

МІНІСТЕРСТВ ОСВІТИ І НАУКИ ТА МОЛОДІ І СПОРТУУКРАЇНИ ОДЕСЬКА ДЕРЖАВНА АКАДЕМІЯ БУДІВНИЦТВА І АРХІТЕКТУРИ
Кафедра землеустрою та кадастру
Третенков В. М.
ГЕОДЕЗИЧНІ ПРИЛАДИ.
Практикум з виконання лабораторних робіт.
Для студентів напряму ” Геодезія,картографія та землеустрій ”. Освітньо кваліфікаційний рівень 6.080101 – бакалавр. Спеціальність ” Землевпорядкування та кадастр ”. Форма навчання денна і заочна.
Одеса 2011.
УДК 528,517 (075,8). «ЗАТВЕРДЖЕНО»
Вченою радою факультету Економіки і управління будівництвом. Протокол № 3 від 3. 11. 2011 р.
Розглянуто і рекомендовано до друку на засіданні науково – методичної комісії факультету ЕкУБ, протокол № 2 від 27. 10. 2011р.
Розглянуто і рекомендовано до друку на кафедри землеустрою та кадастру, протокол № 3 від 17. 10. 2011р.
Третенков В.М. Геодезичні прилади. Практикум з виконання лабораторних робіт. Для студентів напряму “ Геодезія,картографія та землеустрій “. Освітньо кваліфікаційний рівень 6.080101 – бакалавр. Спеціальність ” Землевпорядкування та кадастр ”. Форма навчання денна і заочна.. – Одеса,ОДАБА, 2012. - 145 с.
Рецензенти:
Cоколов Ю. М. професор, д.т.н., О.Д.У. Екології. Юрковський Р.Г. професор, к.т.н., О.Д.А.Б.А.
У даному практикумі наведено стислий зміст необхідного теоретичного і практичного матеріалу, порядок виконання лабораторних робіт і контрольні запитання, які передбачено програмою навчального курсу “ Геодезичні прилади “ для студентів другого курсу напряму підготовки “Геодезія, картографія та землеустрій “. В основу цих робіт покладено вивчення конструктивних особливостей теодоліта 3Т2КП в цілому та його окремих модулів, проведення технологічних випробувань та досліджень з метою визначення головних метрологічних характеристик, які впливають на точність геодезичних вимірювань.
Практикум передбачений для самостійної роботи студентів спеціальності “ Землеустрій та кадастр “.
Відповідальний за випуск зав. кафедрою землеустрою та кадастру к. т. н. доцент Хропот С.Г.
Зміст. Сторінка Загальні положення . ………………………............... 7 Основні правила поводження з геодезичними приладами під час виконання робіт. ………………….. 9
Лабораторна робота № 1. Вивчення будови теодоліта 3Т2КП і визначення фактичної точності вимірювання кута……………………………………… 10 1.1. Основні метрологічні відомості …………………...10 1.2. Технічна характеристика теодоліта 3Т2КП……….11 1.3. Влаштування теодоліта 3Т2КП…………………....12 1.4. Центрування теодоліта над точкою………………..21 1.5. Порядок вимірювання теодолітом 3Т2КП. Відлічування по кругах . ………………………………..22 1.5.1.Вимір горизонтальних кутів і зенітних віддалей.24 1.5.2. Вимір віддалей і перевищень……………………..25 1.5.3. Пакування приладу………………………………. 26 1.6. Конструкція теодоліта 3Т2КП. …………………….27 1.7. Оптична схема теодоліта 3Т2КП …………………. 29 1.8.Визначення фактичної точності виміру кута………32 1.9. Приклад виміру напрямків і кутів способом кругових прийомів . ……………………………………..34 1.10. Порядок виконання лабораторної роботи………..39 1.11. Контрольні запитання. ………………………..40
Лабораторна робота № 2. Вивчення конструкції і основних оптичних характеристик зорової труби теодоліта 3Т2КП……………………………………… 41 2.1. Основні метрологічні відомості. …………………..41 2.2. Приклади визначення оптичних характеристик зорової труби ……………………………………………...50 2.2.1. Визначення якості зображення труби……………..50 2.2.2. Визначення кута поля зору труби…………………51 2.2.3. Визначення збільшення зорової труби. ………….53 2.2.4. Визначення кутової віддалі бісектора сітки ниток труби. ………………………………………………56 2.2.5. Визначення правильності руху фокусу - вальної лінзи зорової труби………………………………57 2.2.6. Визначення постійної ниткового від далеміра зорової труби. ……………………………58 2.3. Порядок виконання лабораторної роботи. ………… 61 2.4. Контрольні запитання. ……………………………….62
Лабораторна робота № 3. Вивчення конструкції і основних метрологічних характеристик відлікової системи теодоліта 3Т2КП……………………………… 62 3.1. Основні метрологічні відомості…………………… 62 3.2. Дослідження відлікових пристроїв………………… 72 3.2.1. Визначення похибок суміщення двосторонніх оптичних мікрометрів. ………………….. 72 3.2.2. Визначення Рена оптичного мікрометра. ……….75 3.2.3. Визначення Рена мікроскопа зі шкалою. ………..79 3.3. Порядок виконання лабораторної роботи. ………... 83 3.4. Контрольні запитання. ………………………….84
Лабораторна робота № 4. Вивчення конструкції і основних метрологічних характеристик рідинних рівнів та компенсатора нахилу теодоліта 3Т2КП…… 84 4.1. Основні метрологічні відомості про рідинні рівні.. 85 4.2. Випробування рідинних рівнів. …………………...92 4.2.1. Визначення ціни поділки рівня за допомогою нівелірної рейки ..………………………………………...92 4.2.2. . Визначення ціни поділки рівня способом повернення алідади довкола нахиленої осі теодоліта......95 4.3.Компенсатори нахилу. ……………………………….98 4.3.1. Принцип компенсації нахилу. Класифікація компенсаторів…………………………….98 4.3.2. Оптико – механічні компенсатори……………….101 4.3.3. Дослідження компенсатора нахилу нівеліра……102 4.3.4. Порядок визначення діапазону дій компенсатора нахилу. …………………………….103 4.4. Компенсатор вертикального круга теодоліта……..104 4.5. Випробування роботи компенсатора вертикального круга……………………………………..106 4.5.1. Визначення діапазону роботи компенсатора по лінії візування……………………………………… 106 4.5.2. Визначення впливу бічного нахилу теодоліта на точність роботи компенсатора…………107 4.6. Порядок виконання лабораторної роботи………...110 4.7. Контрольні запитання. …………………………….110
Лабораторна робота № 5. Вивчення конструкції і основних метрологічних характеристик осьових систем теодолітів………………………………………..111 5.1. Осьові системи теодолітів. ……………………… 111 5.2. Суть визначення ексцентриситету алідади горизонтального круга теодоліта. ……………………...121 5.3. Послідовність визначення ексцентриситету алідади горизонтального круга теодоліта 3Т2КП……..126 5.4. Послідовність визначення ексцентриситету алідади горизонтального круга теодоліта 3Т5КП…….129 5.5. Порядок виконання лабораторної роботи. … …… 133 5.6. Контрольні запитання. ……………………………. 134 Лабораторна робота № 6. Вивчення основних метрологічних вимог до зберігання й експлуатації геодезичних приладів. ………………………………………………… 135 6.1. Основні відомості. …………………………………...135 6.2. Порядок набуття навичок за доглядом приладів…..137 6.3. Технічне обслуговування…………………………... 138 6.4. Перевірка технічного стану приладу. …………… ..139 6.4.1. Зовнішній огляд. ……………………………………139 6.4.2. Перевірка взаємодії вузлів. ……………………….140 6.4.3. Перевірка окремих модулів. ……………………..141 6.4.4. Можливі несправності і способи їх усування……142 6.5. Контрольні запитання………………………………..145
ЛІТЕРАТУРА…………………………………………………………...6
1.Т.Г.Шевченко,О.І.Мороз,І.С.Тривого. Геодезичні прилади. - Львів: Львівська політехніка, 2006.- 459 с. 2.Третенков В.М. Дослідження і перевірки геодезичних приладів. Навчальний посібник - Одеса,ОДАБА,2007-197с. 3.Теодоліт 3Т2КП – паспорт. УОМЗ РФ,2004.- 61с. 4. ГОСТ 2613-84. Приборы геодезические. Методы испытаний. 5.Кузнецов П.И., Васютинский И.Ю., Ямбаев Х.К. Геодезическое инструментоведение. - М: Недра, 1984. - 364 с. 6. Маслов А.В., Гордеев А.В., Батраков Ю.Г. Геодезия. Учебное пособие для вузов. Изд.4, перераб. и доп. - М.: Недра, 1980. - 616 с. 7. Деймлих Ф. Геодезическое инструментоведение.–М.: Недра,1970.- 584 с. 8. Захаров А.И. Геодезические приборы (справочник). – М.: Недра, 1989.– 314.
ЗАГАЛЬНІ ПОЛОЖЕННЯ.
Навчальним
планом підготовки студентів напряму
«Геодезія, картографія та землеустрій»
передбачено навчальна дисципліна “
Геодезичні прилади “, яка є складовою
частиною навчального курсу “ Геодезія
“ .
.
Метою цієї дисципліни є навчити студентів другого курсу здобути необхідні знання про застосування геодезичних оптико-механічних приладів, про їх технічні характеристики та будову, про правила експлуатації, догляду і виконання метрологічних досліджень окремих модулів.
За основу покладено вивчення точного теодоліта 3Т2КП. Тому нами представлені для вивчення точних геодезичних приладів і виконання їх метрологічних досліджень наступні лабораторні роботи:
№1 - Вивчення будови теодоліта 3Т2КП і визначення фактичної точності вимірювання кута, №2 - Вивчення конструкції і основних оптичних характеристик зорової труби теодоліта 3Т2КП, №3 - Вивчення конструкції і основних метрологічних характеристик відлікової системи теодоліта 3Т2КП, №4 - Вивчення конструкції і основних метрологічних характеристик рідинних рівнів та компенсатора нахилу вертикального круга теодоліта 3Т2КП, №5- Вивчення конструкції і основних метрологічних характеристик осьових систем теодолітів, №6- Вивчення основних метрологічних вимог до чистки,змазування, зберігання й експлуатації геодезичних приладів.
Вивчення і виконання цих робіт дозволяє студентам спеціальності «Землеустрій та кадастр» професійно експлуатувати геодезичні прилади і застосовувати їх на практиці, кваліфіковано виконувати метрологічні випробування і геодезичні вимірювання.
Кожну лабораторну роботу повинна виконувати бригада студентів у складі трьох-чотирьох осіб під керівництвом викладача. До початку виконання лабораторної роботи студенти повинні старанно готуватися. Вони повинні знати мету і порядок виконання роботи, формули,за якими обчислюють показники вимірювань, назву та принцип дії приладу, яким користуються та відповідні контрольні запитання. Виконання кожної роботи розраховано на 4 години лабораторних занять і 4 години самостійної роботи після аудиторних занять. По закінченні кожної роботи студенти повинні скласти звіт. Результати спостережень, обчислень і розрахункові формули записують у звіті чорнилами. Схематичні креслення й графіки виконують акуратно (можна за допомогою ксерокопій). Студенти допускаються до виконання наступної лабораторної роботи тільки після одержання заліку за попередньо виконану роботу. Щоб одержати залік за семестр студенти повинні скласти і захистити звіти по всіх виконаних роботах і відповісти на контрольні запитання. Під час виконання робіт необхідно акуратно поводитися з геодезичними приладами, додержувати чистоту на робочому місці як під час роботи , так і після її закінчення.
При виконанні лабораторних робіт студенти повинні суворо дотримуватися правил техніки безпеки.
ОСНОВНІ ПРАВИЛА ПОВОДЖЕННЯ З ГЕОДЕЗИЧНИМИ ПРИЛАДАМИ ПІД ЧАС ВИКОНАННЯ РОБІТ.
1.Перш ніж витягти прилад з футляру, необхідно встановити стійко штатив.
2. Брати прилад з футляру треба за підставку (за верхню частину не дозволяється).
3.Після встановлення на штатив,прилад треба зразу закріпити становим гвинтом, а також (при необхідності) захистити від сонця і опадів.
4. Обертати рухомі частини слід повільно,без зусиль. Якщо обертати важко, треба знайти й усунути несправність.
5.Наводячі й підіймальні гвинти повинні працювати середньою частиною різьби.
6.Робота навідного гвинта повинна закінчуватися на вгвинчуванні. Якщо гвинт загвинтити більше не можна, його необхідно вигвинтити і знову вгвинтити.
7.При закріпленні зорової труби, алідади і тощо не слід сильно загвинчувати закріплюючі гвинти.
8. Під час роботи не можна залишати прилад без догляду.
9. При транспортуванні прилад слід оберігати від ударів (особливо приладів з компенсаторами). При переносі на невеликі віддалі на штативі прилад повинен знаходитися у вертикальному положенні.
10. При укладанні приладу у ящик, закріплюючі гвинти треба відпустити, покласти прилад, закріпити пакувальні гвинти і тільки потім закріпити закріплюючі гвинти приладу. 11. Футляр теодоліту 3Т2КП являє собою пластмасовий корпус з двох половин, які заповнені ложементами з пружного пластику для охоплення поверхні теодоліта.
12. При замиканні половин футляру і закріпленні їх замками, теодоліт надійно фіксується ложементами,що забезпечує його збереженість при транспортуванні. Замки мають фіксатори для попередження само відкривання.
13. У відсіках футляру в спеціальних боксах запаковані інструмент і належності, що входять в комплект теодоліта. Футляр комплектується знімальними ременями для перенесення його за спиною.
ЛАБОРАТОРНА РОБОТА № 1.
Вивчення будови теодоліта 3Т2КП і визначення фактичної точності вимірювання кута.
Мета роботи : здобути необхідні знання про будову і технічні характеристики приладу, його призначення, правила догляду і експлуатації та визначення фактичної точності виміру кута.
1.1.Основні метрологічні відомості .
Теодоліт 3Т2КП призначений для вимірювання кутів в тріангуляції і полігонометрії 3,4 класів, для астрономічних спостережень, монтажу промислового устаткування та виконання інших точних і високоточних робіт.
1.2.Технічна характеристика теодоліта 3Т2КП.
Середня квадратична похибка вимірювання кута одним прийомом не перебільшує : - горизонтального кута 2”, вертикального кута 2,4”, - діапазон виміру зенітних віддалей 30-145°.
