

-
Идентификация параметров моделей систем на основе квадратичных методов оценивания
-
Линейные модели систем Рассмотрим систему линейных уравнений
![]() (1.1)
(1.1)
где A - матрица постоянных коэффициентов размерности (mЧn),
x - (nЧ1) - вектор неизвестных переменных состояния,
b - (mЧl) - вектоp выхода.
Предположим, что матрица состоит из т векторов, образованных из элементов строк

Множество векторов а1, а2, ..., аm содержит линейно зависимые векторы, если существуют такие действительные числа 1, 2, …, m, не все равные нулю, при которых обеспечивается равенство
![]() (1.2)
(1.2)
Если равенство (1.2) не соблюдается, то векторы а1, а2, ..., аm являются линейно независимыми. Например, матрица
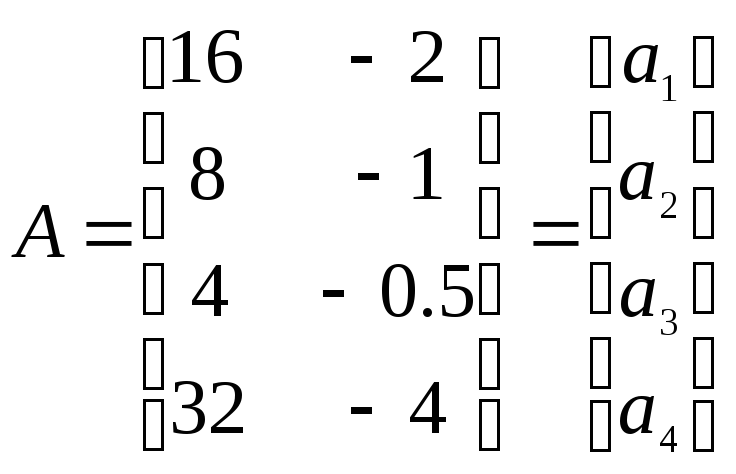
содержит все линейно зависимые строки, поскольку любой из векторов а1, ... а4 может быть получен путем умножения другого вектора на постоянное число
![]()
Ранг матрицы A есть максимальное число линейно независимых ее строк и столбцов. Для нахождения ранга матрицы в среде MatLAB используется оператор
rank(A) = 1,
т.е. A содержит все линейно зависимые векторы.
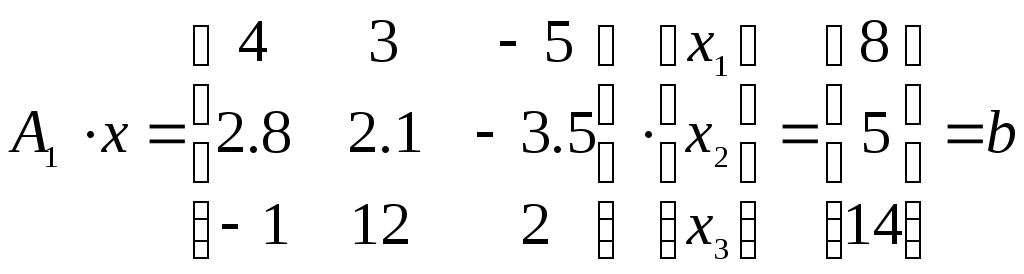
Рассмотрим линейное уравнение
 (1.3)
(1.3)
Поскольку матрица А1 является квадратной, то вектор x, казалось бы, должен определяться путем использования операции инверсии
![]()
B среде MatLAB инверсию выполним с помощью оператора "inv":
x = (inv(A1))*b.
Однако ранг A1 равен 2, и система уравнений плохо обусловлена, т.к. векторы, составленные из элементов первой и второй строк, являются линейно зависимыми.
Для существования точного решения уравнения (1.1) должно выполняться условие
rank(A)
=
![]() =
n,
(1.4)
=
n,
(1.4)
где (nЧn) — размерность квадратной матрицы A.
Возвращаясь к примеру (1.3), получим
rank(A1) = 2;
![]() =
3,
=
3,
т.е.
условие (1.4) не соблюдается, и точное
решение не существует, поскольку
![]()
Ранг прямоугольной матрицы размерности (mЧn) не обязательно равен min{m,n}, т.е.
rank(A) min{m,n}.
Если же
rank(A) = min{m,n},
то принято считать, что A имеет полный ранг.
Рассмотрим систему уравнений
![]()
где
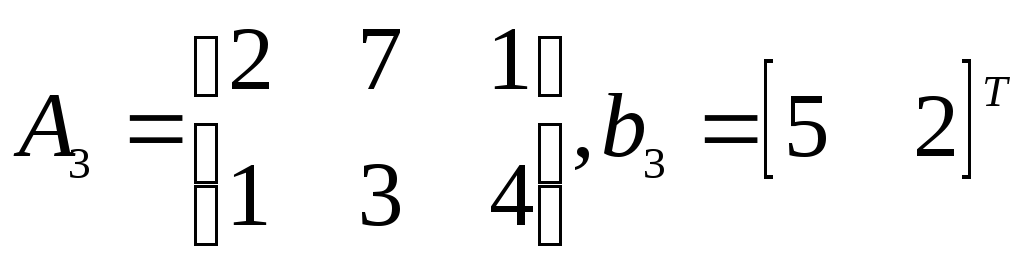
Определим ранг двух матриц
rank(A3) = 2,
![]()
Заметим, что число столбцов А3 больше числа строк и соблюдается условие
rank(A3 ) = rank([A3 • b3 ]) < n .
Поэтому мы получим множество решений для вектора
x = [x1 х2 х3]т.
Таковыми, например, являются
х = [- 1 1 0]Т; х = [0.3333 0.6267 -0.0533]Т и другие.
Если А3 имеет размерность (mЧn), причем т <n, то ее полный ранг равен т. Тогда множество любых т независимых векторов, составленное из столбцов A3 , образует базис матрицы. Из этих столбцов можно образовать квадратную матрицу B размерности (mЧm}, которая может быть подматрицей A3
A3 = [B N], (1.5)
где N состоит из столбцов, не вошедших в B. Размерность N равна [m(n - m)].
Согласно (1.5) можно произвести разложение вектора x на составляющие
x = [xB xN]T, размерности которых, соответственно, т и (n - m). Вектор xB cостоит из базисных переменных, a xN содержит небазисные переменные.
Очевидно, исходную систему линейных уравнений (1.1) в этом случае можно записать
[B
N]
![]() (1.6)
(1.6)
Полагая хN = 0, мы можем точно определить xB:
![]() (1.7)
(1.7)
поскольку в этом случае выполняется условие (1.4).
Концепция базиса матрицы играет фундаментальную роль в линейном программировании. Располагая множеством базисных решений, мы в принципе можем выбрать наилучшее из них в определенном критериальном смысле. Однако процедура выбора - достаточно сложная задача, решаемая методами математического программирования на компьютерах при наличии соответствующего программного обеспечения.
Возвратимся вновь к линейному уравнению (1.1). Если размерность A равна (mЧn}, причем т > n, то система оказывается переопределенной. B этом случае число уравнений больше числа неизвестных, и в процессе решения такой системы мы можем найти оценку вектора x, отвечающую в наилучшей степени всем уравнениям переопределенной системы. Такой "наилучшей" оценкой может быть, например, минимум эвклидовой нормы вектора
![]() (1.8)
(1.8)
где
![]() -
оценка вектора x
размерности (n1).
-
оценка вектора x
размерности (n1).
Напомним, что z имеет размерность (ml) и остановимся на данном вопросе более подробно.