

2.2. Проекція вектора на вісь
Н
Рис. 2. 4.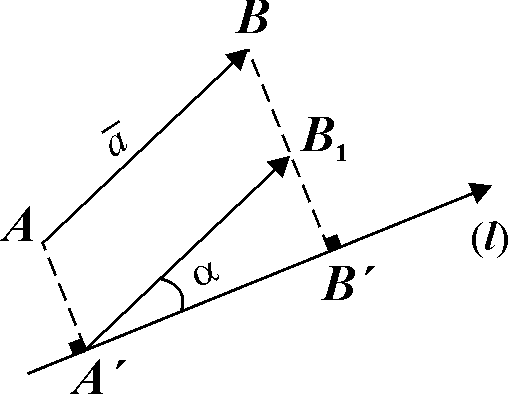
![]() – напрямлена пряма, тобто пряма, на якій
задано додатний напрям. Якщо на цій
прямій задано початок відліку і масштаб,
вона стає числовою прямою, тобто віссю.
Нехай
– напрямлена пряма, тобто пряма, на якій
задано додатний напрям. Якщо на цій
прямій задано початок відліку і масштаб,
вона стає числовою прямою, тобто віссю.
Нехай
![]() – будь-який вектор (рис. 2.4). Проведемо
перпендикуляри до осі
– будь-який вектор (рис. 2.4). Проведемо
перпендикуляри до осі
![]() з точки А
(з основою
з точки А
(з основою
![]() )
і з точки В
(з основою
)
і з точки В
(з основою
![]() ).
).
Означення.
Проекцією вектора
![]() на вісь
на вісь
![]() називається довжина відрізка
називається довжина відрізка
![]() ,
взята з додатним знаком, якщо напрями
вектора
,
взята з додатним знаком, якщо напрями
вектора
![]() і осі
і осі
![]() однакові, і з від’ємним знаком, якщо
напрями вектора
однакові, і з від’ємним знаком, якщо
напрями вектора
![]() і осі
і осі
![]() протилежні. Проекція вектора
протилежні. Проекція вектора
![]() на вісь
на вісь
![]() позначається
позначається
![]() або
або
![]() .
Таким чином
.
Таким чином
![]() =
=
Аналогічним чином визначається і проекція одного вектора на другий; в цьому разі перпендикуляри проводяться до прямої, на якій лежить цей другий вектор, а її напрямом вважається напрям цього вектора.
Відзначимо основні властивості проекцій.
1) При паралельному переносі вектора його проекція не змінюється (рис. 2.4).
2) Проекція
![]() = 0 тоді і тільки тоді, коли
= 0 тоді і тільки тоді, коли
![]() .
.
3) На
рис. 2.4 з ![]() бачимо, що
бачимо, що

 . (2.1)
. (2.1)
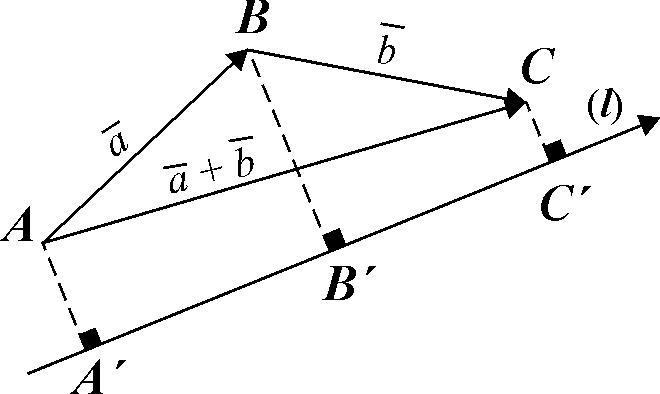
Рис.
2.5
![]() =
α
– кут між вектором
=
α
– кут між вектором
![]() та віссю
та віссю![]() .
Таким чином, знак проекції визначається
знаком
.
Таким чином, знак проекції визначається
знаком
![]() :
якщо
:
якщо
![]() ,
то кут
,
то кут
![]() гострий і косинус додатний, а якщо
гострий і косинус додатний, а якщо
![]() ,
то цей кут тупий і косинус від’ємний .
,
то цей кут тупий і косинус від’ємний .
4) Проекція суми векторів дорівнює сумі їх проекцій (рис. 2.5):
![]() . (2.2)
. (2.2)
5) Числовий множник можна винести за знак проекції:
![]() . (2.3)
. (2.3)
Це випливає, наприклад, з формули (2.1).
2.3. Декартові координати
З довільної точки простору О проведем три попарно перпендикулярні осі з однаковим масштабом. Точка О називається початком координат, a oci, які проходять через початок координат, називаються осями координат. Перша з них позначається Ох i називається віссю абсцис, друга вісь — Оу i називається вiccю ординат i третя — Оz — називається вiccю аплікат.Така система координат називається прямокутною або декартовою.
Площини, які проходять через oci координат, називаються координатними площинами. Вони поділяють пpocтip на вісім октантів.
Декартовими
координатами вектора
![]() у прямокутній системі координат
називаються його проекції на координатні
осі.
у прямокутній системі координат
називаються його проекції на координатні
осі.
Нехай
М
– будь-яка точка простору. Розглянемо
вектор
![]() –
радіус-вектор цієї точки.