3орова труба Зображення----------------------------------------------------пряме Збільшення----------------------------------------------------30× Поле зору------------------------------------------------------1° 35′ Найменша віддаль візування ,м--------------------------0,9-1,5 Коефіцієнт нитяного віддалеміра-----------------------100±0,5 Зовнішній діаметр оправи об`єктива,мм-----------------48 Діаметр вихідної зіниці,мм--------------------------------1,34 Фокусна віддаль об`єктива,мм----------------------------239 Відлікова система Діаметр горизонтального і вертикального кругів,мм----90 Ціна поділки: - кругів-----------------------------------------------------------20′ - шкали мікроскопа---------------------------------------------1″ - круга – шукача-----------------------------------------------10° Діапазон роботи компенсатора при вертикальному крузі, не менше------------------------±3′ Похибка компенсації на 1′ нахилу---------------------------0,8″ Збільшення мікроскопів, кратність --------------------------20× Похибка відлічування-------------------------------------------0,1″
Ціна поділки рівнів: циліндричного ---------------------------------------------------15″ сферичного---------------------------------------------------------5′
Оптичний центрир Зображення----------------------------------------------------пряме Збільшення, кратність---------------------------------------2,5× Поле зору------------------------------------------------------4°30′ Найменша віддаль візування, м---------------------------0,6
Маса, кг Теодоліт з підставкою ---------------------------------------4,7 Теодоліт у футлярі з належностями-----------------------9,2 Штатив----------------------------------------------------------5,6
Габаритні розміри,м
Теодоліт з підставкою -------------------------345×183×123 Футляр---------------------------------------------470×240×210 Штатив---------------------------------------ø160×(1000-1600)
1.3.Влаштування теодоліта 3Т2КП.
Теодоліт 3Т2КП ( рис.1.1 і 1.2) модульного типу і складається із наступних модулів.
Це зорова труба, вертикальна вісь з горизонтальним кругом, колонка з горизонтальною віссю і вертикальним кругом, система відлічування і відліковий мікроскоп, мікрометри, навідні пристрої, оптичний центрир і підставка з трьома підіймальними гвинтами.
Зорова труба 19 (рис.1.1) прямого зображення, переводиться обома кінцями через зеніт і фіксується
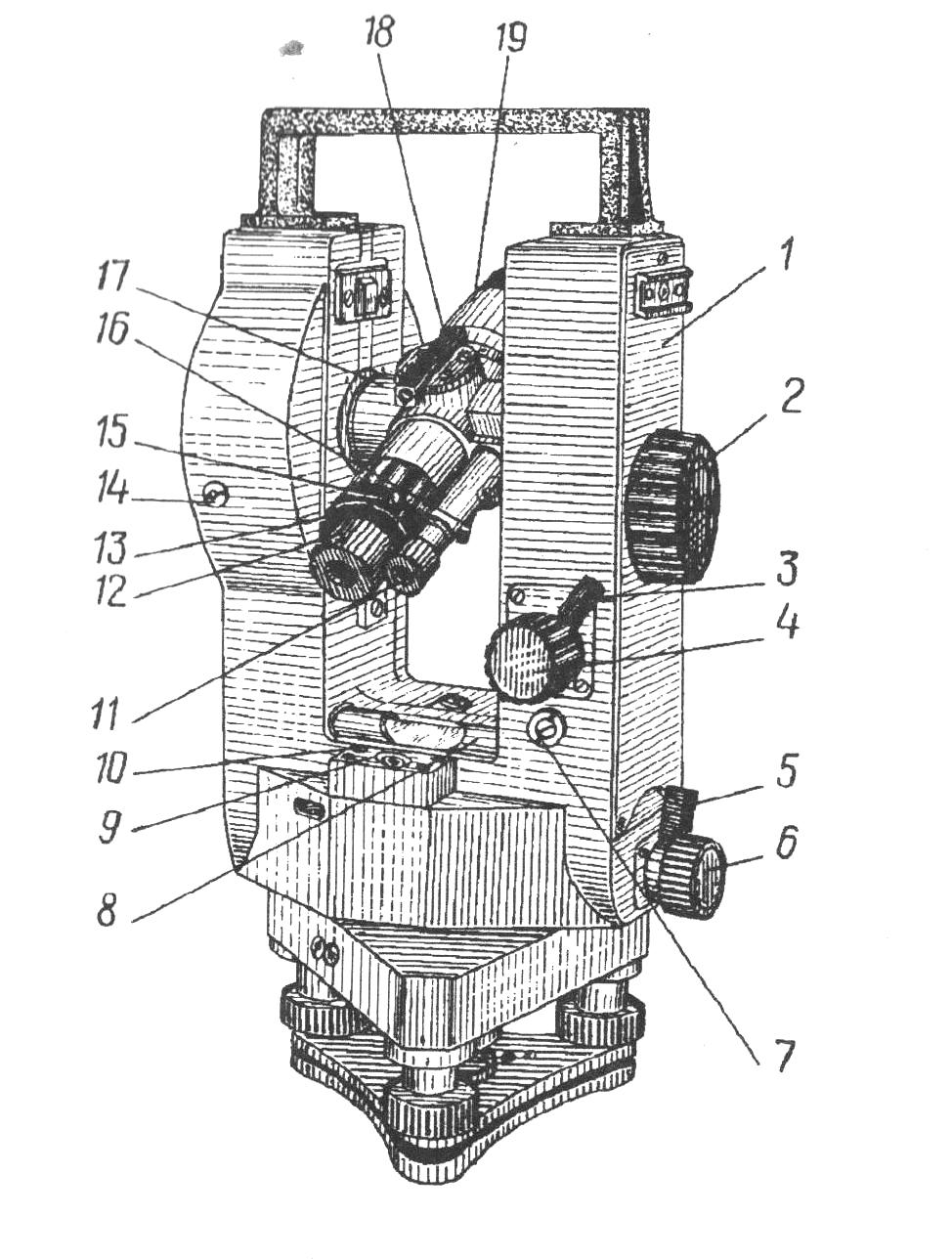
Рис. 1.1.Теодоліт 3Т2КП ( вертикальний круг зліва . Позначення: 1 – бічна кришка, 2 – рукоятка мікрометра, 3,5 – закріпні гвинти, 4,6- навідні гвинти, 7,10 – юстувальні гвинти рівня, 8,9 – рівні при алідаді горизонтального круга, 11- установчий гвинт, 12 – окуляр зорової труби, 13 – ковпачок, 14 – штекер на гніздо, 15- кремальєра, 16- прапорець відбивача, 17- горизонтальна вісь, 18 - коліматорний візир, 19 – зорова труба. .

Рис 1.2 Теодоліт 3Т2КП (вертикальний круг справа . Позначення: 1 – ручка, 2 – клинове кільце, 3 – бічна кришка, 4 – упор, 5 – дзеркало, 6 – юстувальний гвинт, 7- установчий гвинт, 8 – рукоятка, 9 – підіймальний гвинт, 10 - закріпний гвинт, 11- гвинт, 12- підставка, 13- ілюмінатор круга – шукача, 14- окуляр оптичного центрира, 15 - пробка для юстування Рена вертикального круга, 16 – рукоятка перемикача, 17- колонка.
кремальєрою. Окуляр 12 встановлюється за оком спостерігача оберненням діоптрійного кільця до появи чіткого зображення сітки ниток (рис.1.3).

Рис.1.3. Сітка ниток.
Два горизонтальних штриха сітки ниток, що вище і нижче перехрестя відносяться до нитяного далекоміра . На краю поля зору труби нанесено покажчик (стрілка) напряму обернення кремальєри при фокусуванні на нескінченість. Зорова труба закріплена в горизонтальній осі 17. Між корпусом і віссю труби встановлено клинове кільце 2 (рис.1.2) для усування колімаційної похибки. Наведення зорової труби на ціль здійснюється за допомогою коліматорного візиру та оберненням її навколо горизонтальної і вертикальної осей. Вертикальна вісь пів кінематичного типу опирається на кульки у верхній частині; вона забезпечує високу точність виміру горизонтальних кутів і зенітних віддалей. На втулці вертикальної осі закріплений горизонтальний круг, який поділений через 20′ і цифрований через 1°. Горизонтальна вісь встановлена в лагерах , що закріплені в стійках колонки 17 (рис.1.2). На горизонтальній осі розташований вертикальний круг, який поділений через 20′ і цифрований через 1°. Відлікові пристрої дозволяють брати відлік з протилежних боків кутомірних кругів, що виключає вплив ексцентриситету на результат виміру. Відлікова система вертикального круга змонтована на одній платі у вигляді окремого модуля, що забезпечує зручність її збирання, юстування і ремонту. На платі відлікового модулю на пружному підвісі встановлений маятник само установчого компенсатора. В якості оптичного елемента компенсатора застосована призма з дахом. Коливання маятника гасяться двома заспокою - важелями (демпферами), які розташовані з обох сторін рамки маятника. Зображення горизонтального і вертикального круга вводяться в мікрометр по двох незалежних оптичних каналах. Перемикання каналів робиться поворотом рукоятки 16 на 90° . При горизонтальному положенні рукоятки у полі зору мікроскопа видно зображення штрихів горизонтального круга, при вертикальному положенні зображення штрихів вертикального круга, офарбоване жовтим фоном. Мікрометр, що розташований з боку кришки 1 (рис.1.1) , служить для виміру частки поділок лімба. При оберненні рукоятки 2 зображення діаметрально протилежних штрихів лімба переміщаються назустріч один одному. Після суміщення штрихів по шкалі мікрометра визначають частку поділок лімба у кутовій мірі. Відліковий мікроскоп розташований поряд із зоровою трубою. Оберненням діоптрійного кільця окуляр 11 мікроскопа встановлюється за оком спостерігача. Поворотом і нахилом дзеркала 5 (рис.1.2) досягається оптимальне освітлення поля зору відлікової системи. Круг – шукач напрямів в теодоліті дозволяє гвинтом 7 встановлювати точний відлік по горизонтальному кругу у початку вимірювання. Навідні гвинти 4 і 6 (рис.1.1) співвісні із закріпними гвинтами 3 і 5 головка яких виконано у вигляді курка. Після закріплення гвинтів проводять точне наведення перехрестя сітки зорової труби на ціль навідними гвинтами.
Два рівня встановлені на алідадній частині горизонтального круга. Сферичний рівень 9 призначений для попереднього приведення до горизонту теодоліта, а циліндричний рівень 8 – для точного встановлення вертикальної осі теодоліта у прямовисне положення.
Положення осі сферичного рівня виправляють гвинтами 10, циліндричного рівня – юстувальним гвинтом 7.
Оптичний центрир (рис. 1.4) вбудований в алідаду, його окулярна частина скріплена гвинтами 11 (рис.1.2) з колонкою 17.
Окуляр 14 встановлюють за оком поворотом діоптрійного кільця до появи чіткого зображення кругів сітки. Поздовжнім переміщенням окулярного колена центрир фокусують на визначену точку зйомки.
Ручка 1 для переносу теодоліта і встановлення візирної вишки або марки закріплення на стойках колонки 17 (рис.1.2).
Підставка 12 служить для закріплення теодоліта гвинтом 10. Підставка знімається, що дозволяє виконувати вимірювання трьох - штативним методом. Оберненням підіймальних гвинтів 9 вертикальну вісь теодоліта встановлюють прямовисно.
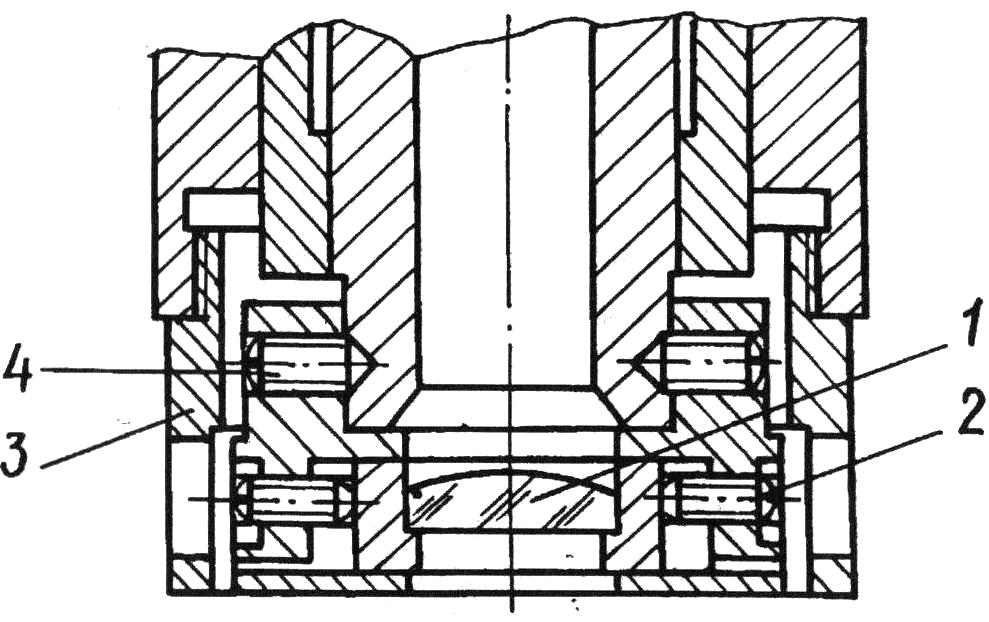
Рис.1.4. Оптичний центрир.
1- лінза, 2, 4 – гвинти, 3 - ковпачок.
Ліхтар електроосвітлення закріплюють на упорах 4 (рис.1.2) бічної кришки 3. Штекер ліхтаря вводять у гніздо розняття. Ліхтар освітлює одночасно кутомірні круги і сітку ниток зорової труби. Інтенсивність освітлення сітки регулюється поверненням прапорця 16 (рис.1.1). При роботі без електроосвітлення рукоятка прапорця повинна бути повернена у сторону вертикального круга.
Орієнтир – бусоль встановлюють для орієнтування візирної осі теодоліта відносно магнітного меридіану на бічній кришці і кріплять гвинтом 1(рис.1.5).Положення магнітної стрілки спостерігають у дзеркалі, якому придають потрібний нахил. Стрілку аретирують гвинтом 3. Її північний кінець офарбований у синій колір , на південному кінці установлений пересувний вантаж для зрівноваження .
