

Лабораторная работа №4 Исследование тепловой инерционности термопар и термометров сопротивления
Цель работы: 1) изучить проявления тепловой инерционности термопар и термометров сопротивления при различных способах их установки в исследуемый объект.
2) Приобрести навыки учета и снижения влияния тепловой инерционности контактных лабораторных термометров.
4.1. Краткие теоретические сведения
При измерении температуры с помощью контактных датчиков температуры (термопары, термометры сопротивления и др.) помимо случайных погрешностей могут возникать систематические погрешности. Их природа может быть разной. Различают стационарные и динамические источники систематических погрешностей. К стационарным относят те источники погрешностей, которые контактный датчик вносит в температурное поле изучаемого объекта, трансформируя его непосредственно своим присутствием (внедрением в объект). Динамические погрешности возникают только при измерении нестационарных (изменяющихся во времени) температур, так как контактный датчик обладает собственной тепловой инерционностью и не всегда способен успевать следить за быстро изменяющейся температурой объекта. При этом он, обладая заметной теплоемкостью, в условиях изменяющейся во времени температуры оказывается способным дополнительно трансформировать температуру объекта в зоне контакта с ним. Приемы снижения и учета стационарных и динамических погрешностей различны.
Для снижения стационарных систематических погрешностей важно выполнять ряд приемов. В частности, размеры чувствительного элемента датчика по возможности не должны нарушать пространственную конфигурацию температурного поля исследуемого объекта. В этом отношении термопары практически всегда предпочтительнее других контактных температурных датчиков, так как их чувствительным элементом является зона контакта термоэлектродов (спай термопары), размеры которой зависят от их диаметра и могут снижаться до долей миллиметра. Важно также, чтобы электроды термопар и термометров сопротивления выводились из зоны (точки) замера температуры в направлении ее минимального градиента, чтобы максимально снизить тепловые потоки вдоль электродов. Иначе они могут заметно искажать температуру объекта в измеряемой точке. Снижению стационарной погрешности помогает также хороший тепловой контакт чувствительного элемента датчика с исследуемым объектом. Более конкретные приемы снижения стационарных погрешностей контактных датчиков температуры можно найти в учебном пособии [1] и указанной в нем специальной литературе.
Динамическая погрешность контактных датчиков температуры всецело зависит от их тепловой инерционности, которая, в свою очередь, зависит от собственной теплоемкости чувствительного элемента датчика и от особенностей его теплового контакта с объектом. В исследовательской практике чувствительные элементы термопар, проволочных термометров сопротивления и полупроводниковых термисторов обычно армируются (покрываются) полимерной или керамической трубочкой и в таком виде вставляются в изотермическое отверстие объекта. Поэтому тепловой контакт датчика с объектом определяется тепловым сопротивлением армирующей трубочки.
Для грубой аналитической оценки
проявления тепловой инерционности
датчика, находящегося в отверстии
исследуемого объекта, рассмотрим
следующую упрощенную тепловую задачу.
Пусть объект разогревается по линейному
закону, сохраняя изотермическое
температурное поле, а сам датчик
разогревается только тем тепловым
потоком, который поступает к нему от
объекта через армирующую трубочку. Из
физических соображений и теории
теплопроводности следует, что в этих
условиях датчик в установившемся режиме
опыта будет разогреваться со скоростью
объекта. Примем, что датчик в первом
приближении остается изотермическим,
имеет на активном участке длиной l
теплоемкость С и радиус R,
а
стенка армирующей трубочки обладает
удельным тепловым сопротивлением
![]() ,
где – толщина
стенки, а –
коэффициент теплопроводности трубочки.
Уравнение теплового баланса рассматриваемой
системы "объект – армирующая трубочка–
датчик" приобретает простой вид
,
где – толщина
стенки, а –
коэффициент теплопроводности трубочки.
Уравнение теплового баланса рассматриваемой
системы "объект – армирующая трубочка–
датчик" приобретает простой вид
![]() ,
(4.1.1)
,
(4.1.1)
где Q – тепловой
поток, проникающий через стенку трубочки
и поглощаемый датчиком;
![]() –
перепад температуры между объектом и
датчиком (внутри стенки трубочки), b
– скорость разогрева объекта.
–
перепад температуры между объектом и
датчиком (внутри стенки трубочки), b
– скорость разогрева объекта.
Из уравнения (4.1.1) следует, что динамическая погрешность показаний контактного термодатчика будет совпадать с величиной перепада температуры в армирующей трубочке
![]() .
(4.1.2)
.
(4.1.2)
Полученная
упрощенная формула позволяет сделать
ряд общих выводов. Из нее следует, в
частности, что динамическая погрешность
контактного температурного датчика во
всех случаях будет пропорциональна его
теплоемкости, удельному тепловому
сопротивлению
![]() между объектом и датчиком, а также
скорости разогрева (охлаждения) объекта.