–
радіус-вектор цієї точки.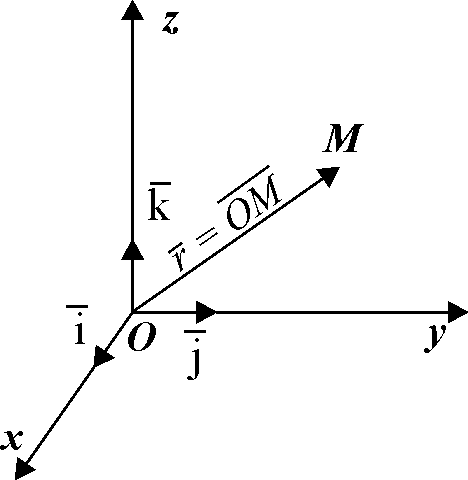
Координати
радіус-вектора точки М,
тобто числа
![]() ,
називаються декартовими
координатами точки М,
відповідно абсцисою, ординатою і
аплікатою цієї точки, що записується
,
називаються декартовими
координатами точки М,
відповідно абсцисою, ординатою і
аплікатою цієї точки, що записується
Рис. 2.
6 так:
М![]() .
.
Таким чином встановлюється взаємно однозначна відповідність між точками простору і упорядкованими трійками чисел – координат цих точок. Ця відповідність дає змогу розв’язувати геометричні задачі алгебраїчними методами, шляхом дій над координатами точок, що є предметом аналітичної геометрії.
Позначимо
через
![]() вектори одиничної довжини, напрями яких
співпадають з напрямами координатних
осей (див. рис. 2.6). Ці вектори називаються
базисними,
а
їх сукупність –
базисом.
Для кожного вектора
вектори одиничної довжини, напрями яких
співпадають з напрямами координатних
осей (див. рис. 2.6). Ці вектори називаються
базисними,
а
їх сукупність –
базисом.
Для кожного вектора
![]() має місце рівність
має місце рівність
![]() ,
(2.4)
,
(2.4)
де
![]() - координати вектора
- координати вектора
![]() .
Формула (2.4) називається розкладанням
вектора
.
Формула (2.4) називається розкладанням
вектора
![]() по базису.
по базису.
Треба зауважити, що взаємне розташування базисних векторів може бути двох типів. Якщо, дивлячись з кінця третього вектора, ми бачимо поворот від першого до другого проти годинникової стрілки, то кажуть, що вектори утворюють праву трійку (рис. 2.7 а), в противному разі ця трійка називається лівою (рис. 2.7 б). Відповідні системи координат також називають правою та лівою.
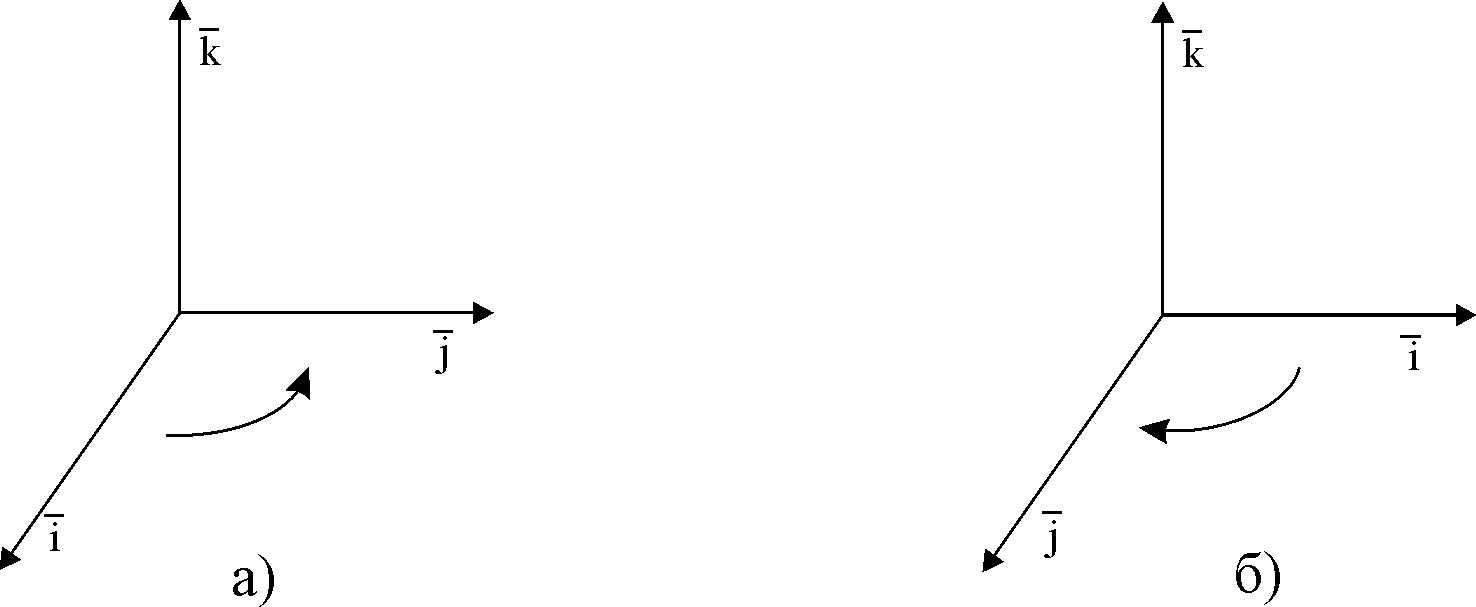
Рис. 2. 7
Така назва пов’язана з тим, що вектори правої трійки взаємно розташовані подібно до перших трьох пальців правої руки, а вектори лівої трійки – подібно до перших трьох пальців лівої. Надалі домовимося, як це робиться здебільшого в математичній літературі, користуватися правою системою координат.