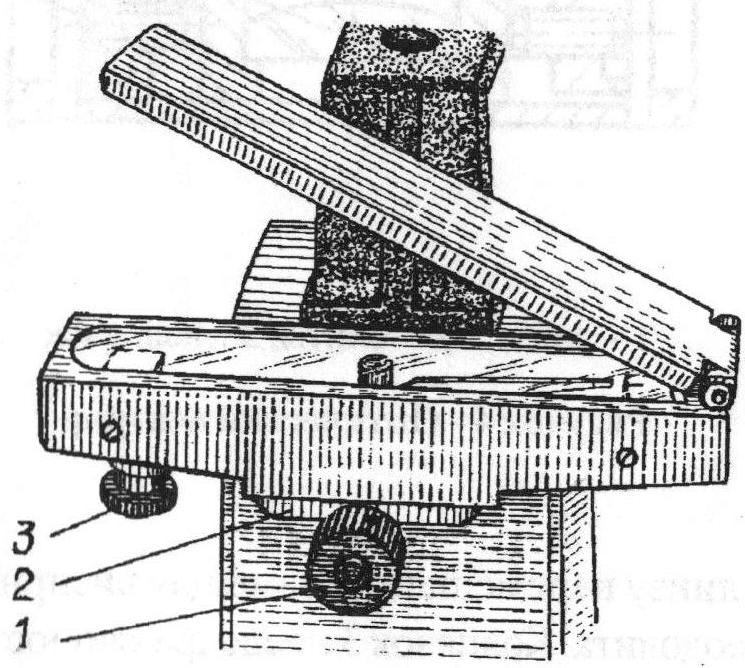
Рис. 1.5. Орієнтир – бусоль. 1- закріпний гвинт, 2- кронштейн, 3- гвинт аретира.
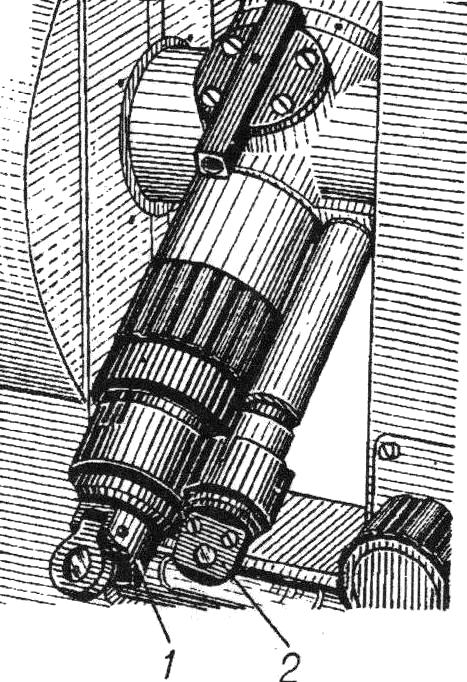
Рис. 1.6. Окулярні насадки.
1 – на зорову трубу, 2 – на мікроскоп .
Окулярні насадки (рис.1.6) застосовують для зручності візування на цілі, які розташовані під значними кутами до горизонту. Штатив служить для встановлення теодоліта над визначеною точкою зйомки – вершиною вимірюваного кута. Теодоліт закріплюють на штативі становим гвинтом . На гачок у середині гвинта підвішують нитяний висок. Нитяний висок і гайковий ключ вкладені у пенал на нижчі штатива (рис. 1.7).
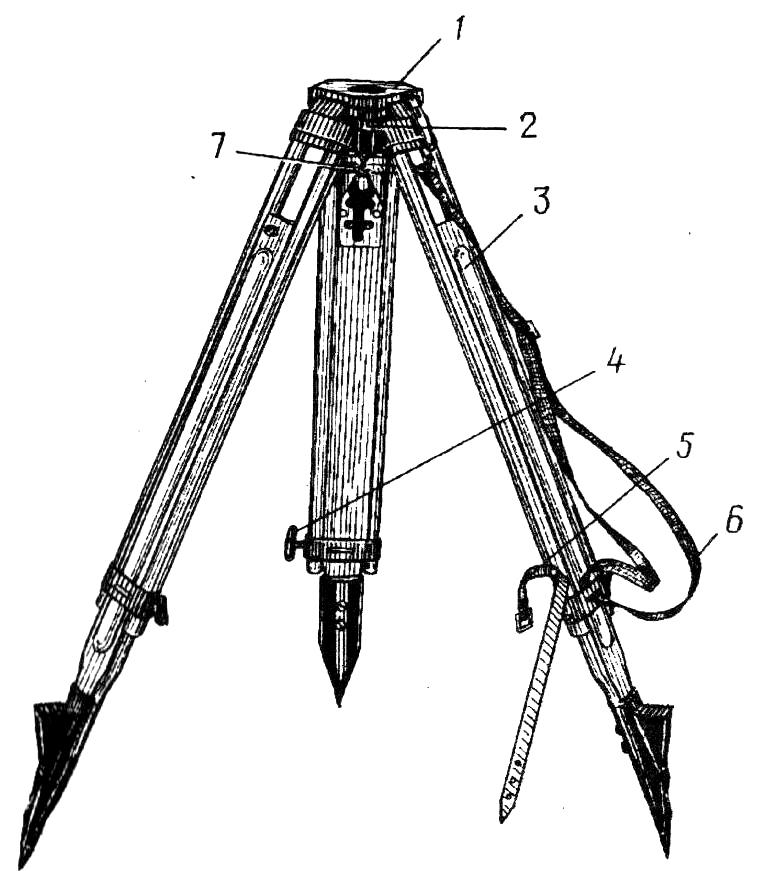
Рис. 1.7. Штатив теодолітний. 1 – головка, 2 – бовт, 3 – ніжка, 4 – гвинт, 5,6 – ремні, 7 – гвинт становий.
1. 4.Центрування теодоліта над точкою.
Центрування можна виконувати двома способами.
Перший спосіб центрування виконується з допомогою нитяного виска і оптичного центрира.
Другій спосіб виконується тільки з допомогою оптичного центрира.
Порядок центрування першим способом.
1. Закріпити нитяний висок на гачок станового гвинта. 2. Відпустити становий гвинт і перемістити теодоліт на головці штатива до суміщення гострі`я виска з центрованою точкою. 3. Покласти висок у пенал штатива і підіймальними гвинтами підставки привести бульбашку рівня у середнє положення та ввести зображення точки у центр кола сітки ниток центриру шляхом переміщення теодоліта на площині головці штатива. 4. Закріпити теодоліт становим гвинтом , перевірити положення бульбашки рівня і зображення точки у полі зору оптичного центриру. 5. Перевірити правильність юстирування центрира, для цього повернути алідаду на 180° і, якщо суміщення зображення точки не відповідає допустимої похибки центрування, перемістити теодоліт на половину неспівпадання теодоліта так, щоб при оберненні алідади зображення точки описувало коло, яке було б концентричне колу сітки ниток.
Примітка. Радіус малого кола сітки ниток при висоті штатива 1,2 м відповідає 2 мм на місцевості.
Другий спосіб центрування.
1. Оберненнями підіймальних гвинтів підставки сумістити зображення точки з центром кола сітки ниток оптичного центрира. 2. Послідовно регулюваннями довжини всіх ніжок штатива привести бульбашку рівня при алідаді горизонтального круга в межі шкали на ампулі, обертаючі теодоліт навколо вертикальної осі так, щоб один кінець рівня розташовувався понад регульованою ніжкою штатива. 3. Підіймальними гвинтами підставки виставити горизонт теодоліта і, якщо зображення точки не співпало з центром сітки ниток центрира, сумістити їх переміщенням приладу на головці штатива. 4. Закріпити теодоліт становим гвинтом, уточнити установлення рівня підіймальними гвинтами підставки, перевірити центрування по сітці ниток оптичного центрира, поворотом алідади на 180°, переконатися в точності юстування центрира. Якщо суміщення зображення точки не відповідає допустимої похибки центрування, перемістити теодоліт на половину неспівпадання так, щоб при оберненні алідади зображення точки описувало би коло, що концентричне колу сітки ниток.
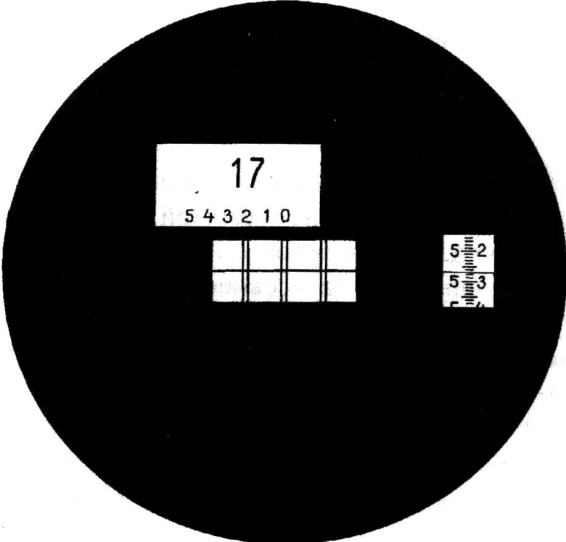
1.5.Порядок вимірювання теодолітом 3Т2КП . Відлічування по кругах . . У центральному вікні поля зору відлікового мікроскопа (рис.1.8) находяться зображення діаметрально протилежних штрихів лімба, які розділені лінією, у верхньому вікні – цифри градусів, нижче – шість цифр (від 0 до 5), які вказують десятки хвилин до відліку у правому вікні – по шкалі мікрометра. Лівий рядок цифр цієї шкали мікрометра відповідає одиницям хвилин,а правий рядок цифр – десятки і одиниці секунд.
Поперед відлічування треба ретельно сумістити рукояткою мікрометра середні лінії верхнього і нижчого зображень біфілярних штрихів лімбу горизонтального або вертикального круга. Якщо у верхньому вікні два підписаних градуси, то робочим є число, що находиться у межах цифр десятків хвилин. Цифра, що розташована під серединою числа градусів, показує кількість десятків хвилин. До них треба додати одиниці хвилин (лівий рядок цифр), десятки і одиниці секунд (правий ряд цифр) зі шкали мікрометра.
На рис.1.8 відлік 17°25′ 27″.
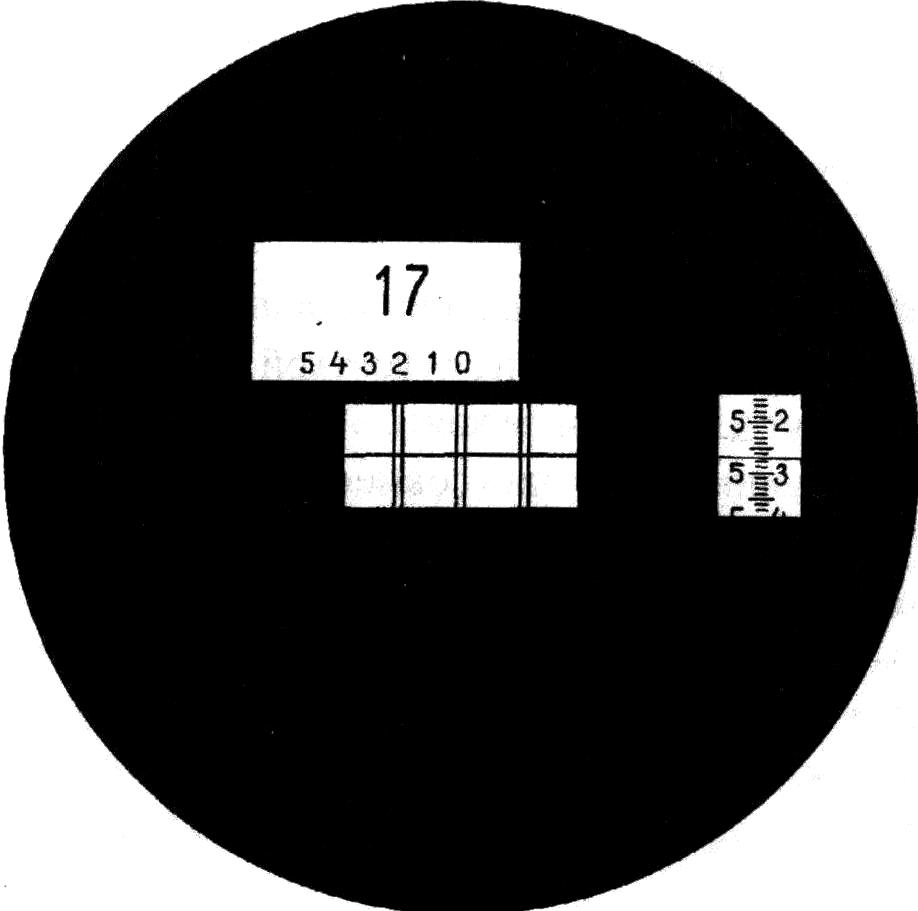
Рис.1.8. Поле зору мікроскопа.
1.5.1 Вимір горизонтальних кутів та зенітних віддалей. Найменша похибка виміру горизонтального кута і зенітної віддалі забезпечується при виконанні вимірів повними прийомами (при положенні вертикального круга зліва – круг ліво і справа – круг право). Число прийомів залежить від потрібної точності результату виміру, впливу зовнішніх умов і установлюється відповідними інструкціями з виробництва геодезичних робіт.
Горизонтальний круг рекомендується вимірювати парним числом прийомів. Після кожного прийому круг необхідно переставляти на 180°/n (n- кількість прийомів ) для зменшення впливу похибок діаметрів лімба.
Зенітні віддалі z обчислюють за одній із наступних формул:
z =0,5(Л – П + 360°); (1.1)
z = Л - М z ; (1.2)
z = М z – П + 360°, (1.3)
де М z = 0,5(Л + П -360°) - місце зеніту, (1.4) Л , П – від ліки по вертикальному кругу при його положенні зліва (круг ліво) і справа (круг право) від спостерігача. Вертикальні кути υ обчислюють за формулами
υ = 0,5(П – Л) - 90°, (1.5)
υ = 90° - z . (1.6) Щоб встановити точний відлік по заданому напрямку, слід навести зорову трубу на ціль, рукояткою 2 (рис.1.1) установити відлік одиниць хвилин і секунди, рукояткою 8 (рис.1.2) – відлік градусів і десятки хвилин, а гвинтом 7 точно сумістити штрихи горизонтального круга.
1.5.2. Вимір віддалей і перевищень.
Віддалі
і перевищення вимірюють за допомогою
нитяного віддалеміра по вертикальній
рейці із сантиметровими поділками.
Визначають віддаль
відрізка рейки, що
заключний між віддалемірними штрихами
сітки, в см. Горизонтальне прокладення
S обчислюють
за формулою
S
= К ℓ , (1.7)
де
К - коефіцієнт
віддалеміра;
, (1.7)
де
К - коефіцієнт
віддалеміра;
 - зенітна
віддаль,
яка вимірюється під
час наведення на рейку; 𝓁
– відрізок по рейці
між віддалемірними штрихами сітки
ниток, в см. При К
=100
віддаль S
обчислюється за формулою
S
= L
, (1.8)
де L
- число
сантиметрових поділок рейки між
віддалемірними штрихами,
що вказані на сітці ниток. Точність
заводського установлення коефіцієнта
віддалеміра складає
1 : 200.
