

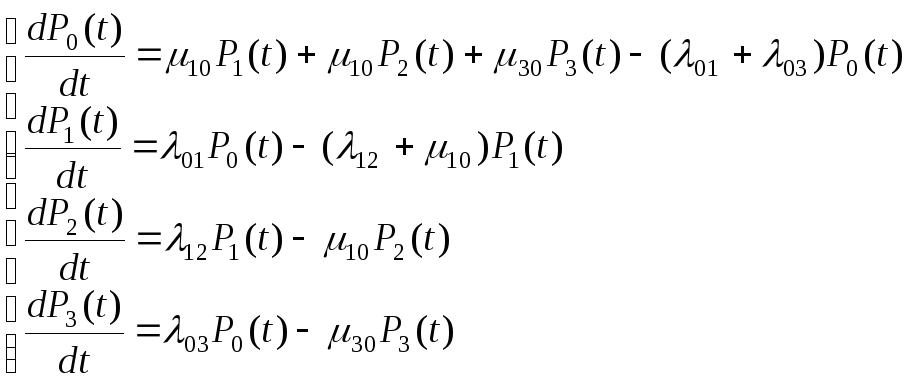
Динамічному режимі роботи
Запишемо отриману
в Л.8 лінійну систему диференціальних
рівнянь відносно функцій
![]() :
:
 (8.1)
(8.1)
Для розв’язання системи необхідно задати початкові умови, при t=0:
![]() =1,
=1,
![]() =0,
=0,
![]() =0,
=0,
![]() =0.
(8.2)
=0.
(8.2)
Нормувальна умова :
![]() . (8.3)
. (8.3)
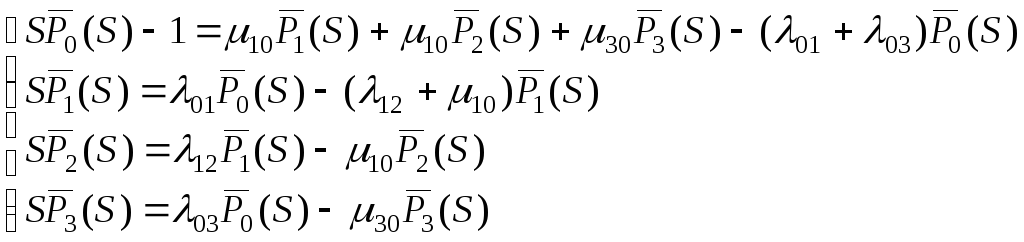
Розв’яжемо систему (8.1) операційним методом. Застосуємо до неї інтегральне перетворення Лапласа:
![]() , (8.4)
, (8.4)
тут:
S
– параметр перетворення Лапласа;
![]() -
зображення Лапласа функції
-
зображення Лапласа функції
![]() ,
це можна записати ще так:
,
це можна записати ще так:
![]() . (8.5)
. (8.5)
В
операційному численні доведено, що
похідній функції
![]() в просторі зображень відповідає:
в просторі зображень відповідає:
![]() (8.6)
(8.6)
Запишемо рівняння (8.1) в просторі зображень, враховуючи (8.5) і (8.6) :
 . (8.7)
. (8.7)
Ми
одержали систему лінійних алгебраїчних
рівнянь відносно зображень
![]() функцій
функцій
![]() .
.
Суть
операційного методу розв’язання
диференціальних рівнянь полягає в тому,
що при застосуванні інтегральних
перетворень (в даному випадку Лапласа)
в просторі зображень одержуємо систему
алгебраїчних рівнянь
відносно зображень шуканих функцій.
Розв’язавши цю систему і знайшовши
зображення невідомих функцій можна по
таблицях відновити оригінали цих
функцій, тобто знайти шукані функції
![]() .
.
