

Дифференциальная трансформаторная схема прибора(ксд – Компенсационная Схема Диференциальная).
В основу положена работа плунжерных датчиков.
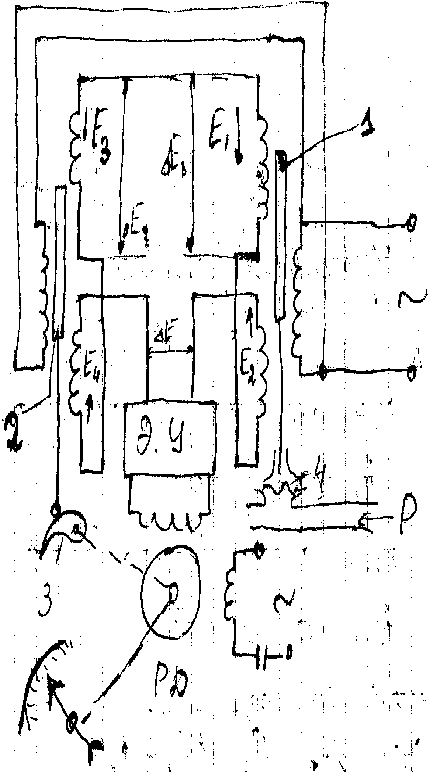
1 – плунжерный датчик; РД – реверсивный двигатель; 2 – плунжерный приемник; 3 – кулачок; 4 – мембрана.
Когда плунжер в среднем положении
L1=L2 => E1=E2 ∆E1=E1-E2=0
L3=L4 => E3=E4 ∆E2=E3-E4=0
При смещении плунжера 1
L1≠L2 => E1≠E2 ∆E≠0
∆E усиливается и подается в обмотку двигателя, вал двигателя поворачивается, поворачивается кулачок 3 вызывая смещение плунжера 2 до тех пор, пока ∆E2=∆E1 и ∆E=0.
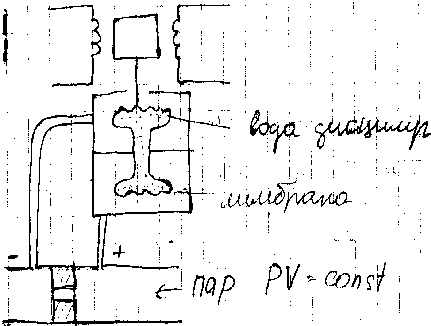
Пример (дифференциальный манометр)
Магнитоупругие датчики (разновидность индуктивных).
Состоит из электромагнитопровода в в ферромагнитном материале, с катушкой W витков.
Работа основана на свойстве ферромагнитного материала менять магнитную проницаемость сердечника под действием механической нагрузки.
![]()
![]()
F
увел,
![]() умен,
Lумен,
Zумен,
I
увел
умен,
Lумен,
Zумен,
I
увел
l
– длина средней линии магнитопровода.
![]() -магнитная
проницаемость.
-магнитная
проницаемость.
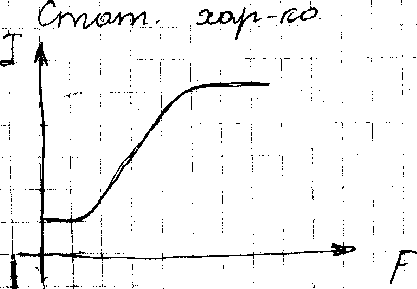
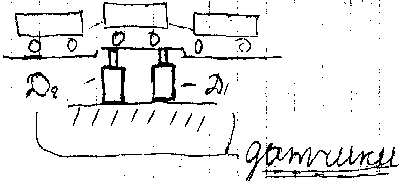
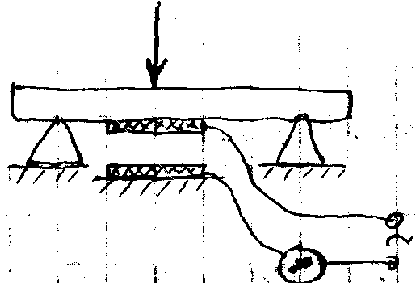
Достоинство: высокая мощность выходных сигналов, может работать при f=50Гц, возможность работы в запыленных и агрессивных средах, большие измеряемые усилия 10…100т.
Недостатки: нелинейная статическая характеристика, не проходит через 0, не реверсивна, на работу влияет Uс, fc, tокр.
Применяют для измерения веса вагонов, автомобилей, в промышленных установках.
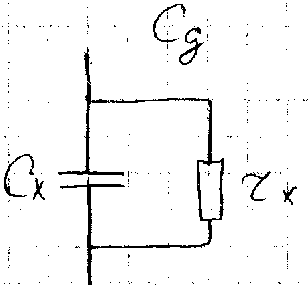
Емкостные датчики .
Измеряемая величина преобразуется в изменение емкости конденсатора.
![]()
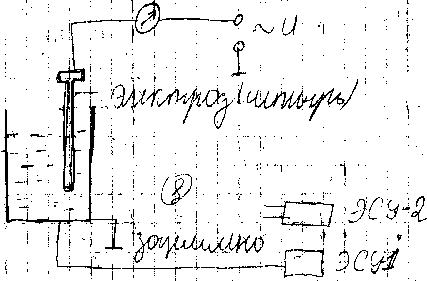
ε воды = 80; ε воздуха = 1
ЭИУ (Электрический Индикатор Уровня)
ЭСУ (Электрический Сигнализатор Уровня)
Измерение влажности.
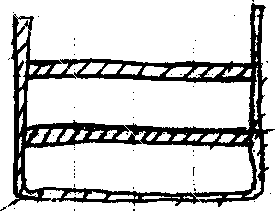 Пластины,
стакан из изоматериала
Пластины,
стакан из изоматериала
 rх
– диэлектрические потери
rх
– диэлектрические потери
![]()
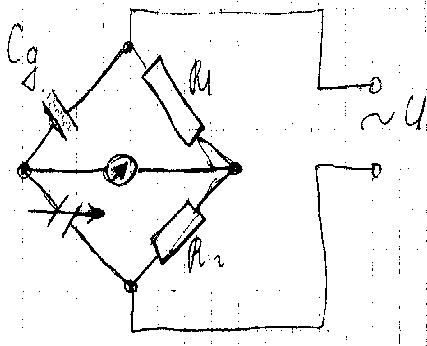
Недостатки: результат измерения зависит диэлектрических потерь rх , определяемых плотностью, температурой, влажностью.
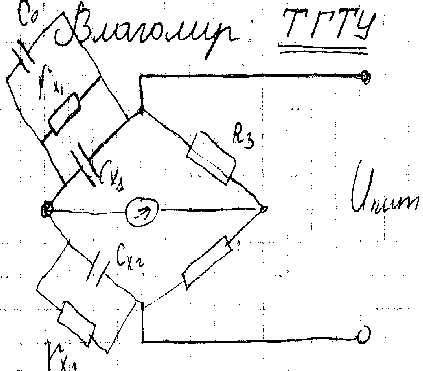

