

Міністерство освіти і науки,молоді та спорту України
Національний університет «Львівська політехніка»
Кафедра деталі машин
Пояснювальна записка
До курсової роботи
На тему: «Проектування привідного пристрою»
З дисципліни: «Основи конструювання та проектування»
Виконав:
Студент групи ТЕ-21
Колодійчук А.І.
Керівник:
Павлище В.Т.
Львів-2011
Завдання для виконання курсової роботи
Розрахувати і спроектувати привідний пристрій для стрічкового конвеєра за наведеними вихідними даними:
1. Схема привідного пристрою:
1
— електродвигун; 2—редуктор; 3 —
клинопасова
передача; 4— рама; 5—конвеєр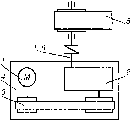
Обертовий момент на тихохідному валу редуктора Т=900, Н∙м.
Частота обертання тихохідного вала n =40 об/хв.
Тип редуктора: Ц2С.
Режим роботи пристрою — неперервний протягом 8 год на добу з короткочасними перевантаженнями до 150 %.
3.Обсяг роботи
Пояснювальне записка (15) с.
Креслення загального вигляду привідного пристрою (ф. А1). Креслення рами і шківів. Специфікації до складальних креслень
Керівник проекту: Павлище В.Т.
1. Призначення приводу і його характеристика
Будь-яка сучасна машина має робочі органи і привід. Конструкція і вигляд робочих органів визначаються цільовим призначенням машини. Структурна схема приводу машини включає двигун того чи іншого типу і механічну передачу. Остання використовується для передавання енергії від двигуна до робочого органа.
У технічному завданні на проектування задається привід до стрічкового конвеєра, який включає електродвигун, пасову передачу і стандартний редуктор. Усі окремі елементи приводу встановлюються на відповідній рамі. Механічна енергія від електродвигуна через клинопасову передачу передається до редуктора, тихохідний вал якого з'єднується за допомогою муфти з валом барабана стрічкового транспортера.
Вихідними даними для розрахунків є необхідний обертовий момент на тихохідному валу редуктора (який дорівнює моменту сил опору на валу барабана конвеєра) і частота його обертання (залежить від швидкості стрічки транспортера, тобто його продуктивності і діаметра барабана). Забезпечення заданої частоти обертання здійснюється за допомогою механічних передач — клинопасової передачі і стандартного редуктора, оскільки частота обертання вала електродвигуна значно вища від необхідної частоти обертання барабана конвеєра. Наявність пасової передачі в структурі привідного пристрою полегшує пуск у дію транспортера, а також запобігає руйнуванню елементів приводу за короткочасних пікових перевантажень.
2. Кінематичний розрахунок і вибір основних елементів привода
Для вибору основних елементів привідного пристрою необхідно встановити кінематичні параметри і параметри навантаження цих елементів.
2.1. Вибір електродвигуна для приводу
Найбільше в приводах машин застосовують асинхронні двигуни трифазного струму єдиної серії 4А. Ці електродвигуни задовільно працюють при тривалому режимі роботи, економічні й можуть використовуватись у різних кліматичних умовах. Асинхронні електродвигуни мають фіксовані частоти обертання валів залежно від кількості полюсів. Синхронні частоти обертання стандартних асинхронних електродвигунів, які працюють від електромережі частотою 50 Гц, бувають: 3000, 1500, 1000 й 750 об/хв. За тієї самої потужності із зменшенням частоти обертання вала електродвигуна зростають його габаритні розміри і маса, значно збільшується вартість. Тому доцільно використовувати двигуни з високою частотою обертання вала. Фактична частота обертання вала за номінального навантаження двигуна дещо менша і наводиться в довідниках.
Враховуючи те, що в заданому приводі використовується стандартний редуктор, для якого рекомендують електродвигуни з частотою обертання, не більшою за 1500 об/хв, а також необхідність достатньої довговічності привідного паса в клинопасовій передачі, орієнтуватимемось на вибір асинхронного електродвигуна, який має синхронну частоту обертання вала 1500 об/хв. Такі двигуни мають відносно малі вартість і масу, коефіцієнт корисної дії достатньо високий.
Необхідні параметри для вибору електродвигуна визначаються за наведеними нижче залежностями.
Потужність на тихохідному валу редуктора заданого привідного пристрою
Рт=Т ωт = Тπn/30=900*3.14*40/30=3800 Вт=3.8кВт
Необхідна потужність електродвигуна
Р1=Рт/η=3,8/0,92=4,09 кВт
де η=ηр∙ηп=0,92 коефіцієнт корисної дії (ККД) приводу;
ηр ~ 0,97 % — орієнтовне значення ККД стандартного редуктора;
ηп ~0,95% — орієнтовне значення ККД клинопасової передачі.
Фактична потужність електродвигуна повинна бути більшою або дорівнювати необхідній, тобто Рв>Р1
З довідника вибираємо стандартний електродвигун з параметрами:
тип електродвигуна 4А100L4УЗ
номінальна потужність РД =4,0 кВт;
частота обертання вала nд =1430 об/хв;
коефіцієнт корисної дії ηд=0,84
маса m =42 кг.