2.4. Определение суммарного приведенного момента
Находим значение суммарного приведенного момента по формуле:
 ,
где
,
где
 -
приведенный момент движущих сил;
-
приведенный момент движущих сил;
 -
приведенный момент сил сопротивления.
-
приведенный момент сил сопротивления.
Приведенный
момент сил сопротивления, заменяющий
силу сопротивления
 ,
определяем в каждом положении механизма
по формуле:
,
определяем в каждом положении механизма
по формуле:
![]()
Приведенными
моментами сил сопротивления от звеньев
1, 2, 3 и 5 пренебрегаем, так как значения
величин
 ,
,
 ,
,
 и
и
 очень малы по сравнению с силами
сопротивления.
очень малы по сравнению с силами
сопротивления.
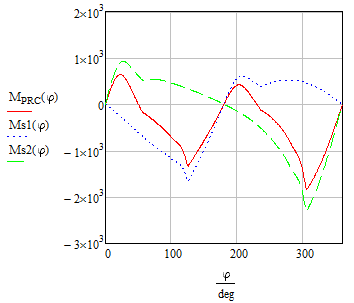
Приведенный
момент движущих сил равен
равен
 -
угловая координата коленчатого вала.
-
угловая координата коленчатого вала.
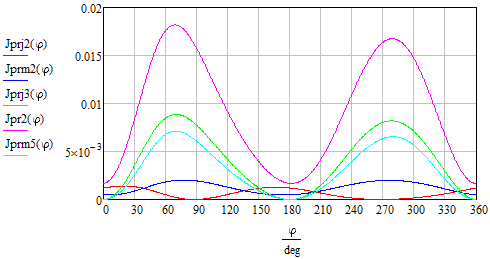
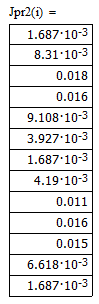
Расчет приведенных моментов ведется в программе «MathCAD» (см. Приложение 1).
2.5. Определение суммарного приведенного момента инерции звеньев II группы
Сумма
приведенных моментов инерции звеньев,
совершающих плоское, возвратно-поступательное
и возвратно-вращательное движения,
является величиной переменной и
обозначается
 – сумма приведенных моментов инерции
II группы звеньев, связанных со звеном
приведения переменными передаточными
функциями скорости и передаточными
отношениями. Во вторую группу звеньев
входят коромысло 8, 9, 10 и ползун 11. Расчет
значений приведенных моментов инерций
в зависимости от угла поворота ведем с
помощью программы MathCad
(см. Приложение 1). Результаты заносим в
таблицу 2.4.
– сумма приведенных моментов инерции
II группы звеньев, связанных со звеном
приведения переменными передаточными
функциями скорости и передаточными
отношениями. Во вторую группу звеньев
входят коромысло 8, 9, 10 и ползун 11. Расчет
значений приведенных моментов инерций
в зависимости от угла поворота ведем с
помощью программы MathCad
(см. Приложение 1). Результаты заносим в
таблицу 2.4.
Примечание: приведенный момент инерции звена 1 не учитываем (его момент инерции мал)
Таблица
2.4
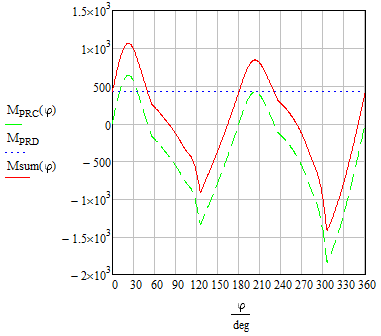
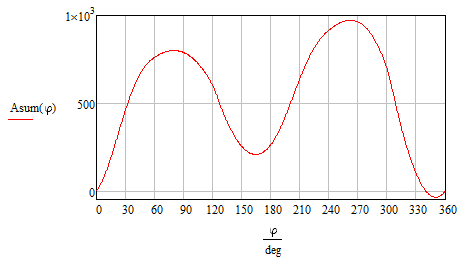
2.6. Построение графика суммарной работы
Суммарная
работа
 всех сил равна работе
всех сил равна работе
 :
:
График
 строим в программе MathCad.
строим в программе MathCad.
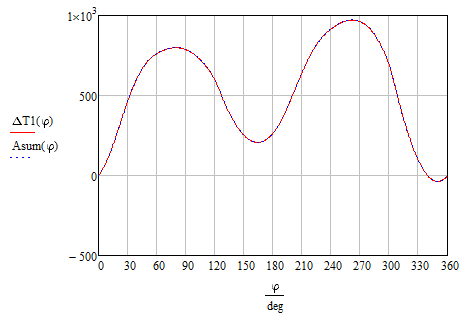
2.7. Построение графиков кинетической энергии
Решение задачи для компрессора, работающего в установившемся режиме, осуществим методом Мерцалова. Кинетическая энергия и работа связана следующим соотношением:
 ;
;
Таким
образом, принимая во внимание, что отсчет
графиков кинетической энергии и суммарной
работы не совпадают (и отличаются на
величину
![]() ),
имеем примерный график кинетической
энергии.
),
имеем примерный график кинетической
энергии.
 ,
где
,
где
 -
кинетическая энергия I
группы звеньев;
-
кинетическая энергия I
группы звеньев;
 -
кинетическая энергия II
группы звеньев.
-
кинетическая энергия II
группы звеньев.
График
 приближенно получаем из графика
приближенно получаем из графика
 ,
пересчитывая следующим образом:
,
пересчитывая следующим образом:
 ,
где
,
где

