

Глава 4. Принципы автоматического регулирования. Замкнутые и разомкнутые сар
4.1.Принципы регулирования
4.1.1.Общие замечания
Регулятор в САР можно рассматривать как информационное устройство, обрабатывающее информацию о значениях регулируемой величины, задающего и возмущающих воздействий и формирующее регулирующее воздействие в функции указанных величин
|
|
(4.1) |

где x – текущее значение регулируемой величины; z – значение задающего воздействия; q – значение возмущающего воздействия.
Обычно в (4.1) информация о регулируемой величине представляется через её отклонение от предписанного значения, определяемого значением задающего воздействия
|
|
(4.2) |

где ∆x -- отклонение регулируемой величины от предписанного значения.
По виду функции (4.2), называемой алгоритмом регулирования, различают следующие принципы автоматического регулирования:
- по отклонению;
- по возмущению
- комбинированный.
4.1.2. Регулирование по возмущению
При регулировании по возмущению регулирующее воздействие является функцией возмущающего воздействия
|
|
(4.3) |

Принцип регулирования по возмущению показан на рисунке 4.1 Как видно из рис.4.1, цепь возмущающего действия разветвляется. Одна ветвь действует на объект регулирования непосредственно, другая - через регулятор. Воздействия по каждой из ветвей противоположны по знаку.
|
|
|
Рис. 4.1. Принципиальная схема регулирования по возмущению |

Особенностью регулирования по возмущению является отсутствие главной обратной связи, т.е. такая САР является разомкнутой.
Из рис.4.1 видно, что регулятор начинает действовать сразу после появления возмущения, не ожидая изменения регулируемой величины. Поэтому при регулировании по возмущению принципиально может быть достигнуто высокое быстродействие.
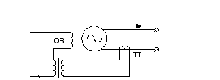
Примером регулирования по возмущению является компаундирование синхронных генераторов (рис. 4.2).
|
|
|
Рис. 4.2. Электрическая схема компаундировакния генератора (Г – генератор; ТТ– трансформатор тока; ОВ – обмотка возбуждения генератора) |
4.1.3. Регулирование по отклонению
При регулировании по отклонению регулирующее воздействие является функцией отклонения регулируемой величины от предписанного значения
|
|
(4.4)
|

Принцип регулирования по отклонению показан на рис.4.3.
|
|
|
Рис. 4.3. Принципиальная схема регулирования по отклонению |

Особенностью такого регулирования является- наличие в САР главной отрицательной обратной связи, по которой на регулятор поступает информация о текущем значении регулируемой величины (замкнутая САР);
При регулировании по отклонению принципиально проще достигается малое значение ошибки регулирования, чем при регулировании по возмущению. Однако регулятор по отклонению не сразу начинает действовать после появления возмущения, а только после того, как начнет изменяться регулируемая величина. Поэтому процесс регулирования осуществляется с некоторым запаздыванием, обусловленным инерционностью самого объекта регулирования.
Примерами регулирования по отклонению являются САР, представленные на рис. 1.2, 1.4 и 1.5
4.1.4. Комбинированный принцип регулирования
При комбинированном регулировании используются оба принципа регулирования – по отклонению и по возмущению. При этом удачно сочетаются достоинства обоих рассмотренных выше принципов. Регулированием по возмущению обеспечивается быстрое (но с относительно большой ошибкой) регулирование, а регулированием по отклонению – малая ошибка при любом виде возмущения (но с возможным запаздыванием)
Принцип комбинированного регулирования показан на рис.4.4.
|
|
|
Рис. 4.4. Принципиальная схема комбинированного регулирования |

Примером комбинированного регулирования в электроэнергетике является компаудирование синхронных генераторов с коррекцией по напряжению. Использование двух регуляторов позволяет упростить выполнение каждого из них и в некоторой степени повысить надёжность функционирования САР, т.к. при отказе одного регулятора не происходит полного отказа системы.
4.1.5. Передаточные функции и коэффициенты передачи
разомкнутой и замкнутой САР
Как следует из раздела 4.1.4., функционирование многих САР связано с необходимостью сравнения значения регулируемой величины на выходе с задающим воздействием на входе. Информация с выхода САР поступает на вход по так называемой главной обратной связи. При этом следует иметь ввиду, что физически увеличение x должно приводить к уменьшению z.Поэтому главная обратная связь всегда отрицательная (рис. 4.3, 4.4). САР, имеющая главную обратную связь, называется замкнутой.
В некоторых САР главная обратная связь может отсутствовать. Такая САР называется разомкнутой (рис.4.1).
Рассмотрим замкнутую САР, представленную на рис. 4.3. На ее входе имеем задающее воздействие z, а на выходе – регулируемую величину x. Для такой системы с отрицательной обратной связью можно написать:
|
|
(4.5) |

Для
такой замкнутой системы, зная ее
передаточную функцию

 в
разомкнутом состоянии, можно написать:
в
разомкнутом состоянии, можно написать:
|
|
(4.6) |

Или
|
|
(4.7) |

Обозначим
|
|
(4.8) |

Выражение (4.8) называют передаточной функцией замкнутой системы.
Тогда:
|
|
(4.9) |

Выражение (4.9) устанавливает связь между передаточными функциями для замкнутого и разомкнутого состояний системы.
Из
соотношения (4.9), положив p=0 ,
можно видеть, что коэффициент передачи
на нулевой частоте для замкнутой системы
,
можно видеть, что коэффициент передачи
на нулевой частоте для замкнутой системы

 – связан с аналогичным коэффициентом
передачи разомкнутой системы
– связан с аналогичным коэффициентом
передачи разомкнутой системы
 соотношением
соотношением
|
|
(4.10) |