Для виміру віддалі з
більшою точністю необхідно попередньо
визначити поправку ∆,
що
враховує відхилення
коефіцієнта
віддалеміра К від
100 за формулою :
- зенітна
віддаль,
яка вимірюється під
час наведення на рейку; 𝓁
– відрізок по рейці
між віддалемірними штрихами сітки
ниток, в см. При К
=100
віддаль S
обчислюється за формулою
S
= L
, (1.8)
де L
- число
сантиметрових поділок рейки між
віддалемірними штрихами,
що вказані на сітці ниток. Точність
заводського установлення коефіцієнта
віддалеміра складає
1 : 200.
Для виміру віддалі з
більшою точністю необхідно попередньо
визначити поправку ∆,
що
враховує відхилення
коефіцієнта
віддалеміра К від
100 за формулою :
S
= (L , (1.9)
а потім використати у формулі
(1.9) для обчислення S.
, (1.9)
а потім використати у формулі
(1.9) для обчислення S.
При
кутах нахилу віддалі менше 20°
допускається користування
формулою S
= L
+ . (1.10)
. (1.10)
Методика визначення розглянуто в лабораторній роботі №2 при дослідженні зорової труби. Перевищення h між точками обчислюють за формулою
h = 0,5L +𝓁 – v , (1.11) де 𝓁 – висота приладу; v – віддаль відрізка рейки від її початку до штриха , що співпадає з горизонтальним штрихом перехрестя сітки ниток.
1.5.3. Пакування приладу.
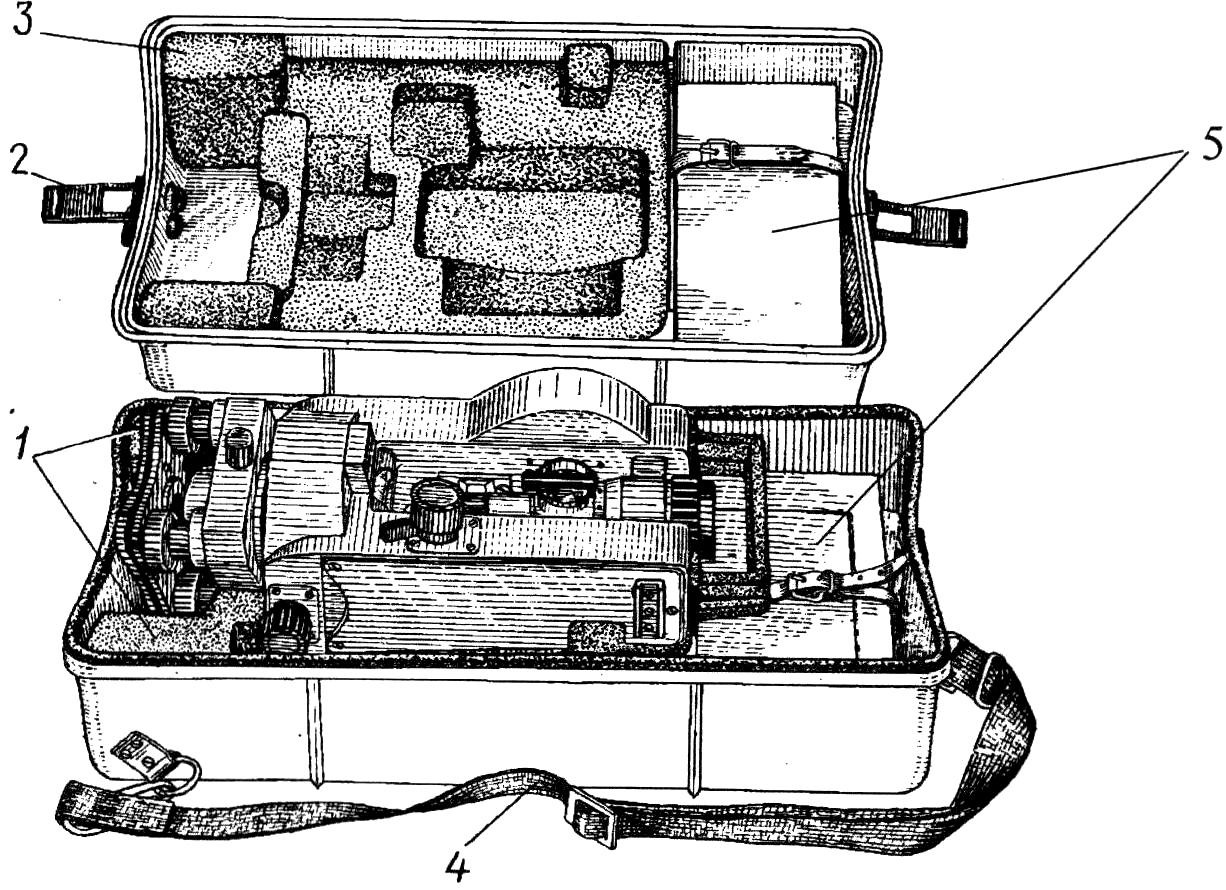
Рис. 1.9. Футляр. 1,3 – ложементи,2 – замок, 4-знімальний ремінь, 5 - бокси з інструментами і належностями.
Належності до приладу і теодоліт покладають у відповідні гнізда боксів. Поперед пакування теодоліт повертають так, щоб круглий рівень находився понад закріпним гвинтом підставки, а зорову трубу направити у зеніт; закріпити алідаду і зорову трубу. Теодоліт покласти у футляр, закріпити кришкою і скріпити футляр замками (рис.1.9).
1.6.
Конструкція теодоліта 3Т2КП.
Конструкція
теодоліта 3Т2КП наведена на схемі його
перерізу (рис.1.10). Згідно з позначеннями
маємо:
1 – рукоятка для
переносу теодоліта;
2 – горизонтальна вісь
обертання зорової труби;
3 – зорова труба теодоліта;
4 – гвинт
кріплення зорової труби;
5 - гвинт
кріплення рукоятки; 6 – плата мікрометра;
7 і 38 – бічні кришки;
8–
маховичок оптичного мікрометра;
9 –
кришка маховичка; 10 – фланець маховичка;
11 – відліковий мікроскоп;
12 – ромб-призма перемикання каналів
відлікових кругів;
13,15 – лінзи
об`єктива горизонтального круга;
14 – корпус оптичного містка
горизонтального круга; 16,31 – кінцеві
призми оптичного містка горизонтального
круга; 17,30 – лінзи оптичного містка
горизонтального круга; 18 – призма
передавання променя горизонтального
круга; 19 – гайка; 20
- об`єктив оптичного центрира; 21 – обойма;
22 – втулка;
23 – довгофокусна лінза
оптичного центрира;
24 – кришка; 25 – хвостовик
теодоліта; 26 – вісь алідади;
27 – нижня кришка; 28 – призма
з колективом; 29 –
горизонтальний круг;
 Рис.1.10.
Теодоліт 3Т2КП (переріз).
Рис.1.10.
Теодоліт 3Т2КП (переріз).
32 – пристрій юстування місця зеніту вертикального круга; 33 - об`єктив вертикального круга; 34 – біпризма; 35 – призма з дахом компенсатора; 36,37 – лінзи об`єктива вертикального круга; 39 43 – призми передавання променя вертикального круга; 40 – вертикальний круг; 41 – колонка; 42 – призма підсвічування вертикального круга; 43 – гвинт оптичного містка горизонтального круга; 45 – втулка гвинта.
Таким чином, на перерізі бачимо зорову трубу, двосторонній оптичний мікрометр з двома парами оптичних клинів, одна з яких може рухатися плоско паралельно.
Теодоліт має компенсатор вертикального круга та зорову трубу з прямим зображенням візирної цілі.
1.7. Оптична схема теодоліта 3Т2КП.
Оптична
схема теодоліта 3Т2КП наведена на
(рис.1.11) , а саме:
1 – ілюмінатор; 2 – дзеркало
освітлення;
3 – призма з дахом компенсатора;
4 - біпризма; 5,6
– дзеркало освітлення горизонтального
і вертикального круга; 7,9 – лінзи
об`єктива системи обертання вертикального
круга; 8 - вертикальний круг; 10 - об`єктив
зорової труби; 11,47
– призми передавання променя вертикального
круга; 12,13 – призми
освітлення вертикального круга;
14 – пента - призма; 15 – шкала
мікрометра; 16 – фокусу - вальний компонент
зорової труби; 17 – подільний блок
призм; 18 - об`єктив
мікроскопа;

![]() Рис.
1.11. Оптична схема теодоліта 3Т2КП.
Рис.
1.11. Оптична схема теодоліта 3Т2КП.
19 – рухомі клини оптичного мікрометра; 20 – призма Аббе (обертальний блок); 21 – сітка ниток зорової труби; 22 – окуляр мікроскопа; 23 - окуляр зорової труби; 24 - нерухомі клини оптичного мікрометра; 25 – ромб-призма перемикання каналів відлікових систем; 26,28 - лінзи об`єктива горизонтального круга; 27 – призма; 29,43 - лінзи об`єктива вертикального круга; 30,38 – кінцеві призми оптичного містка горизонтального круга; 31 - призми передавання променя горизонтального круга; 33 – призма з дахом оптичного центрира; 34 - об`єктив оптичного центрира; 35 – довгофокусна лінза оптичного центрира; 37 - призма освітлення горизонтального круга; 39 - горизонтальний круг; 40,41 – призми блока передавання; 42 – колектив – сітка оптичного центрира; 44 – окуляр оптичного центрира; 45 – плоско паралельна платівка пристрою юстування місця зеніту вертикального круга; 46 – довгофокусна лінза пристрою юстування місця зеніту вертикального круга.
На рис.(1.11) поодинокою стрілкою позначено шлях променів до відлікового мікроскопа від вертикального круга, а подвійною стрілкою – від горизонтального круга. Коли відлічують горизонтальний круг, ромб – призму перемикання каналів відлікових систем (кругів) 25 відводять, повернувши перемикач каналів (кругів). Оптичний мікрометр теодоліта 3Т2КП має рухомі клини. Приклад відлічування зображено на рис.1.9.
1.8. Визначення точності вимірювання кута .
Вимірювання
кута супроводжується цілим рядом
похибок, таких як інструментальні,
власного вимірювання, візування,
відлічування, центрування теодоліта і
візирних цілей, впливом зовнішніх умов,
тощо. Сумарне значення всіх цих похибок
характеризує точність даного теодоліта.
Для визначення сумарної
похибки виміру горизонтального кута у
польових умовах встановлюють теодоліт
над точкою (вершиною кута) і визначають
дві візирні цілі. Горизонтальний кут
вимірюють 6 – 12 прийомами і результати
виміру записують в журнали 1 і 2. За
значення кутів обчислюють середнє
арифметичне значення з усіх прийомів
за формулою:
 ср =
ср = Σ
Σ (1.12) а також середню
квадратичну похибку по відхиленнях від
середнього окремих виміряних значень
за формулою:
(1.12) а також середню
квадратичну похибку по відхиленнях від
середнього окремих виміряних значень
за формулою:
 , (1.13) де
, (1.13) де
 – відхилення від
середнього значення результатів окремих
вимірів кута; n – число прийомів;
- окреме
виміряне
значення кута.
– відхилення від
середнього значення результатів окремих
вимірів кута; n – число прийомів;
- окреме
виміряне
значення кута.
Поперед кожного прийому виміру кута бажано виконувати початкове установлення лімбу горизонтального круга на відлік φ , який визначають за формулою φ = 180°/n , (1.14)
 =
φ (р - 1),
(1.15)
де р – номер прийому виміру кута;
n
– кількість прийомів.
=
φ (р - 1),
(1.15)
де р – номер прийому виміру кута;
n
– кількість прийомів.
Так,
наприклад, у першому прийомі при р =1,
n=12
,
 =
0°, в другому прийомі
при р = 2 ,
=
0°, в другому прийомі
при р = 2 ,
 =15°, у третьому прийомі
при р = 3,
=15°, у третьому прийомі
при р = 3,
 =
30° і т.д.
=
30° і т.д.
Контрольні вимірювання у польових умовах виконуються при гарній видимості візирних цілей. Візирні марки (цілі) повинні бути чіткими і знаходитися на різній висоті відносно приладу, щоб кут нахилу візирної осі при вимірюванні змінювався у межах 5 -15°.
Контрольні вимірювання зенітної віддалі виконують 6 прийомами в діапазоні ± 30°. Середню квадратичну похибку виміру вертикального кута визначають за формулою (1.13). Середнє арифметичне значення вертикального кута визначається за формулою
 ср
=
ср
= , (1.16)
, (1.16)
де відхилення
від середнього =
ср-
=
ср-
 .
(1.17)
.
(1.17)
Окремі значення кута нахилу обчислюють за формулами
і
= i
, (1.18)
i
, (1.18)
і
= .
(1.19) Тут П, Л – результати
відлічування по вертикальному кругу
при крузі право і крузі ліво відповідно,
i
- значення зенітної
віддалі.
.
(1.19) Тут П, Л – результати
відлічування по вертикальному кругу
при крузі право і крузі ліво відповідно,
i
- значення зенітної
віддалі.
Середню квадратичну похибку виміру горизонтального і вертикального кута обчислюють з точністю до 0,1″ і округлюють до 0.5″.
1.9. Приклад виміру напрямків і кутів способом кругових прийомів.
Цей спосіб застосовується при будуванні мереж згущення, Він дозволяє обчислювати будь-який кут між пунктами, які спостерігаються, як різницю виміряних напрямків.
Порядок виконання вимірювань наступний:
1. Теодоліт встановлюємо над точкою К (Костюк) (рис. 1.12 ) у прямовисне положення і центруємо його.
2. Вимірювання починаємо при крузі ліво (КЛ), при цьому початковий відлік на горизонтальному крузі встановлюємо 2 -5′.
3. Закріплюємо алідаду з лімбом і,відкріпивши лімб, наводимо зорову трубу на початковий пункт О(Основний), потім закріплюємо лімб (круг) і беремо початковий відлік.
За початковий пункт приймається добре видимий пункт серед інших, які треба спостерігати.
Бажано також вибирати самий лівий пункт, щоб всі виміряні кути були розташовані праворуч від початкового напрямку.
4. Залишаючи круг (лімб) закріпленим, відкріпляємо алідаду і, повертаючи її за ходом годинникової стрілки, наводимо зорову трубу послідовно на всі інші пункти Л (Лісний), Ф (Ферма) і потім знову візуємо на початковий пункт О, тобто замикаємо таким чином вимірювання за горизонт.
При візуванні на пункті кожного разу відлічуємо по горизонтальному кругу відліки і записуємо їх у журнал 1.
Вказаний комплекс вимірів складає перший пивприйом .

