

2. Определение закона движения механизмов кислородного двухцилиндрового компрессора
2.1. Определение размеров звеньев основного механизма
Исходные данные для определения размеров звеньев основного механизма приведены в таблице 2.1
Таблица 2.1
|
Максимальный ход поршней |
|
м |
0,075 |
|
Размер по стойке |
h2 |
м |
0,120 |
|
Коэффициент изменения средней скорости поршня |
|
- |
1 |
|
Максимальный угол давления для звеньев 4 и 5 |
|
град |
6 |
|
Конструктивный угол |
θ |
град |
165 |
|
Угол качения коромысла |
β |
град |
38 |



Требуется определить длины звеньев lOA , lAB, lBC = lCD, lDF, h3 и h1.
Определяем положение точки С, принимая одно положение CD, части углового рычага 3, вертикально, а второе положение - отклоненный на максимальный угол, равный β/2 =19, считая его отклонение по горизонтали равное половине хода поршня HF/2=0,0375 м. Таким образом мы определили положение неподвижного шарнира С.
Положение точки B находим поворотом звена CD на конструктивный угол θ=165, так как длины звеньев CD и BC одинаковы, lBC= lCD.
Положение стойки O определяем с помощью двух крайних положений звена 3. Точка пересечения линии, соединяющей два крайних положения точки B, и оси, отстоящей на расстоянии h2 по горизонтали от точки С.
Положение точки
F определяем с помощью
максимального угла давления
 при условии, что он максимален в положении,
когда звено CD занимает
вертикальное положение.
при условии, что он максимален в положении,
когда звено CD занимает
вертикальное положение.
Длины звеньев lOA , lAB, lBC= lCD, lDF, h3 и h1 определим с помощью построения в соответствующем масштабе.
lOA=0.038м
lAB=0.153м
lBC= lCD=0.115м
lDF=0.03м
Расчет производится с целью определить основные размеры кулисного механизма. Используется метод моделирования системы одномассовой моделью. Механизм представляет собой сложную систему звеньев, нагруженных различными силами. Чтобы упростить определение закона движения такой сложной системы, применяется метод приведения сил и масс, который позволяет заменить реальный механизм некоторой эквивалентной схемой - одномассовой динамической моделью механизма.
Звено, называемое звеном приведения, движется так, что его координата совпадает в любой момент времени с координатой начального звена механизма. К звену модели приложен приведённый момент сил, а момент инерции IM этого звена относительно оси вращения является суммарным приведённым моментом инерции механизма =IM .В качестве звена приведения принимается кривошип ОА.
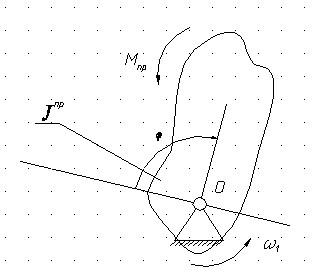
Рис. 2.1. Динамическая модель механизма.
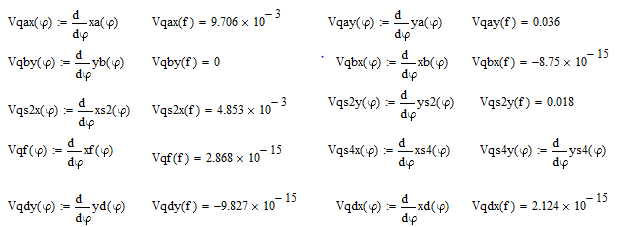
2.2. Определение значений передаточных функций и передаточных отношений основного механизма
Расчет проводим с помощью программы MathCad (см. Приложение 1).
Расчет передаточных функций:
Расчет передаточных отношений:
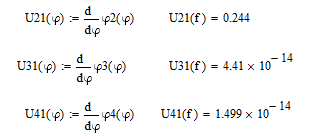
В таблице 2.2 приводятся результаты расчетов
Таблица 2.2
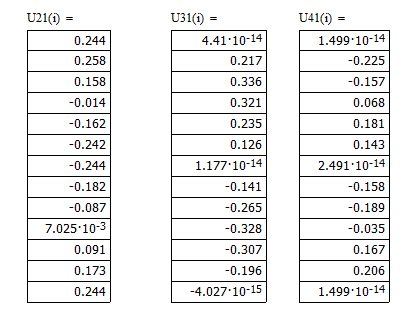
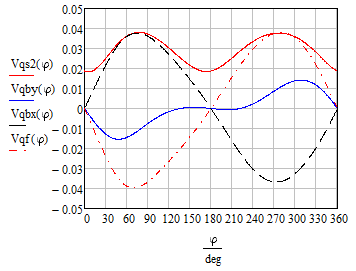
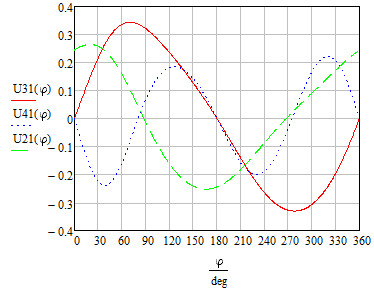
По этим данным строим графики передаточных функций и передаточных отношений.
2.3. Построение индикаторной диаграммы p и графиков сил f, действующих на поршни
Построим с помощью программы MathCad (см. Приложение 1) график давления в зависимости от угла поворота начального звена. Для этого строим индикаторные диаграммы и находим относительные перемещения левого и правого поршней (код программы см.в приложении)


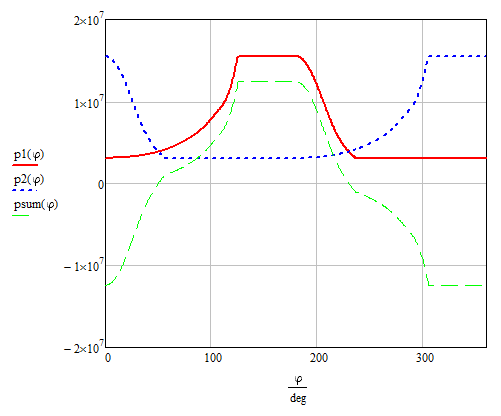
Для определения сил давления на поршни, необходимо давления в соответствующих цилиндрах умножить на площади соответствующих поршней.

 ;
;
 .
.