

Цифровые измерительные электронные приборы.
![]()
Хвх – входная аналоговая величина; ВАП – входной аналоговый преобразователь; АЦП – аналогово-цифровой преобразователь; ЦОУ – цифровое отчетное устройство.
Применяют для измерения U,I,R,f,φ.
Преимущества: высокая точность, широкий рабочий диапазон, высокое быстродействие получения результатов измерения в удобной для обработки форме, возможность ввода измеренной информации в ЭВМ.
Недостатки: сложность, высокая стоимость. Меньшая, чем у аналоговых, надежность.
Измерение параметров элементов электрических цепей.
К параметрам электрических цепей относят R, L, C, Z (полное сопротивление)
Методы измерения.
1. Метод вольтметра, амперметра.
2. Непосредственная оценка (рассмотрено ранее – амперметр, логометр).
3. Мостовой.
4. Резонансный.
5. Измерение I и U в цепи измерения и последующий расчет ее параметров по закону Ома, используется для измерения активного сопротивления, индуктивности и емкости.
1. Активных сопротивлений.

а)
![]() при Ra<<Rx
при Ra<<Rx
![]() ∆Rx
– min
∆Rx
– min
измеряет большое сопротивление
б) Ia=Iv+Ix
![]() при
Rv>>Rx
при
Rv>>Rx
Измеряет малые сопротивления
2. Полных сопротивлений (модуль полных сопротивлений) схемы аналогичны (вместо Rx – Zx)
а) большие сопротивления:
при |Zx|>Ra ∆Zxmin
б) при Rv>>|Zx|∆Z-min
3. Измерении емкости
а)

Измерение малой емкости
б)

позволяет измерять конденсатор большой емкости
![]()
![]() нужно
знать значение частоты.
нужно
знать значение частоты.
Для измерения малых значений емкостей применяют метод двух вольтметров.
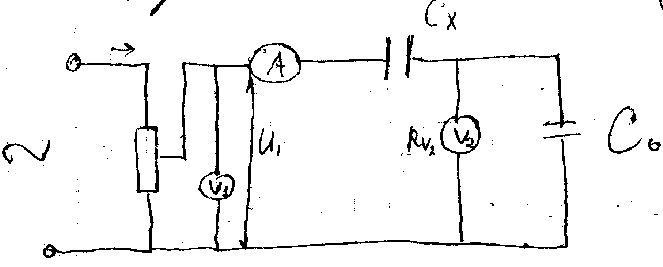
при C0>>Cx I=U1ωCx= U2ωC0 =>
![]()
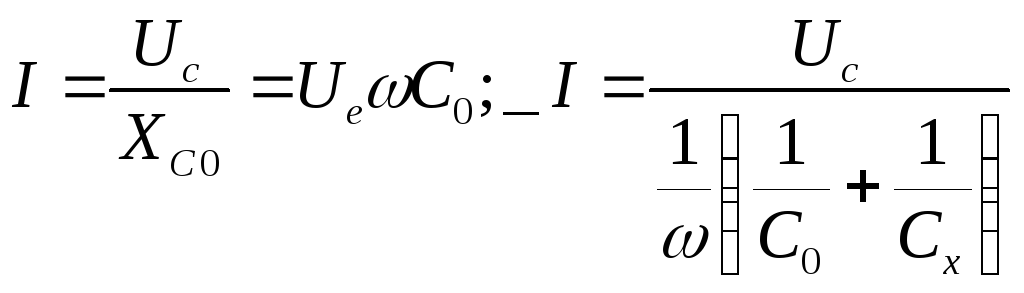
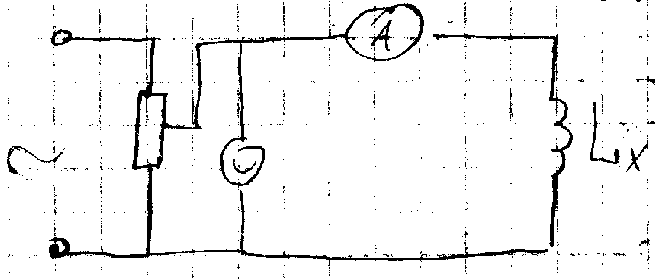
4. Измерение индуктивности катушек.
а)
Измерение больших значений индуктивности.
б)
Измерение малых значений индуктивности.
Измерительные мосты постоянного тока.
Обладают большей точностью, высокой чувствительностью, широким диапазоном измеряемых значений.
Бывают уравновешанными и неуравновешанными.
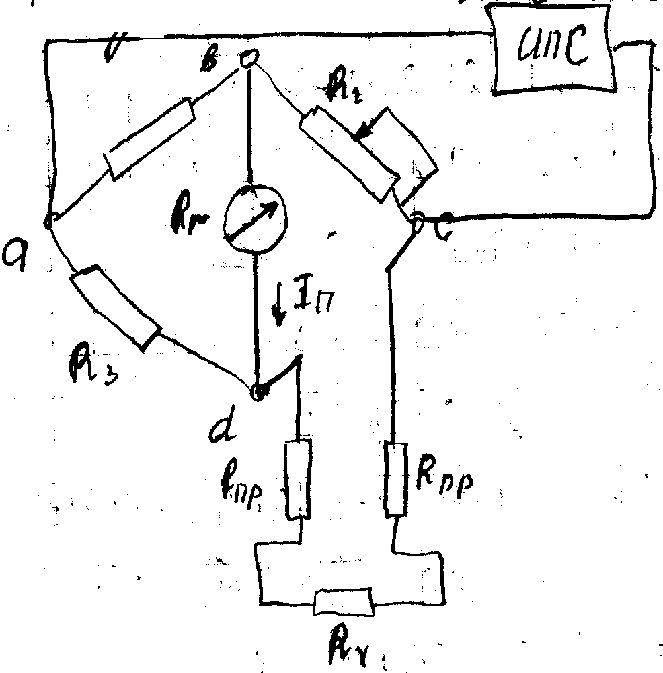
Уравновешенный мост.