 О
(Основний)
О
(Основний)
 К
(Костюк)
К
(Костюк)

 Л
(Лісний)
Л
(Лісний)
Ф (Ферма )
Рис.1.12 Схема напрямків.
5. Другий пивприйом при крузі право (КП) починаємо з переведення зорової труби через зеніт і наведення її на початковий пункт О. Беремо відлік. При цьому круг (лімб) залишається нерухомим.
6. Далі візуємо послідовно, але у зворотному порядку, на всі інши пункти Ф, Л і знову на початковий пункт О, кожного разу записуємо відліки по горизонтальному кругу.
У другому півприйомі алідаду завжди обертають тільки проти ходу годинникової стрілки. Запис результатів відлічування у другому напівприйому ведемо у журналі 1 у зворотному порядку, тобто знизу уверх.
7. Друге наведення на початковий пункт О (Основний), тобто замикання за горизонт, є контролем нерухомості горизонтального круга (лімба) в пивприйомі.
Різниця між відліками на цей пункт на початку і при кінці півприйому називається ” незамикання горизонту” і воно не повинно збільшувати 0,2′ для теодоліта типу Т5.
При більший різниці увесь пивприйом повторюють знову.
Спостереження при крузі ліво (КЛ) і крузі право (КП) складають один прийом.
8. Для підвищення точності та контролю спостережень, а також при дослідженні виконують декілька прийомів, між якими повертають горизонтальний круг на кут, який дорівнює
φ = 180°/n, (1.20)
де n – число прийомів. Якщо n =3, φ = 60°, то початкове установлення у другому прийомі складає 60°, а в третьому - 120°.
9. При обчисленні напрямків вводять поправку за замикання горизонту, яку обчислюють за формулою
 (1.21)
(1.21)
де ∆
ср
- середнє значення не замикання горизонту
у пів прийомі,
к –
номер напрямку, причому початковий
напрямок приймають першим,
 -
число
напрямків у прийомі.
-
число
напрямків у прийомі.
10. Для порівняння результатів вимірювань з різних прийомів на один і той же самий пункт, в кожному прийомі приводять виміряні напрямки до початкового, який дорівнює нулю. Для цього з усіх виміряних напрямків віднімають середнє значення першого напрямку на початковий пункт. Різниця між однойменними напрямками в окремих прийомах, які приведені до загального нуля, не повинна перевищувати 0,2′ для теодолітів типу Т5.
11. Оцінку точності вимірювання виконують за відхиленнями - окремих напрямків від середнього арифметичного значення. Середню квадратичну похибку μ із одного прийому обчислюють за формулою
μ
= к
 ,
(1.21)
,
(1.21)
а середню квадратичну похибку напрямку, що виміряні р – прийомами М за формулою
М
=
 , (1.22)
де
, (1.22)
де
 відхилення
напрямків з окремих прийомів від
середнього арифметичного значення,
відхилення
напрямків з окремих прийомів від
середнього арифметичного значення,
 -
число напрямків у
прийомі,
-
число напрямків у
прийомі,
к
= 1,25 /
 . (1.23)
12.
. (1.23)
12.
Приклад вимірювання на п. Костюк,запису результатів і виконання контролю отриманих результатів наведено у журналі 1.
Приклад обчислення кутів з оцінкою точності вимірювань наведено у журналі 2. .
Журнал 1. Погода ясна. Вітер слабкий. Видимість 3 км. Дата 12.07.2011. Час 7 год. 30 хв. Зображення спокійне.
№пп. |
Назва напрямку |
Круг |
Відлік |
Колімація |
Виміряний напрямок |
|
|
Середнє = 0,5 × (л + п +180) |
Приведене до початкового |
|
|||||
|
|
|
|||||
1 |
Основний |
л п |
0° 02,9′ 180 03,2 |
0,2′ |
0° 03,′00 |
0° 00,′00 |
|
|
Лісний |
л п |
261 20,5 81 20,7 |
0,2′ |
+ 0,03 261 20,60 |
261 17,63 |
|
Ферма |
л п |
282 41,7 102 41,7 |
0 |
+ 0,07 282 41,55 |
282 38,62 |
|
|
Основний |
л п |
0° 02,8 180 03,2′ |
0,2′ |
+ 0,10 0° 02,′90 |
0° 00,′00 |
|
|
Не замикання |
|
∆л = - 0,1′; ∆п = - 0,1′; ∆ ср = - 0,′1. |
|
||||
2 |
Основний |
л п |
60° 03,4′ 240 03,6 |
0,2′ |
60° 03,′50 |
0° 00,′00 |
|
Лісний |
л п |
321 21,2 141 21,3 |
0,1′ |
- 0,03 321 21,25 |
261 17,72 |
|
|
Ферма |
л п |
342 42,2 162 42,4 |
0,2′ |
- 0,07 342 42,30 |
282 38,73 |
|
|
Основний |
л п |
60° 03,5 240 03,7′ |
0,2′ |
- 0,10 60° 03,′60 |
0° 00,′00 |
|
|
Не замикання |
|
∆л = + 0,1′; ∆п = + 0,1′; ∆ ср = + 0,1′. |
|||||
3 |
Основний |
л п |
120° 04,2′ 300 04,4 |
0,2′ |
0° 03,′00 |
0° 00,′00 |
|
Лісний |
л п |
21 22,0 81 20,7 |
0,2′ |
+ 0,03 261 20,60 |
261 17,81 |
||
Ферма |
л п |
42 42,9 222 43,0 |
0,1′ |
+ 0,07 282 41,55 |
282 38,68 |
||
Основний |
л п |
120° 04,1 300 04,4′ |
0,3′ |
+ 0,10 0° 02,′90 |
0° 00,′00 |
||
Не замикання |
|
∆л = - 0,1′; ∆п = 0; ∆ ср = - 0,05′. |
|||||
Журнал 2 . Обчислення кутів і оцінка точності.
Номер прийому |
Назва пунктів |
|
|||||||
Лісний |
v |
Ферма |
v |
||||||
° |
′ |
″ |
″ |
° |
′ |
″ |
″ |
||
1 |
261 |
17 |
38 |
+5 |
282 |
38 |
38 |
+3 |
|
2 |
|
|
43 |
0 |
|
|
43 |
-2 |
|
3 |
|
|
49 |
-6 |
|
|
41 |
0 |
|
|
261 |
17 |
43 |
-1 |
282 |
38 |
41 |
+1 |
|
Συ (+) Συ (-) |
|
|
|
+5 -6 |
|
|
|
+3 - 2 |
|
Σ|υ|
=16″; К = 1,25/
 = 0,51;
= 0,51;
μ =
0,51
 = 2,7″; М = 2,7 /
= 2,7″; М = 2,7 / = 1,5″.
= 1,5″.
1.10. Порядок виконання лабораторної роботи .
1. Вивчити будову теодоліта 3Т2КП і виконати ксерокопії рисунків його конструкції та оптичної системи (рис.1.10 і 1.11).
На рисунках виділити його основні частини:
об`єктив, кремальєру, сітку ниток, окуляр зорової труби, окуляр і об`єктив відлікового мікроскопа, рухомі і нерухомі клини, горизонтальний і вертикальний круги, закріпляючі і наводячи гвинти, горизонтальну і вертикальну осі, сферичний і циліндричний рівні, окуляр і об`єктив центрира. 2. Зарисуйте сітку ниток поля зору відлікового мікроскопа а також безпомилково знятий відлік по горизонтальному і вертикальному кругу.
3. Наведіть технічні характеристики теодоліта 3Т2КП у вигляді таблиці.
4. Виконайте вимірювання горизонтального кута 6 прийомами з перестановкою лімба через 30°, починаючі з 0° , а також вертикального кута 6 прийомами.
Запис результатів вимірювань виконайте згідно наведеному у п. 12 - прикладі запису – Журнали 1 і 2.
5. Виконайте обчислення середнього значення , середні квадратичні похибки як окремого вимірювання горизонтального і вертикального кутів, так і середніх значень кутів. 6. Дайте висновок, які похибки перебільшено впливають на результат виміру горизонтального і вертикального кута.
1.11. Контрольні запитання.
1. Який хід променів у відлікової оптичної системи теодоліта 3Т2КП? 2. Які основні оптичні деталі, їх види та призначення?
3. Що називають телескопічною системою, її особливості?
4. Який порядок відлічування по лімбу теодоліта 3Т2КП?
5). Яке призначення теодоліта 3Т2КП , його особливості?
Лабораторна робота № 2.
Вивчення конструкції і основних оптичних характеристик зорової труби теодоліта 3Т2КП .
Мета роботи: Вивчити конструктивні особливості зорової труби теодоліта 3Т2КП та визначити її основні оптичні характеристики: поля зору, якості зображення в трубі різних предметів, збільшення труби, коефіцієнта ниткового далекоміру тощо.
2.1.Основні метрологічні відомості.
Сучасні зорові труби є складними оптико - механічними пристроями і містять об`єктив, окуляр, сітку ниток, кремальєру (рис.2.1). Вони будують пряме або обернене збільшене зображення. В зорових трубах з прямим зображенням між окуляром і кремальєрою розташована система призм Аббе 6, яка разом з окуляром формує пряме зображення (Рис.2.2). Для спрямування зорової труби на точку візування на ній має бути візирна вісь, положення якої задається двома точками і повинна на час візування лишатися незмінною. Візирна вісь - уявна пряма, що проходить через задню головну точку об`єктива і центр перехрестя сітки ниток.
Перехрестя сітки ниток на фоні зображення об`єктива, на який наведена зорова труба, повинно бути виразним без паралаксу. Для цього сітка ниток повинна розташовуватися в тій площині, в якій об`єктив формує дійсне зображе- ння об`єкту.
2.1
2.2.

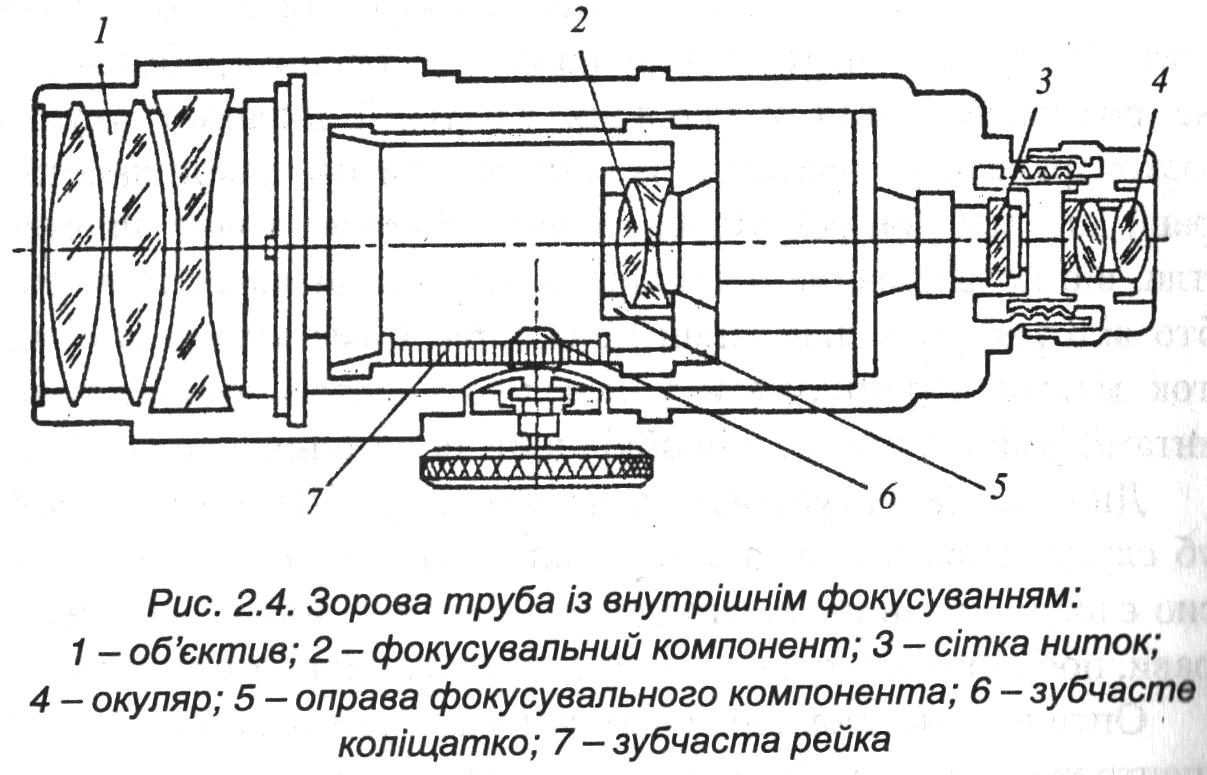
Вхідною зіницею слугує оправа переднього компонента об`єктива 2. Вихідною зіницею є дійсне зображення оправи, що побудоване окуляром поблизу свого заднього фокуса. Оптична вісь зорової труби бути ретельно і точно відцентрована . Центри кривини всіх сферичних поверхонь оптичної системи повинні міститися на одній прямій , яку називають оптичною віссю зорової труби . Крім цього існує геометрична вісь, що збігається з віссю симетрії оправ зорової труби. Всі три названі осі в зоровій трубі повинні збігатися. Фокусуючий компонент змінює еквівалентну фокусну віддаль оптичної системи так щоб дійсне зображення візирної цілі формувалося у передній фокусній площині окуляра 4 (рис2.3.) та в площині перехрестя сітки ниток . Лінзи фокусуючого компонента, які закріплені в оправі 5, пересувають уздовж оптичної осі зорової труби за допомогою зубчастої пари.

Рис. 2.3.
Ретельно шліфовані напрямні закріпляють у корпусі труби. Під час руху фокусуючого компонента оптична вісь його деталей у межах зазору може змінювати своє положення відносно оптичної осі зорової труби. Внаслідок цього під час руху фокусуючого компонента лінія візування може не збігатися з оптичною віссю (рис. 2.3). Це негативне явище треба врахувати під час візування на невеликих віддалях, коли фокусуючий компонент переміщається на значну величину.
Тому, при спостереженнях під час виконання високоточних геодезичних вимірювань зміна фокусування зорової труби небажана.
Об`єктив – най важливий оптичний вузол (рис.2.3). Він будує зображення візирної цілі у задній фокусній площині і визначає його якість.
Основними характеристиками об`єктива є фокусна віддаль f ′, відносний отвір Д/ f (де Д – діаметр вхідної зіниці); кут поля зору і роздільна здатність. Фокусна віддаль різних об`єктивів має інтервал від f = 100….500 мм, відносний отвір має межи від 0,2 -0,1, тобто через об`єктив проходять широкі пучки променів або паралельних до оптичної осі або під малим кутом до неї.
