти метров лучевой воспламенитель замедленного действия поджигает воспламенитель разгонно-маршевого заряда, а тот, в свою очередь, срабатывая, разгоняет ракету до скорости 180 м/с.
Провод линии связи, закрепленный одним концом на контейнере, сматывается с катушки, установленной на ракете. В процессе полета ракеты оператор продолжает удерживать центральный просвет сетки визирного устройства на центре цели.
На полете. После старта ракета попадает в поле зрения оптико-механического координатора, который с помощью широкопольного пеленгационного канала контролирует положение светового пятна трассера относительно оптической оси объектива. Это положение соответствует текущему угловому отклонению трассера от линии визирования. При этом угловое отклонение зависит от линейного отклонения ракеты от линии визирования и текущей дальности. В соответствии с этим происходит преобразование команд управления. Команды, соответствующие линейному отклонению ракеты от линии визирования, преобразуются в суммарные команды управления по каналам курса и тангажа с учетом угла крена ракеты. Эти команды поступают на выходные каскады блока управления, усиливаются по амплитуде и передаются по проводам на ракету в виде знакопеременных импульсов поочередно: по курсу, когда аэродинамическими лопастями блока рулевого привода создается управляющий момент в горизонтальной плоскости, и по тангажу, когда этими же лопастями создается управляющий момент в вертикальной плоскости.
На ракете команды управления поступают непосредственно в блок рулевого привода. Электромагнитная система блока рулевого привода, управляя распределением набегающего потока воздуха в рабочие полости привода, обеспечивает отклонение аэродинамических лопастей в одно из двух крайних положений. Направление отклонения и время нахождения в крайнем положений аэродинамических лопастей соответствует знаку и величине командного сигнала по подключенному в данный момент к блоку рулевого привода каналу управления.
Отклонение аэродинамических лопастей приводят к появлению управляющих моментов относительно центра тяжести ракеты. В результате этого ракета смещается к линии визирования.
Степень воздействия определяется величинами команд управления.
Через 1,5 с после старта ракеты блок дальности выдает команду на переключение полосы пропускания усилителя фототока. Сужение полосы пропускания повышает устойчивость систем от фоновых и аппаратурных шумов.
Через 2,15 с по команде с блока дальности происходит переключение усилителя фототока с широкопольного на узкопольный пеленгационный канал. Уменьшение поля зрения позволяет уменьшить фоновые засветки и исключить влияние посторонних излучателей.
При встрече с преградой. При ударе ракеты о цель ее носовая часть деформируется, что приводит к срабатыванию предохранительно-исполнительного механизма, который обеспечивает дистанацию заряда боевой части. Возникающая кумулятивная струя поражает цель.
6. СИСТЕМА НАВЕДЕНИЯ
Провод линии связи, закреплённый одним концом на контейнере, сматывается с катушки, установленной на снаряде. В процессе полёта снаряда оператор продолжает удерживать центральный просвет сетки визирного устройства на центре цели.
В течение полёта снаряда наземная аппаратура управления принимает и автоматически преобразует инфракрасное излучение от трассёра в электрические сигналы, соответствующие линейным координатам центра массы текущему углу крена снаряда в системе координат, связанной с пусковым устройством. В НАУ происходит формирование команд управление снарядом в подвижной, связанной со снарядом системе координат, и выдача этих команд в двухпроводную линию связи поступают непосредственно в блок рулевого привода снаряда.
6.1. Для управления снарядом в полёте используется одноканальная командная полуавтоматическая система управления с упрощённой аппаратурой на борту снаряда. Командная полуавтоматическая система управления включает в себя замкнутый контур ручного отслеживания цели, основным звеном которого является оператор, и замкнутый одноканальный контур автоматического управления. Замкнутый контур ручного отслеживания цели обеспечивает постоянство наведения на цель линии визирования (оптической оси визирного устройства). При этом оператор плечом или посредством подъёмного и поворотного механизмов плавно поворачивает пусковое устройство так, чтобы центральный просвет сетки визирного устройства был совмещён с центром цели. Замкнутый одноканальный контур автоматического управления обеспечивает подачу на блок рулевого привода снаряда команд, определяющих устойчивое движение снаряда по линии визирования.