Сx1=Cx2, rх1= rх2 , C0 – конденсатор постоянной емкости
![]()
![]()
![]()
![]()
Достоинство: высокая чувствительность, малая индуктивность, простота конструкции и надежность в работе.
Недостатки: работа зависит от температуры, влажности, необходимо иметь источник высокой частоты, т.к. при f=50Гц сопротивление очень велико.
С=10Ф, f=50Гц, Хс=?
![]()
Магнитно-анизотропные датчики (пресдуктор).
Разновидность магнитных упругих датчиков. Состоит из сплошного материала, у которого просверлены 4 отверстия.
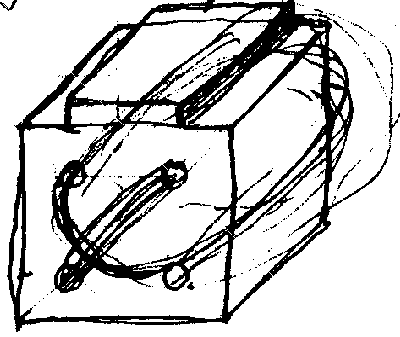


Когда F=0 магнитные свойства сердечника в направлении АА и ВВ одинаковы и тогда магнит силовыми линиями при подаче Uвх замыкаются по симметричным кольцевым линиям.
Uвых = 0
При F≠0 F-увел, μ-умен, L-умен, I-увел. Uвых≠0
Генераторный датчик.
В них измеряемая величина преобразуется в изменение напряжения. К ним относят термопары, тахогенераторы, вращающие трансформаторы.
Термопары.
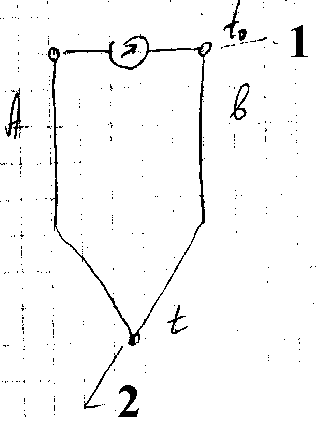
1 – холодный спай; 2 – горячий спай.
ЕДС EAB=F(t-t0)
t холодного спая = const Для каждой термопары имеется (табличное) значение.
ET=F(t) при t0 = 0C – статические
Пусть t = 100С t0 =0С ET=?
Eизмерения = (t1-t2) t0`-t0=0С
Ет-Еиз=Епопр(t0`-t0) Еизм±Епопр=Етабл t
Автоматическое введение поправки с помощью компенсирующих мостов.
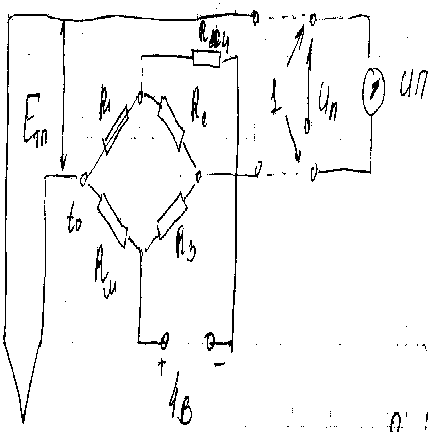
R1…Ru – манганиновый при t0 =0…50 С R=const
Uп = Eтп+Uab
Пусть ТПХА t = 100C, t0=20C
При 20С мост уравновешивают Uab = 0
R1R3=RмR2 Uтп = 3,3 мВ Uп = 3.3мВ
Пусть t = 100C t0=30C
Етп=29мВ, Uab=0,4мВ
Uп=Uтп+Uab=29+0,4=3,3мВ
Сопротивление R4 позволяет обеспечить заданный разбаланс.