Поле зору об`єктива має 1 - 2°. Тому в зорових трубах необхідно виправляти передовсім сферичну та поздовжню хроматичну аберацію і кому. В зорових трубах сучасних теодолітів для цього застосовують п’яти лінзові або чотири лінзові об`єктиви ( рис. 2.4,г).
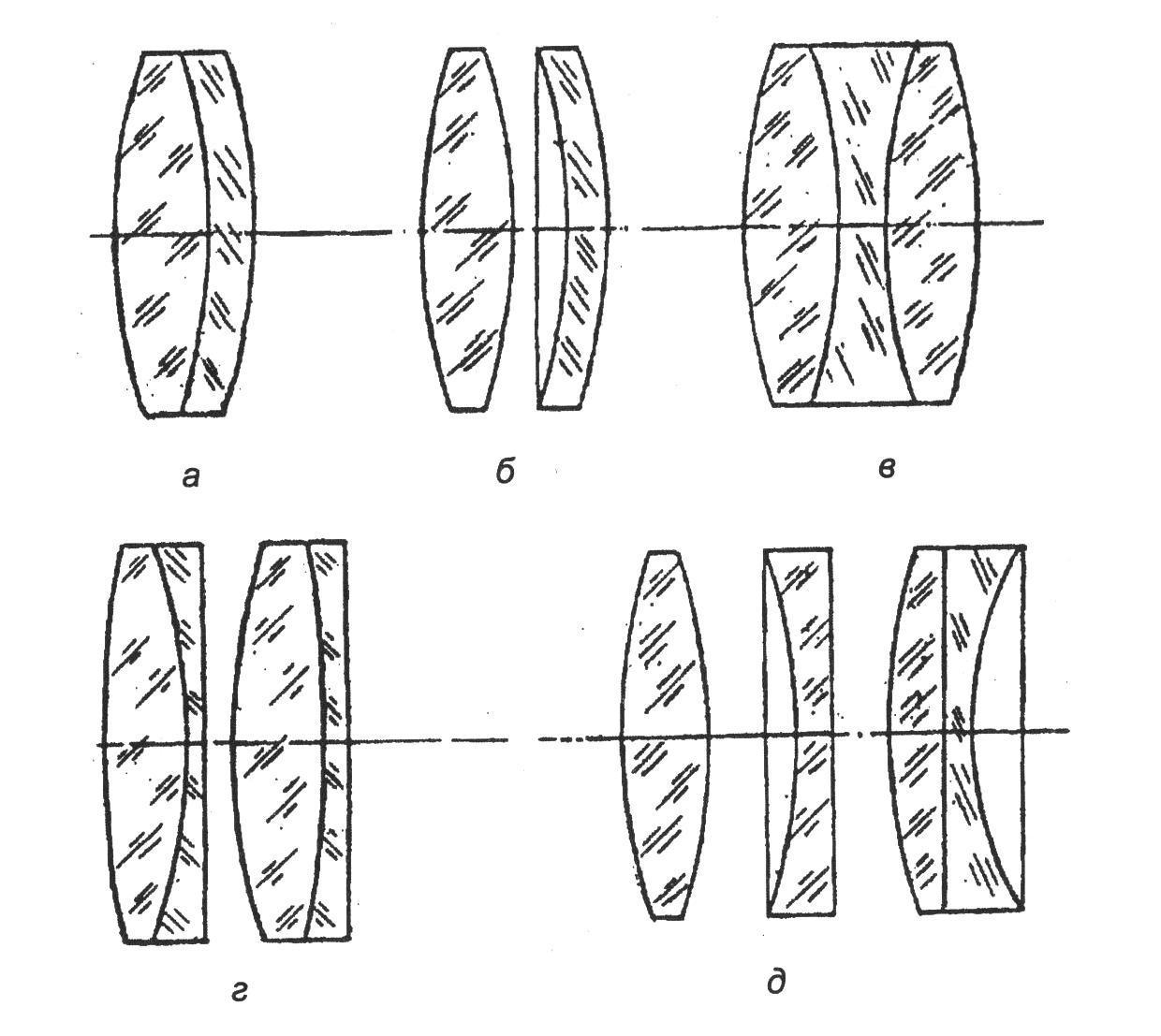 Рис.
2.4. Об`єктиви зорових труб: а –
двох лінзовий у теодолітів типу Т30, б
– двох лінзовий з повітряним зазором,
в – три лінзовий , г –у теодолітів , д
–у теодолітів типу 2Т2.
Рис.
2.4. Об`єктиви зорових труб: а –
двох лінзовий у теодолітів типу Т30, б
– двох лінзовий з повітряним зазором,
в – три лінзовий , г –у теодолітів , д
–у теодолітів типу 2Т2.
Окуляр
– це оптична система
призм, через яку розглядують зображення
візирної цілі, що утворив об`єктив.
Основні характеристики окуляра: фокусна
віддаль f
′ок
, відносний отвір
Д′ / f ′ок
(де Д′ - діаметр
вихідної зіниці),
поле зору окуляра.
Для f ′ок
приймають значення
від 10 до 40 мм (через 5 мм) і 50 мм. Кут поля
зору окуляру складає 40 - 60°.
 Рис.2.5.
Окуляри зорових труб : а- Рамсдена, б
– Кельнера, в – симетричний, г –
отоскопічний, д – у теодолітів типу
3Т2, е – у теодолітів типу 2Т2.
Рис.2.5.
Окуляри зорових труб : а- Рамсдена, б
– Кельнера, в – симетричний, г –
отоскопічний, д – у теодолітів типу
3Т2, е – у теодолітів типу 2Т2.
Оскільки кут поля зору окуляра у десятки разів більший від кута поля зору об`єктива, то промені, що йдуть до окуляра, виходять за межи параксіальної області(рис.2.6). Тому велику увагу приділяють виправленню недоліків зображень окулярів. Окуляри є складною оптичною системою, яка містить дві частини: польову лінзу або колектив – П і очну лінзу (колектив) – О. Польова лінза, яку розташовують поблизу сітки ниток, слугує для звуження пучків променів, що йдуть від об`єктива . В теодоліті 3Т2КП подано три - лінзовий окуляр, який добре виправляє сферичну і хроматичну аберацію, його і застосовують в зорових трубах, що мають велике збільшення.
Основними
оптичними характеристиками зорових
труб є збільшення Г,
кут поля зору та її
роздільна здатність.
Збільшення
зорової труби показує,
в о скільки разів збільшуються видимі
розміри предмету, якщо його розглядають
через зорову трубу, порівняно із
розмірами того самого предмету, видимого
неозброєним оком (рис.2.6) .
Рис.2.6. Побудова збільшеного зображення цілі зоровою трубою.
 Рис.2.7.
Збільшення
зорової
труби .
Рис.2.7.
Збільшення
зорової
труби .
Збільшення обчислюють за формулою (рис. 2.7)
Г
=
 ≈
≈
 . (2.1)
. (2.1)
де
 кут,
під яким видно зображення предмету в
зоровій трубі;
кут,
під яким видно зображення предмету в
зоровій трубі;
 -
кут під яким видно предмет із середині
вхідної зіниці. Так, як
-
кут під яким видно предмет із середині
вхідної зіниці. Так, як
 =
=
 ,
,
 ,
то
,
то
Г
=
=
 . (2.2)
Враховуючі, що діаметр
вхідної зіниці – Д вх.
відноситься до
діаметра вихідної зіниці – Д вих.
як фокусні віддалі
об`єктива і окуляра, то збільшення
дорівнює
. (2.2)
Враховуючі, що діаметр
вхідної зіниці – Д вх.
відноситься до
діаметра вихідної зіниці – Д вих.
як фокусні віддалі
об`єктива і окуляра, то збільшення
дорівнює
Г =
=
=
 . (2.3)
Поле зору зорової труби
– це обмежений конусною поверхнею
простір, який оглядають через зорову
трубу,
. (2.3)
Поле зору зорової труби
– це обмежений конусною поверхнею
простір, який оглядають через зорову
трубу,
установлену на нескінченість (рис. 2.8).
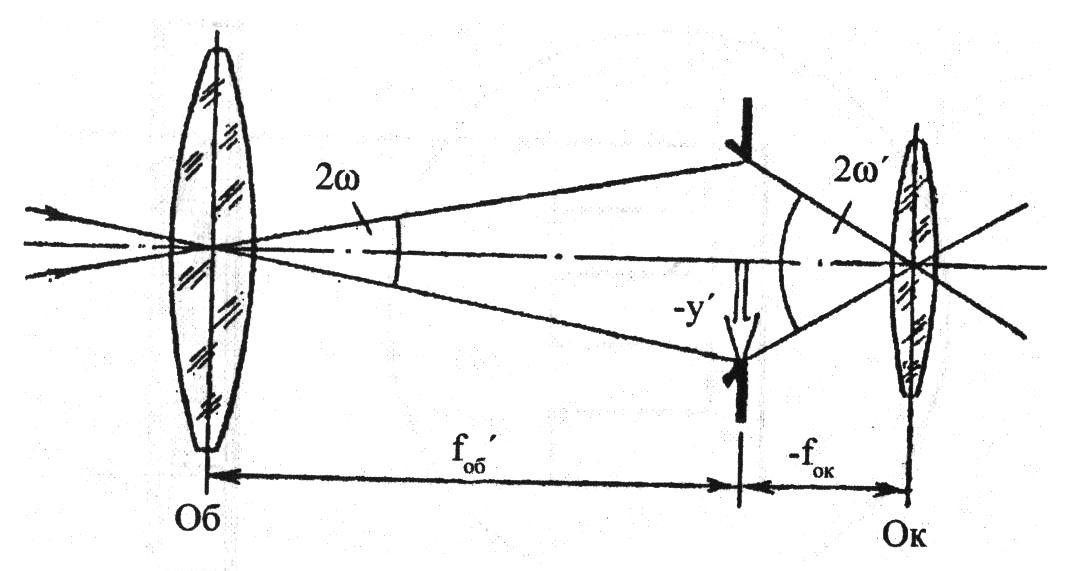
Рис.2.8. Поле зору в зоровій трубі .
Для того, щоб визначити величину дійсного поля зору, її треба навести на віддалену ціль і сумістити з нею один, а потім другий край поля зору діафрагми. Суміщаючи, відлічують по горизонтальному або вертикальному кругу, залежно від того повертають горизонтальний круг, або вертикальний відповідно. Різниця протилежних від ліків дає кут поля зору.
Роздільна
здатність зорової труби
– це можливість давати окреме зображення
кожної з двох сусідніх точок предмету.
Вона характеризується найменшим кутом
r ,
під яким дві сусідні
точки ще видні, як кожну окремо. Роздільна
здатність неозброєного ока, що
приймається кутом r,
дорівнює 60″. Тоді роздільна здатність
зорової труби дорівнює r
=
 , (2.4)
де
, (2.4)
де
 Щоб
око не втомлювалося,
Щоб
око не втомлювалося,
 приймають в 1,5 – 2 рази більшим від
номінального збільшення
приймають в 1,5 – 2 рази більшим від
номінального збільшення
 Таке збільшення називають корисним,
тобто
Таке збільшення називають корисним,
тобто
 =
2
=
2 і
і
 .
(2.5)
.
(2.5)
Для визначення роздільної здатності зорової труби застосовують спеціальну таблицю з однаковою шириною чорних і білих смужок . Цю таблицю встановлюють на певній віддалі від труби. Роздільна здатність зорової труби визначається із залежністю:
r =
 (2.6)
(2.6)
де а
– відстань між білими і чорними смужками,
яку ще можна розрізняти. Її вказують
у спеціальній таблиці;
 віддаль
від теодоліта до цієї таблиці.
віддаль
від теодоліта до цієї таблиці.
2.2. Приклади визначення оптичних характеристик зорової труби.
2.2.1. Визначення якості зображення труби.
Зорова труба повинна давати чіткі, достатньо яскраві, не пофарбовані і подібні зображення предметів при їх розглядувані. Якість зображення оцінюють при розглядувані правильних геометричних фігур (трикутника, кола, квадрата, інших), які накреслені на білому папері і зафарбовані чорною тушшю.
Зображення повинні бути подібними, виразними, пофарбованими у чорному кольору і тільки по краях зображень помітний легкий блакитно – фіолетовий відтінок, що вказує на відсутність хроматичної і сферичної аберації.
2.2.2. Визначення кута поля зору труби.
Існують два способи визначення: перший - за допомогою горизонтального і вертикального круга теодоліта, другий – за допомогою нівелірної рейки.
У першому
способі встановлюємо
теодоліт і приводимо його у робоче
положення. Наводимо трубу на віддалений
чіткий предмет правим або нижнім краєм
діафрагми поля зору і робимо відлік
 по лімбу.
по лімбу.
Потім
повертаємо трубу із алідадою і наводимо
на той самий предмет лівим або верхнім
краєм діафрагми і знову беремо відлік
з лімбу .
Кут поля зору
– 2W
знаходимо за формулою
.
Кут поля зору
– 2W
знаходимо за формулою
2W
=
 ,
(2.7)
,
(2.7)
де –
відлікові по лімбу
горизонтального круга (при визначенні
кута по горизонту) і по лімбу вертикальному
кругу (при визначенні кута по прямовисній
лінії ) .
–
відлікові по лімбу
горизонтального круга (при визначенні
кута по горизонту) і по лімбу вертикальному
кругу (при визначенні кута по прямовисній
лінії ) .
Наприклад, при наведенні правим краєм діафрагми на точку відлік по горизонтальному кругу дорівнює
= 211°43′, а лівим краєм = 210° 13′ .
Тоді кут поля зору дорівнює 2W = = 1° 30′.
У другому способі наводимо трубу вертикальною ниткою сітки на рейку, встановлену на 30 – 50 м від теодоліту і відлічуємо з точністю 1 см по верхньому – В і нижньому – Н краях діафрагми поля зору. Кут поля зору знаходять за формулою
2W
=
 ,
(2,8)
,
(2,8)
де
 - верхній і нижній
відліки по рейці, в см;
S – віддаль
від об`єктива зорової труби до рейки, в
см;
- верхній і нижній
відліки по рейці, в см;
S – віддаль
від об`єктива зорової труби до рейки, в
см;
 .
.
Приклад визначення кута 2W наведено в табл. 2. 1.
Таблиця 2.1.
-
№ визначення
Число поділок по рейці у полі зору труби (В -Н),см
Віддаль до рейки,

Кут поля зору 2W, град
1
53
2 000
1,5
2
79
3 000
1,5
Додатково кут поля зору знаходять приблизно за формулою
2W
≈
 ,
(2.9)
,
(2.9)
де Г – збільшення труби. Точність візування при цьому дорівнює
t =60″/ Г. (2.10)
2.2.3 Визначення збільшення зорової труби.