6.2. Входным сигналом замкнутого контура автоматического управления является угловое отклонение трассёра Етр от линии визирования. Для передачи информации о величине и направлении углового отклонения используется оптический тракт, который включает в себя пиротехнический трассёр, воздушную среду и оптические системы оптико-механического координатора (ОМК).
6.3. Излучение трассёра принимается и преобразуется оптико-механическим координатором, входящим в состав прибора 9С816. ОМК выполняет функции чувствительного элемента контура управления.
Объектив ОМК, съюстированный с визирным устройством, фокусирует излучение трассёра на подвижный модулирующий диск.
Модулирующий диск имеет чередующиеся прозрачные и непрозрачные секторы, вызывающие частотную модуляцию изображения трассёра на фотоприёмнике. Фотоприёмник преобразует изменение светового сигнала в изменение электрического напряжения. Электрический сигнал с фотоприёмника, несущий информацию об угловых координатах центра масс ракеты и угла её крена в системе координат, связанной с пусковым устройством, поступает на блок координатора.
6.4. Блок координатора преобразует этот сигнал в два напряжения, первое из которых пропорционально линейному отклонению трассера от линии визирования цели в вертикальной плоскости (по каналу тангажа) и углу наклона крена, а второе–линейному отклонению в горизонтальной плоскости (по каналу курса) и углу крена.
6.5. Из блока координатора эти напряжения поступают в блок формирования команд. Здесь сигналы управления корректируются с целью получения необходимых характеристик контура управления и с помощью выделенных сигналов крена преобразуются в широтно-импульсные команды управления по каналам курса и тангажа. Здесь же команда по тангажу суммируется с командой программной компенсации веса ракеты.
Далее сигнал через блок фильтров поступает на блок управления, где вырабатываются команды управления положением центра масс ракет по курсу и тангажу с учетом текущего угла крена.
6.6. В выходных каскадах блока управления команды усиливаются до мощности, необходимой для передачи по проводной линии связи и отработки блоком рулевого привода ракеты.
Усиленные команды управления по курсу и тангажу в знакопеременных импульсов передаются на ракету поочередно: по курсу, в то время, когда рули занимают положение близкое к вертикальному, и по тангажу, когда рули занимают положение близкое к горизонтальному.
6.7. На ракете команды управления поступают непосредственно в блок рулевого привода. Электромагнитная система БРП, управляемая распределением набегающего потока воздуха в рабочие полости привода, обеспечивает отклонение рулей в одно из двух крайних положений. При этом направление отклонения и время нахождения в данном крайнем положении соответствует знаку и величине команды по подключенному к БРП каналу управления (по курсу или по тангажу).
Разностное время выдержки на упорах по каждому из каналов управления определяет величины управляющего воздействия рулей соответственно по каналам курса и тангажа.
6.8. Отклонения рулей приводят в возникновению управляющих моментов относительно центра масс ракеты. В результате этого под действием аэродинамических сил от встречного потока воздуха и тяги маршевой ступени двигателя происходит смещение ракеты к линии визирования, т.е. уменьшения отклонения центра масс ракеты от линии визирования.
Таким образом, ракета, как объект управления, отрабатывает управляющие воздействия контура управления. Степень воздействия определяется величинами команд управления.
Уменьшение отклонения центра масс ракеты вызывает соответствующее уменьшение текущего значения линейного отклонения трассера от линии визирования.
Пропорционально уменьшается и текущее значение углового отклонения трассера от линии визирования (относительно объектива ОМК).
6.9. Оптический тракт, передающий излучение трассера ракеты, осуществляет функцию звена обратной связи контура управления.
Обратная связь обеспечивает передачу на вход контура управления (оптико-механический координатор) сигнала, соответствующего текущему значению углового отклонения трассера от линии визирования. Величины же текущих отклонений трассера находятся в прямой зависимости от положения центра масс ракеты и, следовательно, от управляющего воздействия на нее. Происходит замыкание контура управления.
6.10. В результате разворота линии визирования при наведении ракет на подвижные цели, а так же в результате действия на ракету различных возмущений (например, ветра, взрывной волны), снова возникают отклонения ракеты от линии визирования, которые устраняются описанным выше способом.
При этом регулирующее воздействие устойчиво замкнутого контура автоматического управления направлено на быстрое уменьшение возникшего отклонения трассера от линии визирования.
Таким образом, замкнутый контур управления обеспечивает устойчивый полёт ракеты по линия визирования, а система управления ракетой в целом–наведение её на цель.