Из
соотношения
 находим график
находим график
 ,
вычитая необходимые графики, сведенные
в один масштаб. Затем находим:
,
вычитая необходимые графики, сведенные
в один масштаб. Затем находим:

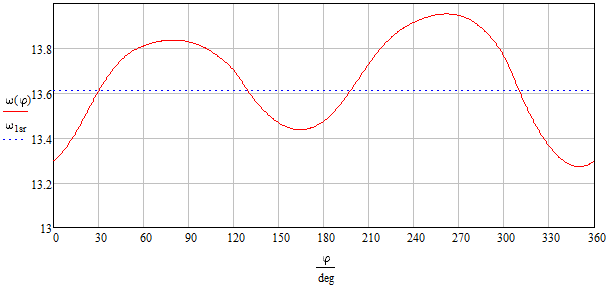
2.8. Построение графика угловой скорости звена приведения
Из теоремы об изменении кинетической энергии:
 ,
где
,
где
 -
кинетическая энергия системы при угле
звена приведения
-
кинетическая энергия системы при угле
звена приведения ;
;
 -
кинетическая энергия системы в начальный
момент, времени при угле
-
кинетическая энергия системы в начальный
момент, времени при угле
 ;
;
 -
работа, совершаемая над системой.
-
работа, совершаемая над системой.
Подставляя
выражения для
 и
и
 в уравнение теоремы об изменении
кинетической энергии, и разрешая его
относительно
в уравнение теоремы об изменении
кинетической энергии, и разрешая его
относительно
 ,
получаем
,
получаем
График угловой скорости звена приведения строим с помощью программы MathCad (см. Приложение 1).
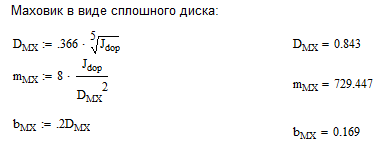
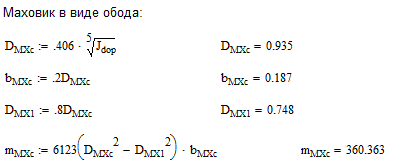
Определим дополнительную маховую массу по формуле:
![]() Получим
Jmax=64.78
Н*м
Получим
Jmax=64.78
Н*м
3. Силовой расчет механизма
Силовой расчет механизма заключается в определении тех
сил, которые действуют на отдельные звенья механизмов при их движении. Для этого применяют метод кинетостатики, то есть останавливают механизм, прикладывая к нему силы инерции. Сущность этого метода сводится к применению при решении задач динамики уравнений равновесия в форме Даламбера.
3.1 Исходные данные для силового расчета механизма
Угловая
координата кривошипа для силового
расчёта
 =
300°
=
300°
В заданном положении механизма угловая скорость равна:

Угловое ускорение:
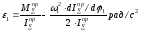
Значение ε1 посчитаем с помощью программы MathCad (см. Приложение 1)

3.2. Построение планов скоростей и ускорений
Линейную скорость точки A звена 7 находим по формуле для вращательного движения

Определим масштаб плана скоростей:

Для
звена 2 записываем:

из графического решения этого уравнения устанавливаем значения скорости


Скорость точки D равна скорости точки B:
Для определения скорости точки F звена 5 составим векторное уравнение сложного движения:

из графического решения этого уравнения находим значения скорости:

Пропорционально разобьем отрезок ab для нахождения на плане точки s2 и соответствующей ей скорости:

Ускорение точки А звена 1 определяем по формуле вращательного движения

где
 - нормальная составляющая ускорения,
- нормальная составляющая ускорения,

где
 - тангенциальная составляющая,
- тангенциальная составляющая,

Определим
масштаб плана ускорений:

Ускорение точки В звена 2 определяется совместным решением векторного уравнения сложного движения точки В относительно точки А:

Часть ускорений найдем аналитически:


Остальные
ускорения определим согласно построенному
плану ускорений:
По величине тангенциальной составляющей находим угловое ускорение звеньев 2 и 3:
Ускорение точки F звена 4 определяется из решения векторного уравнения сложного движения точки F относительно точки D:

Найдем аналитические зависимости:

Из
плана ускорений: