

Технічна характеристика евм мео-1,6
ЕВМ постачений гальмом, ручним приводом, блоком датчиків і кінцевих вимикачів. Його технічні дані наведені в табл.3.
У механізмах типів МЕО-1,6, що виробляе СЗЕИМ, як привод використовується мало інерційний асинхронний електродвигун типу ДАУ-4. Зубчаста передача редуктора складається із прямозубих циліндричних коліс, що забезпечують необхідне передаточне відношення.
ЧЗЕИМ випускає ці механізми, побудовані на базі синхронного редукторного двигуна типу ДСР і черв'ячної передачі. Ці механізми оснащені блоками сигналізації положення й мають підвищену надійність і збільшений термін служби. Як датчики зворотного зв'язку в ЕИМ використовуються блоки типів БДИ-6, БДР-П, БСПТ, БСПИ.
Т а б л и ц я 3
Технічна характеристика евм мео-1,6/25-0,63
|
Параметри механізму |
МЕО-1,6/25-0,63 |
|
Номінальний крутний момент на вихідному валу, Н• м |
1,6 |
|
Номінальний час повного ходу вихідного вала, с |
25 |
|
Номінальний, повний хід вихідного вала, обертів |
0,25 |
|
Частота увімкнень |
300 |
|
Напруга живлення, В |
220 |
|
Споживана потужність, В-А, не більше |
25 |
|
Температура навколишнього середовища, °С |
5—50 |
|
Габаритні розміри, мм |
234*234*213 |
