

1.2.2. Структурные схемы датчиков
Классификационно имеют место два базовых метода измерительного преобразования.
-
Метод прямого преобразования.
-
Метод уравновешивающего преобразования (компенсационный метод).
Примечание: не следует отождествлять метод прямого преобразования с используемым в «Метрологии» методом непосредственного отсчёта. Приводимый в этой учебной дисциплине пример «непосредственного» отсчёта контролируемой температуры по шкале жидкостного термометра, с нашей точки зрения достаточно неадекватен. В самом деле, при таком измерении имеет место последовательность «косвенных» ИП – ей, первым из которых является ЧЭ средства измерения – капиллярная трубка с жидкостью (ртутью).
В соответствии с предложенной классификацией базовых методов измерительного преобразования рисунком 7 представлены базовые же структурные схемы построения датчиков. Каскадная схема (Рис. 7,а) отображает метод прямого преобразования. Суть этого метода и, как следствие, структуры датчика его реализующей – последовательное объединение ряда преобразователей. Исходя из этого, может использоваться термин – последовательностная схема. Должно быть очевидным, что большинство измерительных устройств построено именно по этой схеме.

а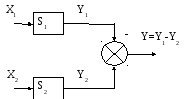 )
)
б)

в)
Рис. 7. Структурные схемы ПИП, а) - каскадная схема,
б) - дифференциальная схема, в) – схема с ОС
Дифференциальная (разностная) схема, показанная на рисунке 7, б), так же реализует метод прямого преобразования. Она должна иметь либо два ЧЭ (S1 и S2 на рисунке 7, б), либо разностный (дифференциальный) ЧЭ. В принципе, суть работы схемы от этого не зависит. Ей необходима измерительная схема, вычитающая сигналы двух ЧЭ с дальнейшей их обработкой. Либо – измерительная схема, обрабатывающая сигнал дифференциального ЧЭ. Приводимый ранее пример психрометра реализует дифференциальную схему измерения влажности. Измерительной схемой в нём является измерительная установка.
Дифференциальная измерительная схема с электрическим выходом, как правило, использует разностный дифференциальный датчик. Удобными для учебного рассмотрения примерами таких датчиков являются емкостной и индуктивный (индукционный) ЧЭ с самыми разнообразными вариантами конструктивного построения (см. п.п. 1.3.1). К существенным преимуществам этой схемы можно отнести следующее:
-
Позволяет линеаризовать характеристику ИП, то есть сделать ее более линейной.
-
Позволяет уменьшить влияние на выходную величину неинформативных факторов (помех).
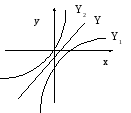
Рис. 8. Пример линеаризации статической характеристики ПИП при реализации дифференциальной схемы
Дифференциальная схема имеет еще 2 варианта построения:
-
Логометрический. При этом методе дифференцирование заменяется на деление.
-
Логарифмический. При реализации этого варианта для дифференцирования используются не сами значения выходных величин Y1, Y2, а их логарифмы, то есть lgY1, lgY2.
В заключение кратко рассмотрим компенсационный метод (метод сравнения с мерой). Суть этого метода заключается в том, что преобразуемая величина сравнивается с другой величиной, чаще всего эталонной. Сравнение этих двух величин реализуется за счёт использования в измерительной схеме ОС (Рис 7, в).
Отсчет выходной величины при использовании компенсационного метода может вестись двумя способами:
-
По установке на ноль.
-
Шкала по отклонению от нуля.
Простейшим примером измерительной системы, использующей компенсационный метод, могут служить рычажные весы. Причём, как правило, отсчёт измеряемого веса в них производится обоими способами. Эталонными величинами является набор грузов.
Примечание: естественно, датчики, как и любые другие объекты жизнедеятельности, функционируют во времени – никакой известный на настоящий момент процесс не происходит мгновенно. Развертывание процессов во времени математически представляется временными (динамическими) характеристиками объектов. Динамические характеристики с позиций ТАУ представляются переходными и частотными характеристиками. Переходная характеристика датчика (его «динамика» во времени) – это зависимость изменения выходной величины ИП от вызвавшего его изменения входной величины во времени. Динамика ИП (как и любого другого устройства) может быть представлена математическими моделями (системы дифференциальных и интегральных уравнений). Для инженеров удобной формой работы с такими моделями являются типовые динамические звенья ТАУ. В качестве примера рассмотрим ИП – терморезистор (см. п.п. 1.3.1). Он с достаточной точностью моделируется апериодическим звеном 1-го порядка. Постоянная времени таких ИП варьируется от секунд до десятков минут (определяется конструктивом ИП). Для повышения точности расчета работы терморезистора во времени возможно использование последовательного соединения звена запаздывания и апериодического звена первого порядка или апериодического звена второго порядка.