Збільшення зорової труби має важливу характеристику і визначається за формулою (рис.2.7)
Г = = = ,
де
 -
кут, під яким видно зображення в зоровій
трубі,
-
кут, під яким видно зображення в зоровій
трубі,
ω - кут, під яким видно той же предмет неозброєним оком,
 - фокусна віддаль еквівалентної
лінзи об`єктива,
- фокусна віддаль еквівалентної
лінзи об`єктива,
 окуляра,
окуляра,
 - діаметр вхідного отвору
об’єктива,
- діаметр вхідного отвору
об’єктива,
 - діаметр вихідної зіниці
труби.
- діаметр вихідної зіниці
труби.
Збільшення зорової труби визначають різними способами.
1 спосіб – за допомогою нівелірної рейки.
Для
цього встановлюємо теодоліт на штатив
і в 5 -7 м від нього нівелірну рейку.
Дивимося двома очами: одним безпосередньо
на рейку, другим в зорову трубу. Відмічаємо
, яке число поділок, що видимі неозброєним
оком проектуються на одну цілу поділку,
видиму в зорову трубу. Це число буде
відповідати збільшенню зорової труби
(рис. 2.9).
Для контролю
ці визначення повторюють два – три
рази. При другому визначенні порівнюють
число поділок рейки, якому відповідає
група з трьох поділок, а при третьому
визначенні – з п
 яти
поділок.
яти
поділок.
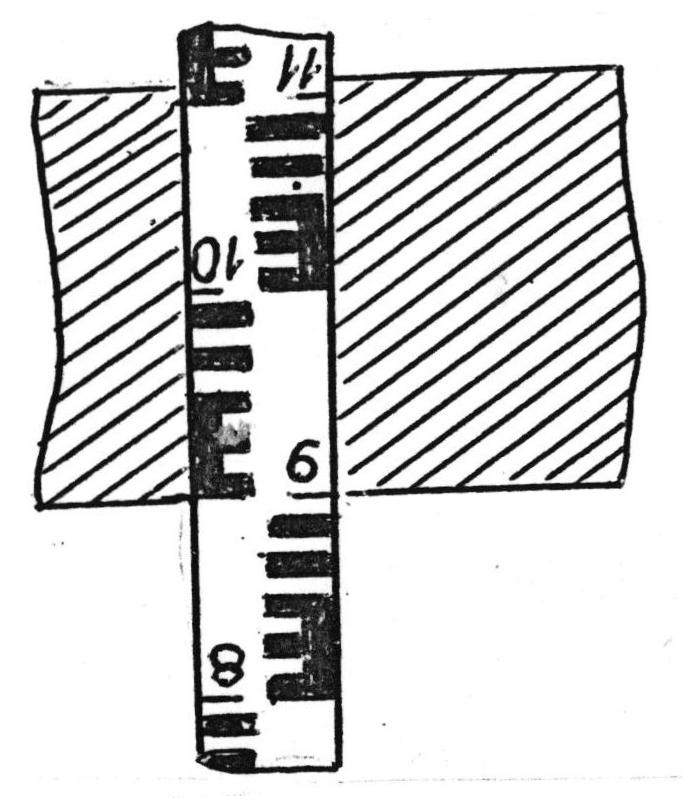
Рис.2.9.
Схема визначення збільшення зорової
труби (V
=
 ).
).
Результати визначення записують в табл..2.2.
Таблиця 2.2.
№ визначення |
Число поділок рейки, які спостерігають, см |
Збільшення
труби ,кратне(×)
Г =
|
|||
В трубі - n1 |
Без труби – n2 |
||||
1 |
1 |
24 |
24 |
||
2 |
3 |
76 |
25 |
||
3 |
5 |
123 |
25 |
||
 .
.
Середнє
 .
.
2 Спосіб
– через порівняння діаметрів зіниць
входу і виходу.
Зіницею
входу
 зорової труби є оправа об`єктива,
внутрішній діаметр якого вимірюють
циркулем і масштабною лінійкою з
точністю 0,2 мм.
зорової труби є оправа об`єктива,
внутрішній діаметр якого вимірюють
циркулем і масштабною лінійкою з
точністю 0,2 мм.
Для визначення діаметра зіниці виходу, трубу фокусують на нескінченність і направляють її об’єктивом на світлий фон.
За окуляром
встановлюють екран з кальки і повільно
переміщують його, добиваючись чіткого
зображення яскравого кола, яке є зіницею
виходу –
 .
.
Вимірюють
діаметр виходу
 з
точністю 0,1 мм циркулем і масштабною
лінійкою.
з
точністю 0,1 мм циркулем і масштабною
лінійкою.
Вимірюють
 два – три рази і записують в табл.
2.3.
два – три рази і записують в табл.
2.3.
Таблиця 2.3.
-
№ визначення
Діаметр зіниць, мм
Збільшення труби, кратне (×): Г = .
Вхідної -
Вихідної

1
36,0
1,50
24,0
2
36,0
1,46
24,7
3
36,0
1,44
24,8
Середнє 24,5×
3 Спосіб – через вимірювання фокусних віддалей об`єктива і
окуляра.
В цьому
способі вимірюють лінійкою фокусну
віддаль об`єктива і окуляра. Фокусна
віддаль об`єктива
 –
це віддаль від
об`єктива до виправних гвинтів сітки
ниток труби, фокусна віддаль окуляра
–
це віддаль від
об`єктива до виправних гвинтів сітки
ниток труби, фокусна віддаль окуляра -
це віддаль від окуляра до виправних
гвинтів сітки. Збільшення обчислюють
за формулою:
-
це віддаль від окуляра до виправних
гвинтів сітки. Збільшення обчислюють
за формулою:
Г=
 .
Вимірювання віддалей
і
виконують
два – три рази і обчислюють середнє
збільшення труби.
.
Вимірювання віддалей
і
виконують
два – три рази і обчислюють середнє
збільшення труби.
Запис результатів визначення збільшення ведеться в таблиці аналогічно другому способу.
2.2.4 Визначення кутової віддалі бісектора сітки ниток зорової труби.
Визначення кутової віддалі бісектора сітки ниток виконують по лінійці, яку нерухомо закріплюють горизонтально і приблизно перпендикулярно до візирної осі труби на віддалі 10 – 15 м від теодоліта. За положеннями ниток бі-сектора труби відносно лінійки відлічують і з точністю 0,2 – 0,3 мм. Кутову віддаль бісектора визначається за формулою
∆ =
 (
-
), (2.11)
де
і
(
-
), (2.11)
де
і
 відліки відповідно по лівій та правій
нитках бісектора на лінійці, мм;
відліки відповідно по лівій та правій
нитках бісектора на лінійці, мм;
 - віддаль від лінійки
до осі обертання теодоліта, м .
- віддаль від лінійки
до осі обертання теодоліта, м .
2.2.5. Визначення правильності руху фокусуючої лінзи зорової труби.
Для визначення правильності руху фокусуючої лінзи встановлюємо теодоліт на штатив і приводимо в робоче положення. Вибираємо віддалений чіткий предмет на висоті осі обертання візирної труби. Старанно наводимо візирну вісь труби на предмет і закріплюємо її. У створі та перпендикулярно до променя візування на віддалі приблизно 10 м закріплюємо нерухомо горизонтальну лінійку так, щоб вона находилась на висоті візирного променя. Без зміни положення труби, фіксуємо її по лінійці і робимо відлік по вертикальній нитці і лінійці з точністю 0.2– 0.5 мм. Переводимо трубу через зеніт і знову наводимо її на тої самий предмет, закріплюємо її і, змінюючи фокусування, робимо другий відлік по лінійці. Похибка руху фокусуючої лінзи – δ1 для віддалі 1 = 10 м обчислимо за формулою
δ
=
 ,
(2.12)
де
і
-
відлікові по лінійці
при крузі ліво (К Л) і крузі право (К П),
мм;
,
(2.12)
де
і
-
відлікові по лінійці
при крузі ліво (К Л) і крузі право (К П),
мм;
 – віддаль від лінійки
до осі обертання теодоліта, м.
Потім
послідовно збільшуємо віддаль
– віддаль від лінійки
до осі обертання теодоліта, м.
Потім
послідовно збільшуємо віддаль
 від теодоліта до
лінійки до 15, 20, 25 і 30 м і кожний раз
визначаємо значення δі
. За
отриманими значеннями
δі
будуємо графік
залежності відносно віддалі візування
до
лінійці , за
яким у майбутніх роботах визначимо
величину поправки.
від теодоліта до
лінійки до 15, 20, 25 і 30 м і кожний раз
визначаємо значення δі
. За
отриманими значеннями
δі
будуємо графік
залежності відносно віддалі візування
до
лінійці , за
яким у майбутніх роботах визначимо
величину поправки.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

15
10
5
0
5
10 15 20 25 30 35

Рис. 2.10. Графік змінювання похибки фокусування від віддалі візування .
2.2.6. Визначення постійної ниткового віддалеміра зорової труби.
Горизонтальне
прокладення лінії на
місцевості, що виміряне нитковим
віддалеміром визначається за формулою
= (100L + ∆)
 ,
(2,13)
,
(2,13)
де L
– різність від ліків по вертикальній
рейці між від -далемірними штрихами
сітки ниток, в см (рис. 2.4),
– кут нахилу візирного променя, ∆
- невідома поправка
за відхилення коефіцієнта віддалеміра
від 100.
Методика
визначення постійної віддалеміра ∆
наступна. На рівній
місцевості вибирають базис довжиною
120 –160 м і поділяють його на 6 – 8
інтервалів, кратних довжині мірної
стрічки або рулетки.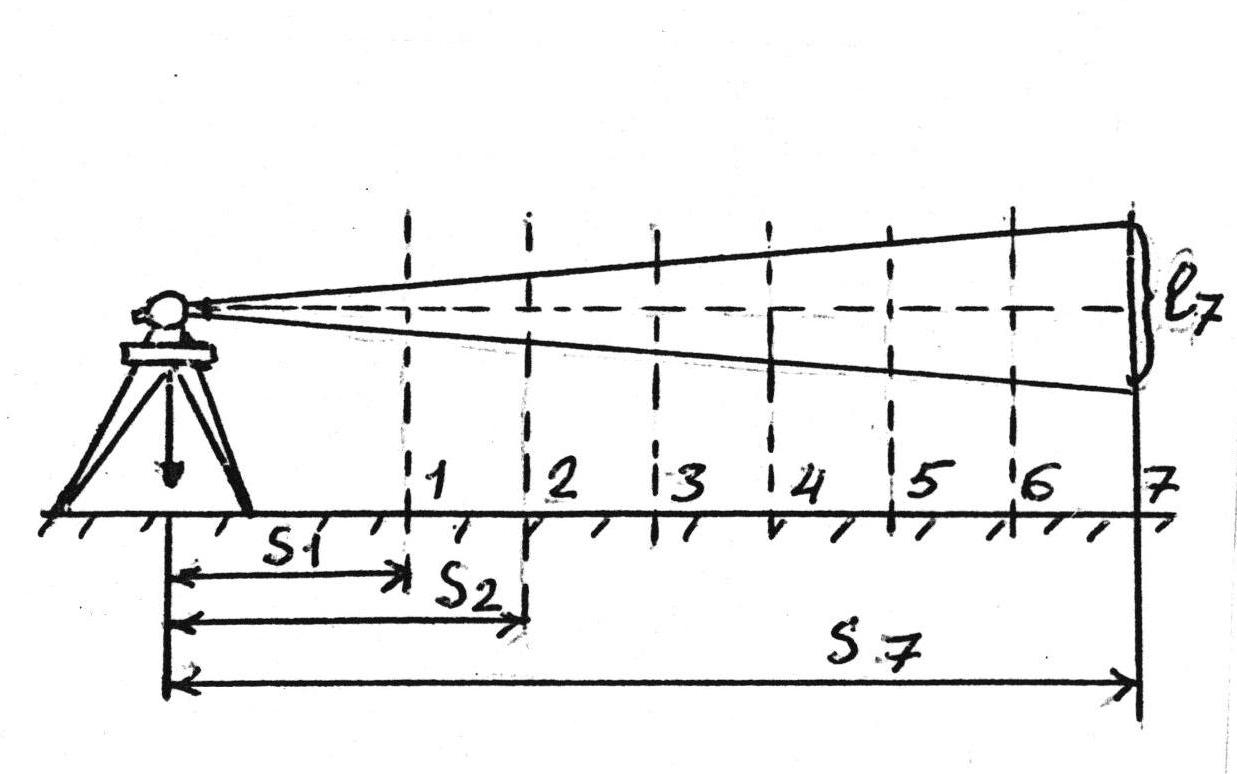 Рис.
2.11
.
Схема визначення постійної ниткового
віддалеміра.
Рис.
2.11
.
Схема визначення постійної ниткового
віддалеміра.
Кожен інтервал базису вимірюють стрічкою з відносною похибкою не менш 1 : 1500.
На одному кінці базису (рис.2.11) встановлюємо теодоліт, а рейку встановлюємо прямовисно і послідовно на всіх точках.
Візуємо на рейку з таким рахунком, щоб кут нахилу візирної осі був близько до 0° з відхиленням не більш 20′.
Тоді горизонтальне прокладення буде дорівнювати
= 100L + ∆ і звідки ∆ = - 100L. (2.14)
Для визначення поправки ∆ довжину кожного інтервалу вимірюють по рейці чотирма прийомами, а результати записують в табл.2.5.
Результати визначення поправки ∆. Таблиця 2.5.
№ інтервалу |
Довжина інтервалу |
Інтервал, що виміряний нитковим від далекоміром |
100× Lср, м |
∆ср, м |
|||
прямо |
зворотно |
||||||
чорна |
червона |
чорна |
червона |
||||
1 2 3 4 5 6 |
20,02 40,01 59,98 80,02 100,00 120,02 |
20,0 40,0 59,9 80,0 99,8 119,9 |
20,0 40,0 59,8 80,0 99,8 119,9 |
19,9 40,0 59,8 79,9 99,8 119,9 |
20,0 40,0 59,9 80,0 99,8 119,9 |
19,96 40,00 59,85 79,97 99,80 119,9 |
+0,06 +0,01 +0,13 +0,05 +0,20 +0,12 |
|
|||||||
∆ ср, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
∆ = 0,12 |
||||




0,3
0,2
0,1
0
0 20 40 60 80 100 120
Рис. 2.12. Графік змінювання поправки ∆ від віддалі .