|
Маса, кГ |
10 |
Принципова електрична схема механізму МЕО-1,6. наведена на рис.18.
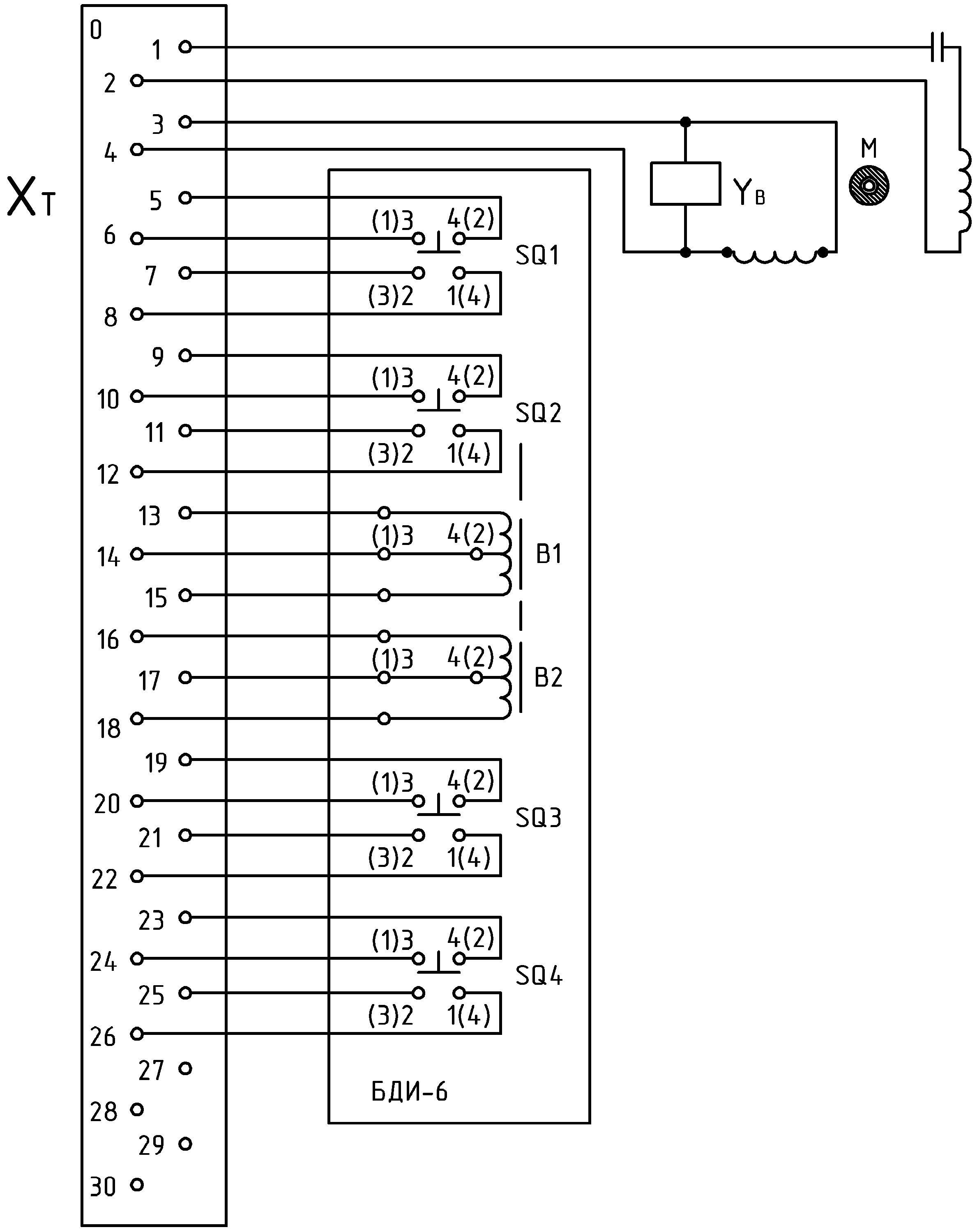
Рис. 18. Принципова електрична схема механізму типу МЕО-1,6: В1 й В2 — датчики індуктивні; YB — електромагнітне гальмо; SQ1—SQ4 — кінцеві вимикачі; XT— клемник; М — електродвигун
Габаритні розміри цього механізму наведені на рис.19.
Механізми, що випускають СЗЕИМ, оснащуються блоками сигналізації положення з індуктивним (БДИ-6) або реостатним (БДР-П) датчиком положення вихідного органа.
Блок сигналізації положення типу БДИ-6 складається із двох індуктивних датчиків переміщення, профільного кулачка, чотирьох мікровимикачів із чотирма кулачками. Індуктивний датчик складається із двох однакових котушок, у полі яких переміщається сердечник.
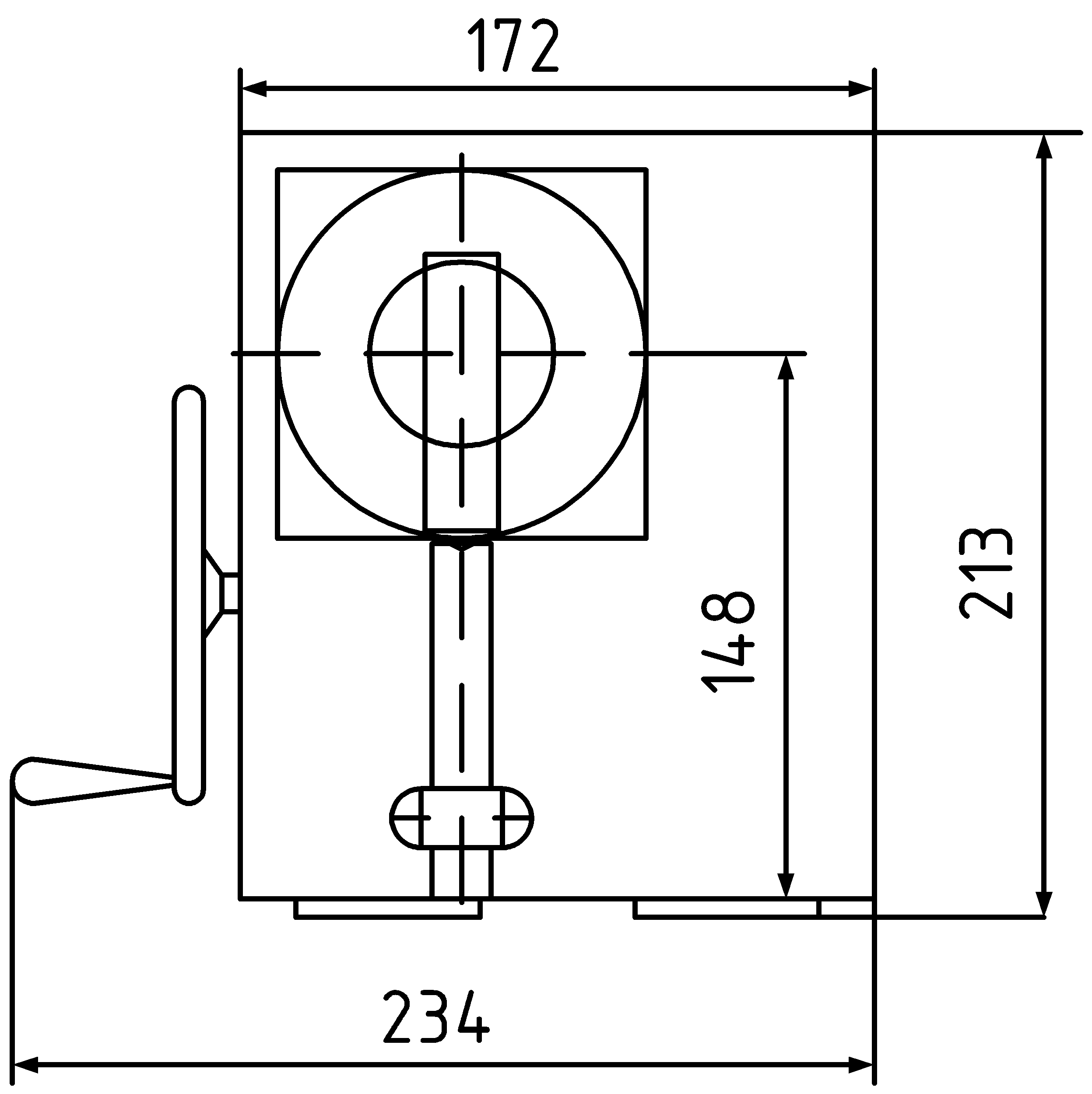
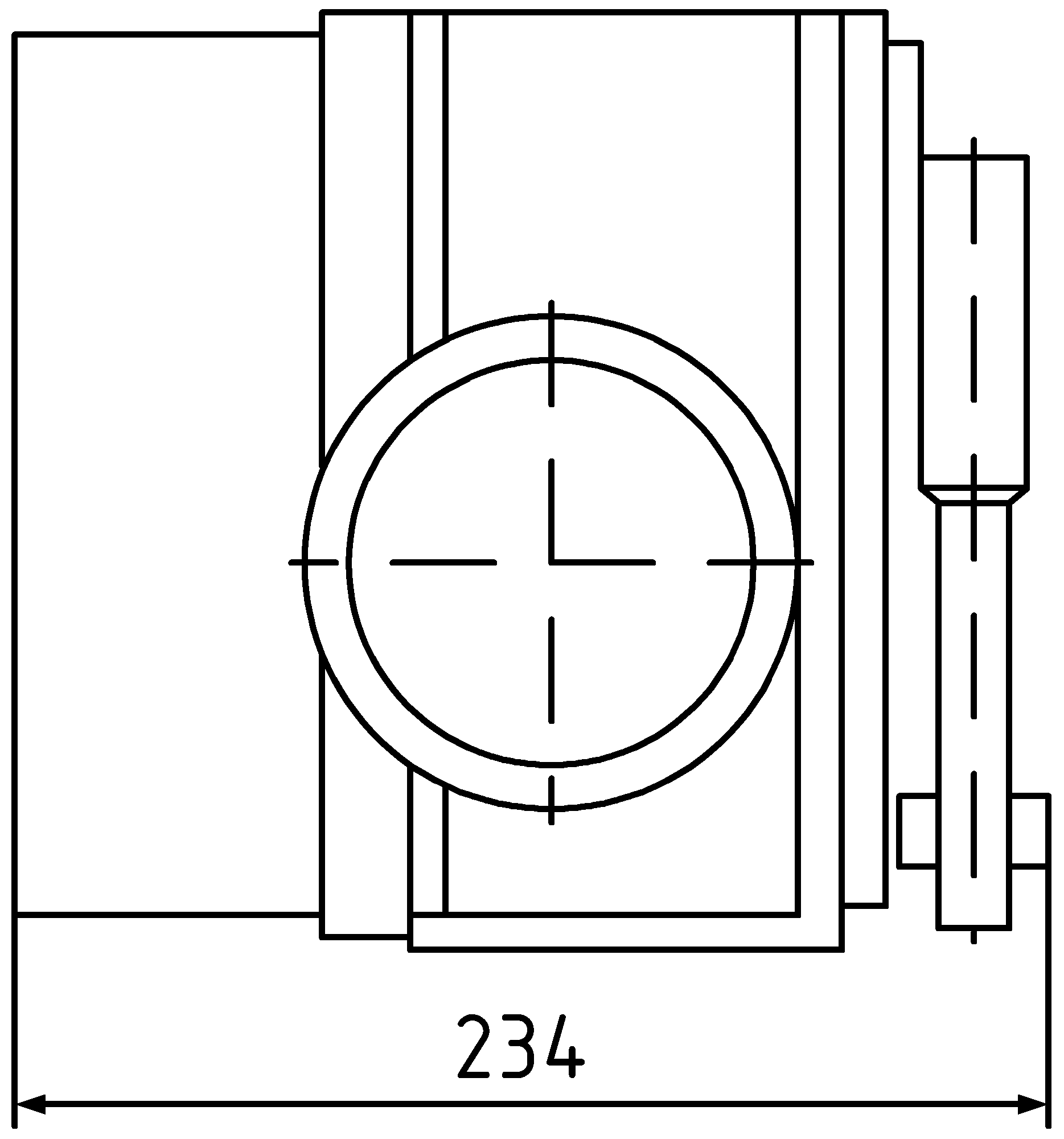
Рис.19. Габаритне креслення механізмів типів МЕО-1,6
Технічні дані блоку сигналізації положення типу бди-6
Робочий хід сердечника датчика, мм 5
Вихідний сигнал, мВ не менш 625
Нелінійність, % не більше 3
Живлення від джерела постійного струму:
напруга, В 12
частота, Гц 50