Запишемо систему (8.7) звівши подібні члени:
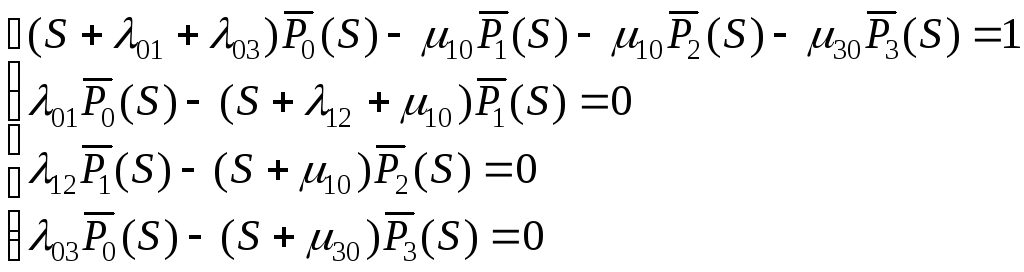 (8.8)
(8.8)
Розв’яжемо систему (8.8) методом Крамера, згідно якого:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
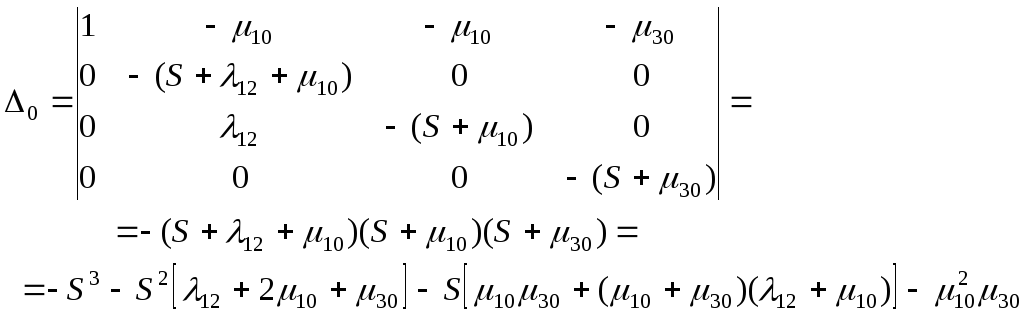
Запишемо основний визначник системи:
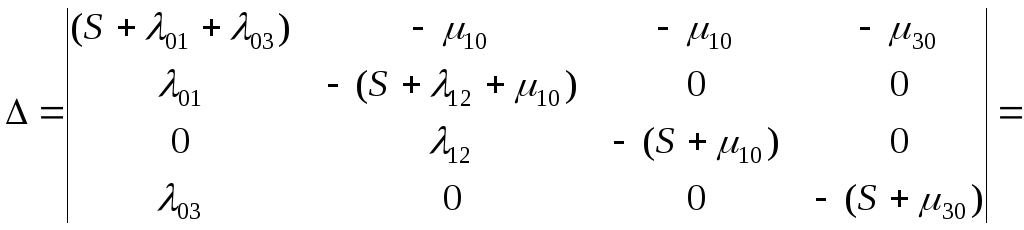
розкладемо його по елементах 4-го стовпця:

![]()
![]()
провівши прості математичні перетворення і звівши подібні члени отримаємо:
 де
де
 .
.
Таким чином, основний визначник запишеться у вигляді:
![]() , (8.9)
, (8.9)
де
а1..а4
– коефіцієнти при
![]() :
:

![]()
![]() ;
;
![]() .
.
Знайдемо допоміжні визначники системи:
Можна записати:
![]() , (8.10)
, (8.10)
відповідно:
![]() ;
;
![]() ;
;
![]() ;
;
![]() -1
-1
Знаходимо
![]() :
:
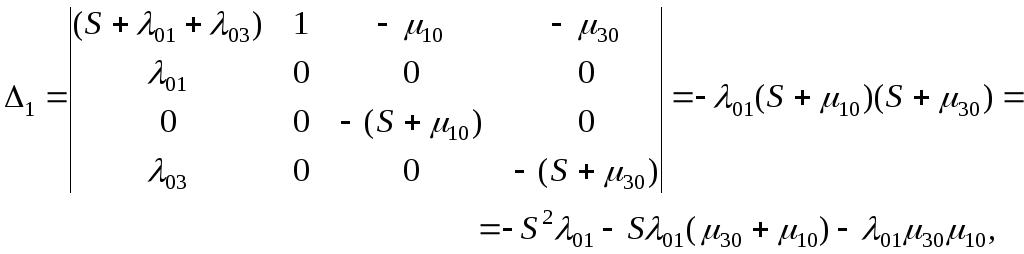 або
або
![]() , (8.11)
, (8.11)
де
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
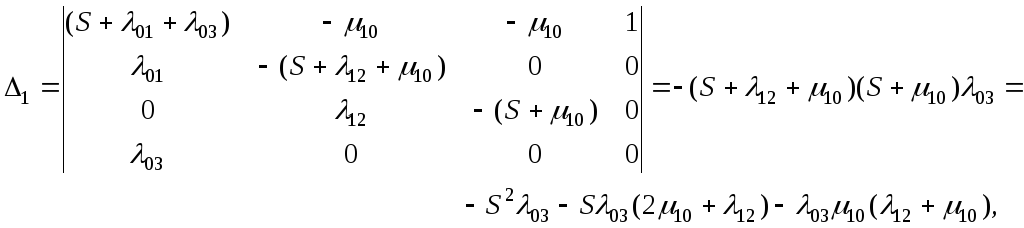
Знаходимо
![]() :
:
 ,
,
або
![]() , (8.12)
, (8.12)
де
![]() ,
,
![]() ,
,
![]() .