между объектом и датчиком, а также
скорости разогрева (охлаждения) объекта.
Общую оценку тепловой инерционности контактных термодатчиков обычно производят экспериментально, нагревая или охлаждая их в воде (активная по тепловому воздействию среда) или спокойной воздушной среде (слабая по тепловому воздействию среда). Процессы нагрева и охлаждения при этом происходят по экспоненциальному закону, поэтому инерционность датчика оценивают по величине показателя экспоненты. Для грубой аналитической оценки показателя тепловой инерционности достаточно рассмотреть задачу охлаждения (нагрева) датчика в изотермической конвективной среде постоянной температуры. Уравнение теплового баланса датчика и среды в этом случае имеет вид
![]() ,
(4.1.3)
,
(4.1.3)
где
![]() – температурный перепад между датчиком
и средой, –
коэффициент теплоотдачи между датчиком
и средой, а все другие обозначения можно
найти в уравнении(4.1.1).
– температурный перепад между датчиком
и средой, –
коэффициент теплоотдачи между датчиком
и средой, а все другие обозначения можно
найти в уравнении(4.1.1).
Из уравнения (4.1.3) следует, что перегрев
![]() датчика в рассматриваемом случае должен
изменяться во времени по экспоненциальному
закону вида
датчика в рассматриваемом случае должен
изменяться во времени по экспоненциальному
закону вида
![]() ,
(4.1.4)
,
(4.1.4)
где
![]() –
показатель экспоненты, определяющий
тепловую инерционность датчика в
рассматриваемой конвективной среде,
–
показатель экспоненты, определяющий
тепловую инерционность датчика в
рассматриваемой конвективной среде,
![]() .
(4.1.5)
.
(4.1.5)
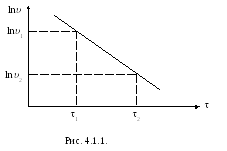
При экспериментальном определении
показателя инерционности температурного
датчика для его расчета используется
найденная в опыте зависимость
![]() .
С этой целью обычно строится
полулогарифмический график ln
.
С этой целью обычно строится
полулогарифмический график ln
![]() – ,
как показано на рис. 4.1.1. Такая кривая
является прямой линией. Тангенс угла
ее наклона
– ,
как показано на рис. 4.1.1. Такая кривая
является прямой линией. Тангенс угла
ее наклона
![]() (4.1.6)
(4.1.6)
характеризует темп охлаждения (нагрева)
датчика, а котангенс угла наклона –
показатель инерционности
![]() .
Имеем
.
Имеем
![]()
![]() .
(4.1.7)
.
(4.1.7)
Показатель тепловой инерционности термодатчика, вмонтированного в изотермическое отверстие исследуемого объекта, можно оценивать аналогичным образом. Чтобы найти его, рассмотрим уравнение теплового баланса между датчиком и объектом, температура которого растет во времени по произвольному закону. Как и прежде, примем, что датчик сохраняет изотермичность и разогревается только тем тепловым потоком, который поступает к нему от объекта через тепловое сопротивление армирующей трубочки. Сохраняя обозначения, которые использовались в уравнении (4.1.1), имеем
![]() ,
(4.1.8)
,
(4.1.8)
где tc() – текущая температура объекта; t() – текущая температура датчика.
Показателем тепловой инерции датчика в этом случае определяется соотношением
![]() .
(4.1.9)
.
(4.1.9)
Сравнивая соотношения (4.1.9) и (4.1.5),
убеждаемся, что они во многом сходны,
так как в случае отверстия комплекс
![]() играет ту же роль, что и коэффициент
теплоотдачи . В
теплообменных процессах комплекс
играет ту же роль, что и коэффициент
теплоотдачи . В
теплообменных процессах комплекс
![]() принято называть тепловой проводимостью
тонкой теплоизоляционной стенки.
принято называть тепловой проводимостью
тонкой теплоизоляционной стенки.
Важно подчеркнуть, что сведения об инерционных характеристиках температурных датчиков представляют при тепловых исследованиях практический интерес. Действительно, если известен показатель инерционности конкретного термодатчика, то исследователь всегда может оценить величину систематической динамической погрешности, какую можно ожидать при измерении нестационарных температур. Так, из уравнения (4.1.9) следует, что температура tд() датчика может отставать от измеряемой температуры t0() объекта в нестационарных условиях приближенно на величину
![]() , (4.1.10)
, (4.1.10)
где b() – скорость изменения температуры датчика. В условиях разогрева объекта показания датчика всегда будут оставаться несколько ниже его температуры, а в условиях охлаждения – превышать его температуру.
Оптимальными всегда следует считать такие условия опыта, при которых динамической погрешностью датчика можно пренебрегать.
Изложенные общие соображения достаточны для осознанного выполнения данной лабораторной работы.