Блок сигналізації положення типу БДР - відрізняється від описаного вище блоку тим, що в ньому замість індуктивних датчиків використають чотири реостати зі струмознімачем і контактними кільцями. Передбачено роботу на двох реостатах у діапазоні кутів 0-90° або 0-240°.
Керування механізмами здійснюється тільки від контактної апаратури.
Порядок виконання роботи
1. Вивчити принцип роботи й конструкцію електричного виконавчого механізму МЕО-1,6, використовуючи опис і реальну конструкцію механізму, застосовуваного в лабораторній установці. При відсутності подачі живлення мережі оцінити вручну рухливість вихідного важеля ВМ при повороті, зусилля страгивания з початкового положення.
2. Підготувати ВМ до роботи, для чого:
-перевірити підключення приладу регулюючого Р25.1 й індикатора положення виконавчого механізму;
- установити зони безпеки при роботі механізму;
- увімкнути електроживлення, натиснувши кнопку МЕРЕЖА. На пульті загоряється лампочка МЕРЕЖА;
- поставити перемикач режимів у положення РУЧНА РОБОТА;
- у режимі РУЧНЕ КЕРУВАННЯ перевірити роботу механізму, зробивши 5 - 6 повторень на кожному русі, рухи повинні виконуватися без збоїв і затирань.