.
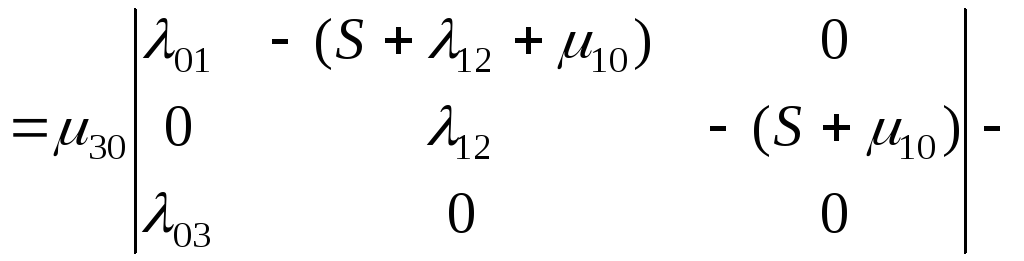
Знаходимо
![]() :
:
 або
або
![]() ,
,
де
![]() ;
;
![]() ;
;
![]() ;
;
![]() 0.
0.
Лекція 9. Ймовірність працездатності системи з 4-х станів
при динамічному режимі роботи
Таким чином, маючи основний і допоміжні визначники можемо записати зображення функцій. В загальному випадку :
 . (9.1)
. (9.1)
При
відомих
![]() і
і
![]() можна знайти числові значення коренів
знаменника (
можна знайти числові значення коренів
знаменника (![]() ,
,
![]() ,
,
![]() ).
У випадку коли всі корені (
).
У випадку коли всі корені (![]() ,
,
![]() ,
,
![]() )
знаменника
)
знаменника![]() дійсні, його можна розкласти на
найпростіші, і (9.1) запишеться так:
дійсні, його можна розкласти на
найпростіші, і (9.1) запишеться так:
![]() , (9.2)
, (9.2)
де A, B, C, D – невідомі коефіцієнти. Звівши до спільного знаменника і прирівнявши чисельники отримаємо:
![]() . (9.3)
. (9.3)
Згрупувавши подібні члени в лівій частині рівності (9.3) одержимо многочлен третього степеня:
![]() ,(9.4)
,(9.4)
оскільки
многочлени тотожньо рівні нулю тоді і
тільки тоді коли рівні коефіцієнти при
однакових степенях
![]() ,
то прирівнюючи коефіцієнти лівої і
правої частин, одержимо систему 4-х
лінійних алгебраїчних рівнянь відносно
,
то прирівнюючи коефіцієнти лівої і
правої частин, одержимо систему 4-х
лінійних алгебраїчних рівнянь відносно
![]() :
:
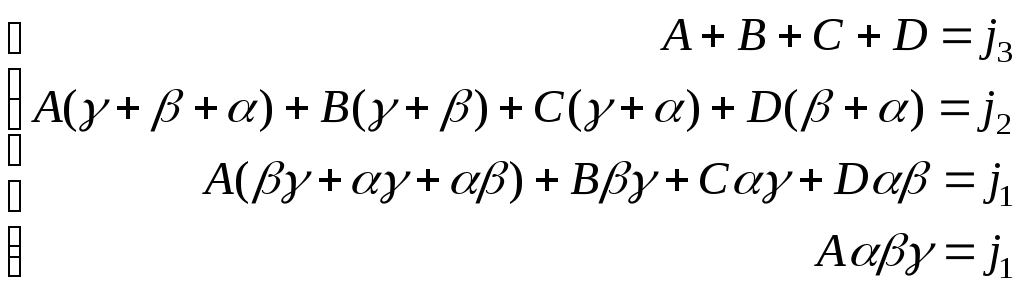 . (9.5)
. (9.5)
Розв’язавши
систему (9.5) одержимо
![]() .
