

1.3.4. Термоэлектрические ип.
Термопара-сплав двух разнородных металлов.
Не линейны (5%), плохая повторяемость, но не нужен источник питания, маленькая чувствительность, одно из мест споя требует постоянной температуры.
Лекция 5 _Бабошин_OFF
1.3.2.2. Индукционные преобразователи
Состоят из магнитной системы, включающую в себя постоянный магнит, магнитопровод и катушку индуктивности. Причём и магнит и катушка индуктивности могут быть не в единственно числе, а магнитопровод может иметь самую изощрённую форму. Индукционный ИП преобразует в ЭДС скорость перемещения (углового или линейного). Т.е., при статическом состоянии магнитной системы (dx/dt = 0) ЭДС, имеющая место на выводах катушки индуктивности, практически равна нулю.
Принцип действия индукционных ИП основан на законе электромагнитной индукции, в соответствии с которым ЭДС индуцируется в катушке при изменении магнитного потока через витки катушки. При этом исходный магнитный поток задаётся постоянным магнитом ИП.
Закон электромагнитной индукции может быть дополнен следующей формулировкой: величина индуцируемой в катушке ЭДС определяется скоростью изменения магнитного потока через неё и пропорциональна числу витков катушки. Т.е.:
![]() ,
(9)
,
(9)
где E – ЭДС, ώ – число витков катушки, Ф – величина магнитного потока.
Индукционные ИП Классификационно можно разделить на 2 группы:
-
С перемещением катушки относительно постоянного магнита;
-
С перемещением ферромагнитного элемента относительно неподвижной катушки и магнита.
Рисунок 20 предлагает к рассмотрению классические конструктивы индукционных преобразователей.
а)
б)
Лапшин-?
г)
в)
Рис. 20. Примеры индукционных ИП
ИП, показанные на рисунках 20 а), б), относятся к первой классификационной группе.
ИП по рисунку 20 а) служит для преобразования скорости линейного перемещения. В его конструкции: 1 – магнитопровод; 2 – постоянный магнит с полюсным наконечником; 3 – подвижная катушка индуктивности. Должно быть очевидным, что все элементы такого ИП имеют «токарные» формы. Возможен и вариант, при котором цилиндрический постоянный магнит будет заменён на плоский дисковой формы магнит, размещённый по торцу магнитопровода. При этом магнитопровод будет цельным и, практически, броневым.
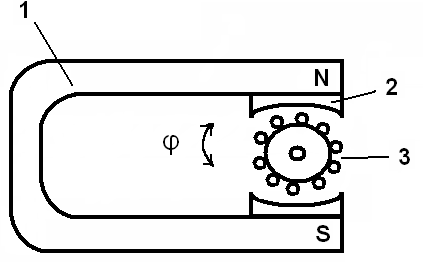
ИП, представленный рисунком 20 б), преобразует в ЭДС скорость угловых перемещений. Конструктив: 1 – постоянный магнит «классической» дугообразной формы; 2 – полюсные наконечники; 3 – подвижная катушка. Следует отметить, что угол поворота подвижных элементов такой системы более 180° вряд ли целесообразен. В практических конструкциях данный угол поворота механически ограничен. Данная конструкция, пожалуй, получила наиболее широкое практическое распространение из индукционных преобразователей. Причём, как в истории работы с электричеством, так и по настоящее время. Практическим примером использования этого преобразователя в качестве ИП является его применение в охранной сигнализации автомобилей. Это, так называемый датчик динамики. Изменениями веса груза подвижной системы и степени её демпфирования (регулировочный винт) можно изменять порог чувствительности такого датчика. Как и многие другие преобразователи имеют возможность изменения направления прохождения сигнала (вход объекта меняется с выходом). Для рассматриваемо варианта преобразователя при подаче постоянного напряжении на катушку произойдёт отклонение подвижной системы на угол, зависящий и от силы тока через катушку. Это свойство данных преобразователей используется для построения МИМ (магнитоэлектрических измерительных механизмов). Это стрелочные (шкальные) приборы отображения информации. МИМ до сих пор используются при измерении силы тока, напряжения и др. Например, отображение уровня топлива в баке автомобиля (см. п.п. 1.3.1.1.) производится именно МИМ (по крайней мере, в классическом российском варианте).
ИП, показанные на рисунках 20 в), г), относятся ко второй классификационной группе.
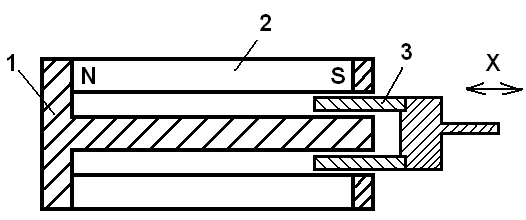
ИП по рисунку 20 в) является преобразователем соленоидного типа и служит для преобразования скорости линейного перемещения. В его конструкции: 1 – неподвижная катушка индуктивности магнитопровод; 2 – подвижный ферромагнитный сердечник с постоянным магнитом; 3 – каркас катушки индуктивности. Должно быть очевидным, что все элементы такого ИП так же имеют «токарные» формы. Возможны различные конструктивные варианты исполнения подобного ИП. В частности, возможна и реализация магнитопровода в системе с постоянным магнитом.