3. Послідовно в режимі ручного керування забезпечити 5-6 ратне виконання команд прямого й зворотного напрямків руху, вимірюючи величину ходу й час виконання рухів. Розрахувати швидкість виконання рухів. Визначити диференціал ходу.
4. Переміщаючи вихідний важіль у крайні положення спостерігати включення світлодіодів, і, вимірюючи положення важеля, визначити диференціал ходу при вимиканні механізму.
5. Установлюючи задатчиком величини переміщень спостерігати їхнє відпрацьовування й реєструвати точність переміщень. Побудувати графік зміни точності переміщень залежно від величини ходу.
6. Установити перемикач у режим АВТОМАТ. Установлюючи задатчиком величини переміщень спостерігати їхнє відпрацьовування й реєструвати точність переміщень. Побудувати графік зміни точності переміщень залежно від величини ходу.
7. Результати випробувань систематизувати й оформити у виді таблиць і графіків.
Зміст звіту
1. Назва й мета роботи.
2. Ескіз виконавчого механізму МЕО 1,6 і його технічна характеристика.
3. Технічна характеристика блоку сигналізації положення типу БДИ-6.
4. Принципова електрична схема механізму МЕО-1,6.
5. Протокол перевірки основних характеристик виконавчого механізму, розрахункові формули, графіки й результати розрахунку.
6. Аналіз результатів і виводи.