Оскільки
.
Оскільки
![]() ,
,
![]() ,
то
,
то
![]() . (9.6)
. (9.6)
Таким чином ми перейшли
від зображень функцій до оригіналів і
отримали функціональні залежності
ймовірностей перебування системи в 4-х
станах при динамічному(в залежності
від часу
![]() )
режимі роботи.
)
режимі роботи.
Оскільки працездатними станами системи 4-х станів є S0 і S1, то ймовірність безвідмовної роботи системи з 4-х станів при динамічному режимі роботи рівна:
![]() .
.
У випадку, коли
знаменник![]() (9.1) має один дійсний корінь
(9.1) має один дійсний корінь
![]() ,
а інші два - спряжені комплексні, можна
записати:
,
а інші два - спряжені комплексні, можна
записати:
![]() , (9.7)
, (9.7)
квадратний тричлен
![]() в правій частині отримується шляхом
ділення лівої частини рівності
в правій частині отримується шляхом
ділення лівої частини рівності
![]() на
на
![]() .
Квадратний тричлен дійсних коренів
немає і на множники в дійсній області
не розкладається.
.
Квадратний тричлен дійсних коренів
немає і на множники в дійсній області
не розкладається.
Тоді:
 . (9.8)
. (9.8)
Звівши до спільного знаменника і прирівнявши чисельники отримаємо:
![]() . (9.9)
. (9.9)
Звівши подібні члени
в лівій частині рівності і прирівнявши
коефіцієнти при
![]() з однаковими Як і в попередньому випадку,
одержимо систему рівнянь відносно
невідомих
з однаковими Як і в попередньому випадку,
одержимо систему рівнянь відносно
невідомих
![]() :
:
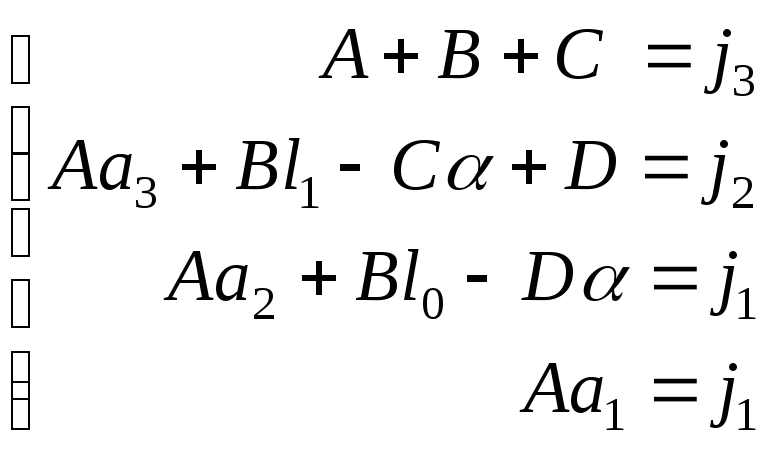 . (9.10)
. (9.10)
Таким чином ми
знаходимо
![]() .
При переході від зображень до оригіналів
функцій будемо використовувати такі
табличні перетворення:
.
При переході від зображень до оригіналів
функцій будемо використовувати такі
табличні перетворення:
![]() ;
;
![]() ;
;
![]() ;
;
![]() (9.11)
(9.11)
Для цього нам необхідно зробити наступні перетворення. Враховуючи в формулі (9.8) що:
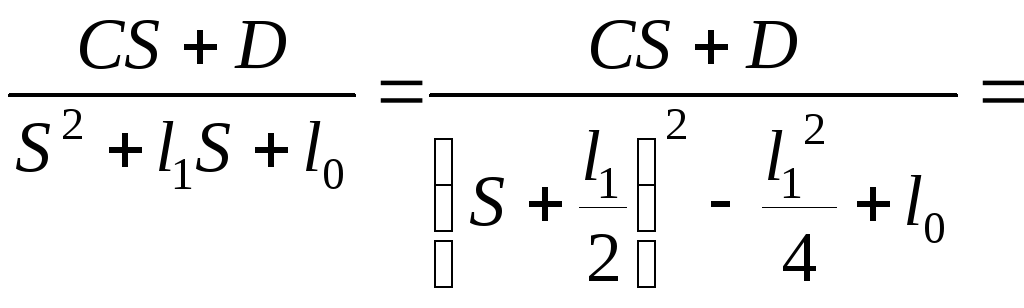 і поклавши
і поклавши
![]() ,
,
 ,
,
отримаємо:

 ;
;
Тут
![]() - будь яка з
- будь яка з
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Як і в попередньому випадку ймовірність безвідмовної роботи системи з 4-х станів при динамічному режимі роботи рівна:
![]() .
