5.4.3 Управление пуском в функции момента или тока.
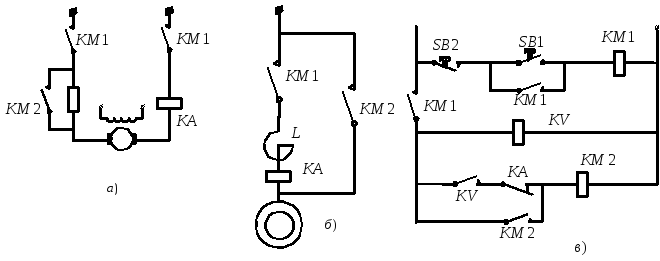
Рис.
5.13
Схемы управления пуском в функции тока приведены на рис.5.13. При включении линейного контактора КМ1 двигатель начинает разгоняться по первой пусковой характеристике. Одновременно замыкается контакт КМ1 в цепи катушек реле напряжения KV и контактора КМ2 рис.5.3, в. Реле KV срабатывает, но за время срабатывания этого реле успевает под действием пускового тока включиться токовое реле КА и разомкнуть свой н.з. контакт в цепи контактора КМ2, поэтому он останется отключенным. По мере разгона двигателя его ток уменьшается, и когла он достигает тока отключения реле КА, оно отключиться и замкнёт свой контакт в цепи КМ2. При этом двигатель продолжает разгоняться по естественной характеристике, а н.р. контакт контактора КМ2 шунтирует н.з. контакт токового реле КА. Это необходимо, что бы контактор КМ2 вновь не отключился бы при повторном броске пускового тока.
5.5 Функция «управление торможением».
Для остановки двигателя может быть использовано либо торможение противовключением, либо динамическое торможение. Задачей автоматического управления торможением является автоматическая сборка схемы и торможения при нажатии кнопки «стоп» и отключении двигателя от сети, и автоматическое отключение системы торможения при остановке двигателя. Управление торможением может осуществляться в функции скорости и времени.
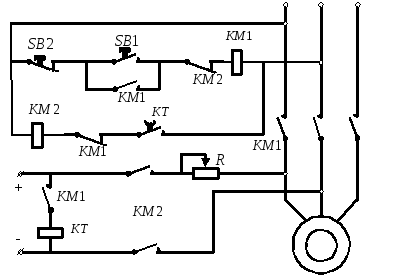
5.5.1 Управление динамическим торможением.
Рис.
5.14
уменьшением скорости уменьшается и напряжение на якоре, и при скорости, близкой к нулю, контактор КМ3 естественным образом отключается.
После отключения контактора КМ3 его н.з. контакт в цепи катушки КМ1 замыкается и система готова к новому пуск двигателя.
Рис.
5.15