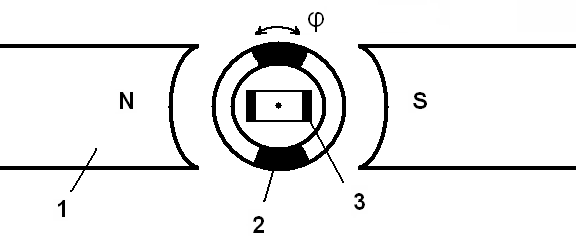
ИП, представленный рисунком 20 г), преобразует в ЭДС скорость угловых перемещений. Конструктив: 1 – постоянный магнит «классической» дугообразной формы; 2 – подвижный ферромагнитный элемент; 3 – неподвижная катушка. Подвижным элементом может быть, например немагнитный цилиндр на оси вращения с ферромагнитными элементами. Угол поворота, в отличие от ранее рассмотренного ИП, не ограничен. Очевидно, что такой ИП может быть использован в качестве датчика импульсов.
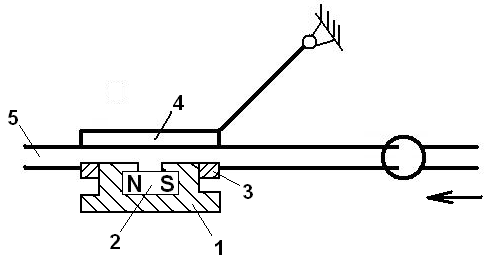
На рисунке 21, а) отображена основная идея конструктивного решения, позволившего использовать индукционный преобразователь для построения датчика обнаружения шва ткани. В текстильном отделочном производстве большинство процессов обработки ткани идёт непрерывно. Для этого куски ткани – результат ткацкого производства сшиваются между собой. Как результат – имеет место утолщение (шов). Для того, чтобы рабочие органы отделочного оборудования (например, каландры, отжимные валы, стригальные цилиндры) не повредили шов, т.е., не прервали процесс движения ткани через отделочное оборудование, необходимо разведение рабочих органов при прохождении шва.
Такие датчики разных конструктивов разрабатывались в ИвТИ с начала 60-х.х. годов прошлого века. АСУ с их использованием (так же – разработка ИвТИ, авторы – А. К. Расторгуев и др.) работали на текстильных предприятиях СССР около 30 – ти лет.
У этого датчика 1, 2, 3 – магнитная система, включающая катушки индуктивности, 4 – набор стальных лапок, прижатых к ткани 5 и имеющих возможность вертикального перемещения. Базовый принцип работы должен быть очевиден – проходящий шов подбрасывает подвижные ферромагнитные элементы вверх и т.д.
б)

в)
г)
Рис. 21. Примеры промышленных индукционных датчиков с подвижным ферромагнитным элементом: а – датчик обнаружения шва ткани; б – импульсный датчик частоты вращения; в - импульсный датчик расхода жидкости или газа
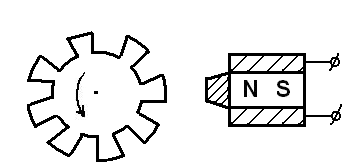
Принцип работы датчика импульсов, показанного на рисунке 21, б очевиден. Его ЧЭ является зубчатое колесо из ферромагнетика. С осью вращения ЧЭ связан механизм, угловая скорость которого контролируется. Вблизи наружного радиуса ЧЭ распложен индукционный ИП (в определённой мере аналог магнитной головки). Примерный вид осциллограммы выходного сигнала датчика показан на рисунке 21, г. Причем прямоугольникам одинаковой амплитуды соответствует откампарированный средствами электроники сигнал.
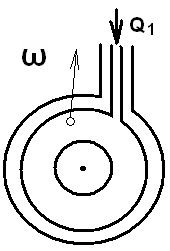
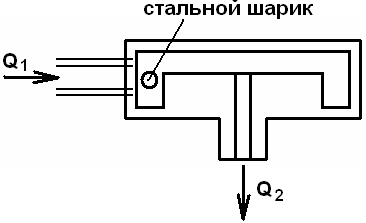
На далёком от совершенства рисунке 21, в изображён разработанный Д. Д. Ветчининым (детальный конструктив, опытная партия образцов) датчик расхода жидкости или газа. Датчик имеет неферромагнитный корпус, внутри которого имеет место замкнутый концентрический канал. Входной поток Q1 поступает в канал через штуцер, расположенный сбоку корпуса и под определённым углом к каналу. Выходной поток Q2 выбрасывается из датчика через штуцер внизу корпуса. Внутри канала расположен ЧЭ датчика - стальной шарик. При прохождении через датчик среды, расход которой контролируется, ЧЭ совершает непрерывное движение по замкнутой окружности. Скорость движения функционально связана с расходом. ИП датчика на рисунке 21, в не показан. Он расположен на верхней крышке датчика, имеет стержневой магнитопровод с расположенной на нём катушкой индуктивности. Полюсным наконечником этой магнитной системы является зубчатое колесо, размещённое в непосредственной близости от канала датчика. Вертикальные оси корпуса датчика и его магнитной системы совпадают. Вид выходного сигнала – рисунок 21, г.
П
а)
Примерами использования индукционного ИП в ПК являются:
1. Спикер (микрофон), ЧЭ которого является ферромагнитная мембрана, а ИП – индукционный преобразователь (следует отметить, что микрофоны могут использовать электростатические и пьезоэлектрические ИП).
2. Головки записи/воспроизведения на магнитные диски традиционно использовали и используют индукционные ИП. В последнее время подход несколько изменился, впрочем, это напоминает обратный переход от универсальных головок аналоговых магнитофонов к их старинным предшественникам, имеющим отдельные головки записи и воспроизведения. Для уплотнения записи на HDD в последние годы так же используются раздельные головки. Их основой служат: для записи и стирания – индукционный ИП; для считывания – магниторезистивный ИП (индукционный ИП всё же слишком инерционен для желаемых скоростей приводов HDD из за своей «привязки» к скорости изменения магнитного потока).
3. Звуковые динамики ПК так же используют индукционный преобразователь, правда, не в качестве ИП (см. ранее).