.
Л.8. Аналіз застосовності моделей ГАЛС
Сучасне виробництво характеризується неперервним ростом числа мілких партій складальних виробів. Це призводить до частих переналагоджень автоматизованого обладнання на випуск нової продукції. Переналагодження має відбуватись за мінімально можливі проміжки часу із збереженням якості, надійності, високої продуктивності гнучкого складального виробництва.
Однією
з основних задач перехідного періоду
є визначення показників гнучкості
складальної системи. В якості загальної
міри гнучкості може використовуватись
економічно виправдане число переналагоджень
ГАЛС
![]() на кожен і-й тип виробів, випуск яких
запланований протягом визначеного
періоду:
на кожен і-й тип виробів, випуск яких
запланований протягом визначеного
періоду:
![]() ,
(6.1)
,
(6.1)
де
![]() -
нормативний коефіцієнт ефективності
капітальних вкладень,
-
нормативний коефіцієнт ефективності
капітальних вкладень,
![]() ,
,
![]() і
і
![]() - додаткові капітальні вкладення в
основні фонди, додаткові поточні затрати
і сумарні затрати, обумовлені простоями
обладнання при m–ному переналагодженні,
- додаткові капітальні вкладення в
основні фонди, додаткові поточні затрати
і сумарні затрати, обумовлені простоями
обладнання при m–ному переналагодженні,
![]() - сумарний розмір оборотних коштів в
незавершеному виробництві і-х деталей
чи вузлів після m – ного переналагодження.
Вхідними даними при визначенні
- сумарний розмір оборотних коштів в
незавершеному виробництві і-х деталей
чи вузлів після m – ного переналагодження.
Вхідними даними при визначенні
![]() є продуктивність КС, які входять в склад
ГАЛС.
є продуктивність КС, які входять в склад
ГАЛС.
Функціонування ГАЛС можна розділити на 2 періоди:
-
перехідний процес;
-
усталений (стаціонарний) режим роботи.
Перехідний процес може виникати в двох випадках:
-
при запуску лінії за двозмінного режиму роботи чи при оглядах і нерегламентованих ремонтах;
-
при переналагодженні ГАЛС на новий і-й тип виробів.
При переналагодженні ГАЛС незавершена продукція, яка відповідає попередньому (і-1) типу виробів і знаходиться на лінії передається на склад, тобто переходить в заділ. Потім проводиться переналагодження КС і допоміжного обладнання ГАЛС. Після чого в порожні накопичувачі завантажується продукція пробної і-ї партії виробів, запускається система і проводиться регулювання параметрів ГАЛС. Після виходу з останньої КС всіх виробів пробної і-ї партії процес переналагодження(перехідний) вважається завершеним.
В
ф-лі (6.1) вплив затрат на складання виробів
пробної партії враховується через
додаткові поточні затрати на регулювання
КС
![]() (входить в склад
(входить в склад
![]() )
і затрати обумовлені простоюванням
обладнання
)
і затрати обумовлені простоюванням
обладнання
![]() (входить
в склад
(входить
в склад
![]() ):
):
![]() ,
,
![]() ,
(6.2)
,
(6.2)
де
![]() - число КС в лінії,
- число КС в лінії,![]() - часова заробітна плата наладчика при
регулюванні к-ї КС,
- часова заробітна плата наладчика при
регулюванні к-ї КС,
![]() - середній час складання вузла на КС,
- середній час складання вузла на КС,
![]() - собівартість простою однієї станко-години
на КС при складанні вузла пробної партії.
- собівартість простою однієї станко-години
на КС при складанні вузла пробної партії.