abcd – мосты; ИП – источник питания; ac – диагональное питание; bd – измерительная диагональ; НП – нуль прибор (гальванометр); R1, R2, R3 – плечо моста; R2, R3 – противоположные плечи; Rпр – сопротивление проводов; R1, R2 – емкостные плечи моста.
Отсчет производится в момент, когда Iп=0 => диагональ Ubd = 0, тогда, когда Uab=Uad и Ubc=Ucd, I1R1=I3R3, I2R2=Ix(Rx-2Rпр) по закону Кирхгофа в момент равновесия Iпр = 0, I1=I2 , I3=I2
![]()
Равновесие
моста:
![]()
(произведение сопротивлений противоположных плеч должно быть одинаковым)
![]()
![]()
Достоинства: результат измерений не зависит от напряжения питающего моста, высокая чувствительность.
Недостаток: Схема не позволяет производить непосредственные расчеты.
Rx min >8 Oм (из-за сопротивления проводов)
Rx max <106…108Ом (из-за того что минимальные токи в плечах моста не могут быть зафиксированы нуль прибором)
Неуравновешенный мост.
Перед измерением какой то внешней Rx с помощью сопротивления R2 мост уравновешивают, потом при изменении Rx по шкале судят о Rx.
![]()
М = F(R1, R2, R3, Rx, Rг)
М= [Rг(R1+ R2) (R3+ Rх)+ R1 R2 (R3+ Rх)+ R3 Rх (Rг+ Rх)]
при Rx 15…25% М=const
Достоинства: схема позволяет производить непосредственный опыт.
Недостаток: работа зависит от изменения Uac и Rг
Мосты переменного тока.

Zi=Ri+jXi = Zi ejφi
в равновесии когда
![]()
![]()
![]()
![]()
![]()
Мост
переменного тока будет в равновесии,
когда
![]() (противоположных
плеч) и одинакова сумма сдвига фаз
противоположных плечей.
(противоположных
плеч) и одинакова сумма сдвига фаз
противоположных плечей.
при Z1= R1 и Z2= R2 Z3= XL (XC), Z4= XL (XC),
В смежных плечах сопротивление должно быть одинакового характера.

![]()
![]()
Если есть индуктивность и емкость, их нужно включать в противоположные плечи моста.

![]()
Lx=R1R2Cобр
Мосты питаются напряжением с частотой 100(1000)Гц это связано с наводками, которые возникают в мостах, возникает дополнительная погрешность.