Середні різниці ∆ср. наносять на графік (рис.2.12), у залежності від віддалі . Отримані точки з`єднають прямими лініями і потім проводять осередню лінію за умовою, що сума площ відхилень від середньої лінії повинна бути мінімальною, а осередня лінія повинна проходити через початок координат.
Збудований графік використовують для визначення поправки ∆ на різних віддалях і введення її у віддалі , які вимірюють нитковим віддалеміром теодоліта. Наприклад, якщо = 87 м, то поправка до виміряної віддалі склала ∆ = 0,12 м.
2.3. Порядок виконання лабораторної роботи.
1. Накреслити зорову трубу теодоліта 3Т2КП (або зробіть ксерокопію ) і виділити основні її модулі: об`єктив, окуляр, фокусуючий елемент, сітку ниток, систему призм Аббе, візирну вісь труби. 2. Виконайте опис основних особливостей окремих модулів зорової труби. 3. Проконтролюйте якість зображення зорової труби. 4. Визначите кути поля зору труби згідно прикладу 2.2. 5. Визначите збільшення труби згідно прикладу 2.3. 6. Визначите кутову віддаль бісектора сітки ниток труби згідно прикладу 2.4. 7. Визначите правильність руху фокусуючого елемента труби згідно прикладу 2.5. 8. Визначите поправку ∆ ниткового віддалеміра труби згідно прикладу 2.6. 9.Дайте висновок про стан зорової труби теодоліта.
2.4. Контрольні запитання.
1. Назвіть, які осі має зорова труба теодоліта?
2. Перелічите особливості об`єктива і окуляра труби?
3. За якими формулами визначають збільшення зорової труби?
4. Що являє собою поле зору труби?
5. Що таке роздільна здатність зорової труби?
6. Як вимірюють фокусну віддаль об`єктива і окуляра?
7. Як вимірюють діаметр вхідного отвору об`єктива і вихідної зіниці зорової труби?
Лабораторна робота № 3.
Вивчення конструкції і основних метрологічних характеристик відлікової системи теодоліта 3Т2КП . Мета роботи : Вивчити конструктивні особливості відлікової системи теодоліта 3Т2КП і визначити основні метрологічні характеристики двостороннього оптичного мікрометра.
3.1.Основні відомості.
Для підвищення точності відлічування в теодоліті 3Т2КП застосовується двосторонній оптичний мікрометр, який дозволяє уникати вплив ексцентриситету алідади і круга на точність вимірювання.
На схемі двостороннього оптичного мікрометра з рухомими оптичними клинами (рис.3.1): 1 – круг, 2 – зображення круга, 3 - об`єктив, 4,5 – нерухомі клини, 6,7 – рухомі клини, 8 – шкала оптичного мікрометра;
 Рис.3.1.
Схема дії двостороннього оптичного
мікрометра з рухомими оптичними
клинами.
Рис.3.1.
Схема дії двостороннього оптичного
мікрометра з рухомими оптичними
клинами.
а – клини прилягають одні до одних , шкала мікрометра має нульовий відлік, штрихи круга і його зображення не збігаються; б - рухомі клини відсунуті, шкала мікрометра має відлік, внаслідок пересування клинів штрихи круга і зображення його суміщені.
Нижня пара клинів 4 і 5 нерухома. Вони будують зображення діаметрально протилежних ділянок шкали круга точно посередині поля зору відлікового пристрою.
Верхня пара клинів 6 і 7 відповідно рухома – скріплена із шкалою мікрометра 8. Її приводять у рух зубчаста пара і рухається вона разом із шкалою мікрометра.
У результаті плоско паралельного переміщення рухомої пари клинів є можливість сумістити діаметрально протилежні штрихи шкали круга, а за шкалою мікрометра відлічити необхідне для цього переміщення клинів.
На
рис.3.1,а положення клинів відповідає
нульовому відліку шкали мікрометра.
Зображення штрихів
 і
В діаметрально протилежних ділянок
круга у полі зору мікроскопа не збігаються.
і
В діаметрально протилежних ділянок
круга у полі зору мікроскопа не збігаються.
Під час обертання маховичка оптичного мікрометра, що є співвісним зі зубчастим коліщатком, зубчаста рейка , а разом з нею шкала мікрометра і пара рухомих клинів рухаються, у результаті чого зображення штрихів діаметрально протилежних ділянок шкали круга і В суміщаються (рис. 3.1,б).
За індексом j відлічують шкалу мікрометра. Відлік мікрометра відповідає величині переміщення штрихів круга для суміщення їх у кутовій мірі.
На рис 3.2 і 3.3 подано принципову оптичну схему двостороннього оптичного мікрометра теодоліта з оптичними клинами. Рис.3.2 ілюструє хід променів через обидва круги теодоліта.
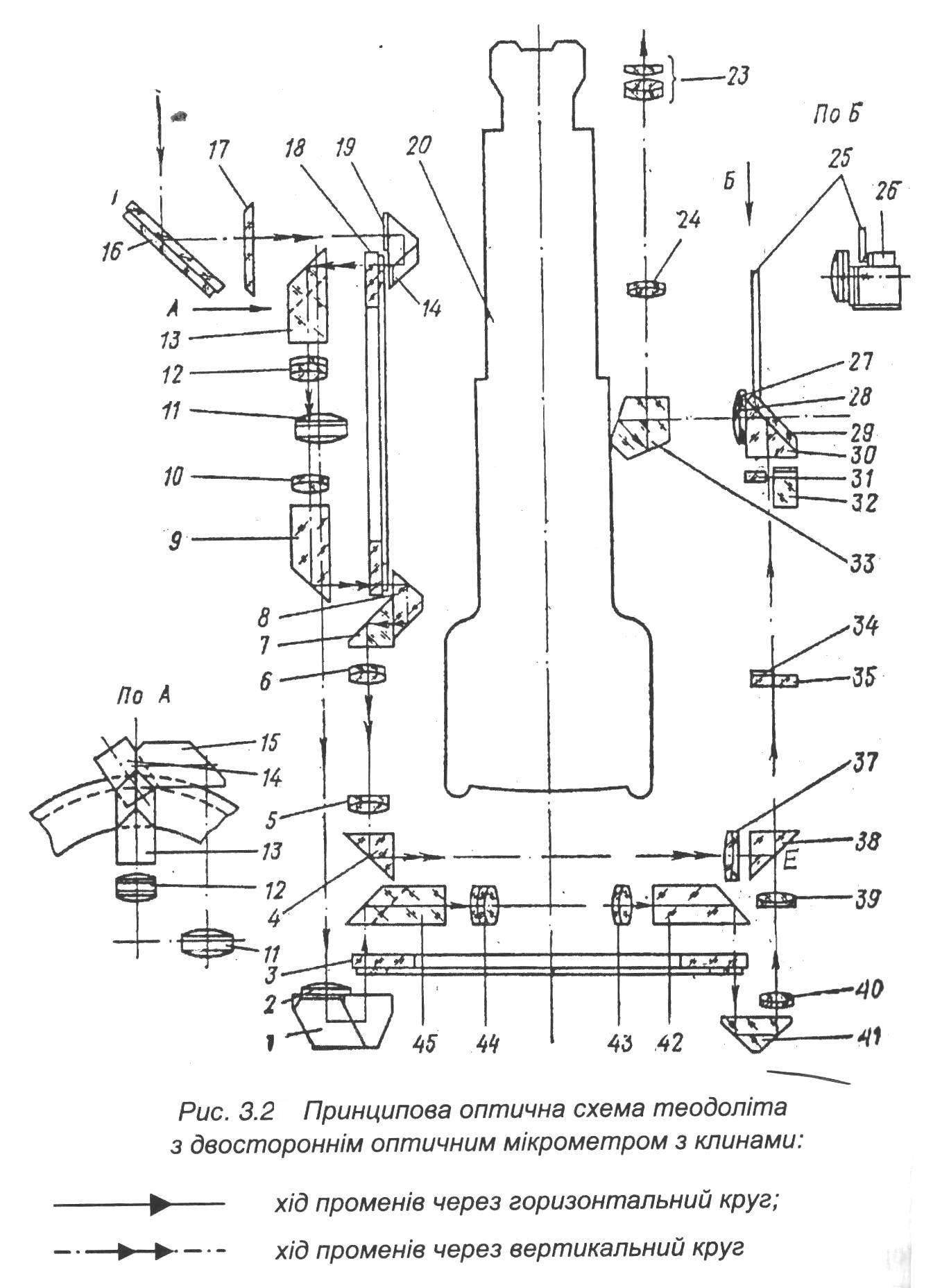 На рис.3.2 позначено:
На рис.3.2 позначено:
1 і 15 – призми освітлювальної системи горизонтального круга; 2 і 11 – лінзи тієї самої системи.; 3 – горизонтальний круг; 4 , 7, 8 і 38 – призми системи вертикального круга; 5 ,6 і 37 – лінзи об`єктива мікроскопа системи вертикального круга; 9 і 13 – призми системи передач зображення діаметрально протилежної ділянки вертикального круга; 10 і 12 – лінзи об`єктива тієї самий системи ; 14 – призми освітлювальної системи вертикального круга; 16 – зовнішнє поворотне дзеркало; 17 - захисне скло; 18 - вертикальний круг; 19 – світло – фільтр освітлювальної системи вертикального круга; 20 – зорова труба; 23 – окуляр відлікового мікроскопа; 24- об`єктив відлікового мікроскопа; 25–шкала мікрометра; 26 – призма підсвічування шкали мікрометра; 27 – лінза колектив; 28– діафрагма поля зору мікроскопу; 29- клинова платівка розподільного блока; 30 – призма розподільного блока; 31 і 32 – рухомі клини мікрометра; 33 – пента - призма відлікового мікроскопа; 34 і 35 – нерухомі клини мікрометра; 39 і 40 – лінзи об`єктива мікроскопа системи горизонтального круга; 41 – призма тієї самий системи; 42 і 45 – призми системи передавання зображення діаметрально протилежної ділянки горизонтального круга; 43 і 44 – лінзи об`єктива тієї самий системи.
Промені йдуть через діаметрально протилежні частини шкал горизонтального і вертикального круга різними шляхами, але мають спільну ділянку від точки Е (призма 38) до окуляра 23 відлікового мікроскопа.
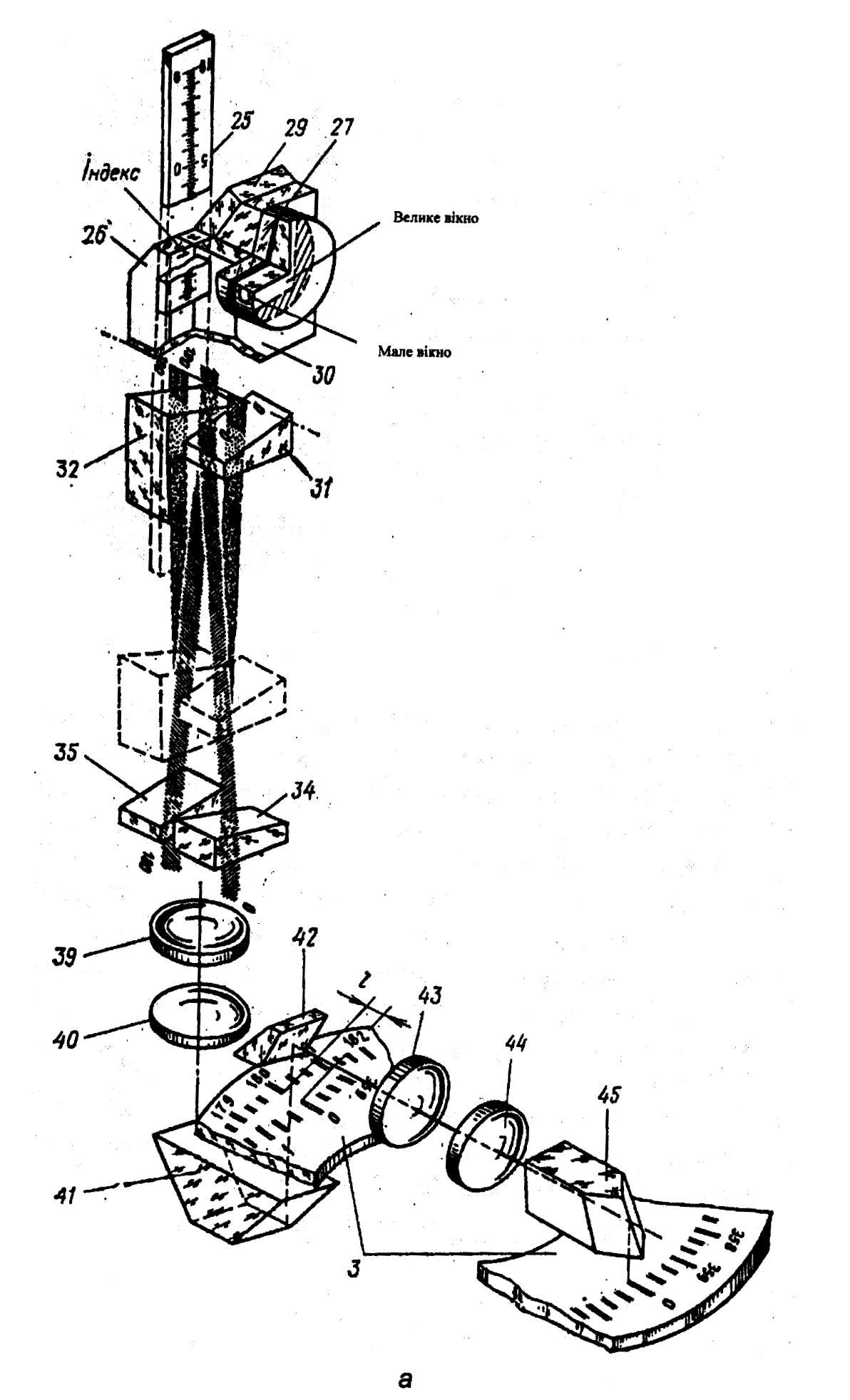 Рис.
3.3, а. Оптична схема мікрометра з
клинами.
Рис.
3.3, а. Оптична схема мікрометра з
клинами.
Рис. 3.3, а – хід променів в оптичної системі мікрометра з рухомими клинами . Позначення : 3 – горизонтальний круг; 25 – шкала мікрометра; 26 – призма підсвічування шкали мікрометра; 27 – лінза колектив; 29 ,30– клинова платівка та призма розподільного блока; 31,32 – рухомі клини мікрометра; 34,35 – нерухомі клини мікрометра; 39,40 – лінзи об’єктива мікроскопа системи горизонтального круга; 41 – призма тієї же системи; 42,45 – призми системи передавання зображення діаметрально протилежної ділянки горизонтального круга; 43,44 – лінзи об’єктива тієї же системи.
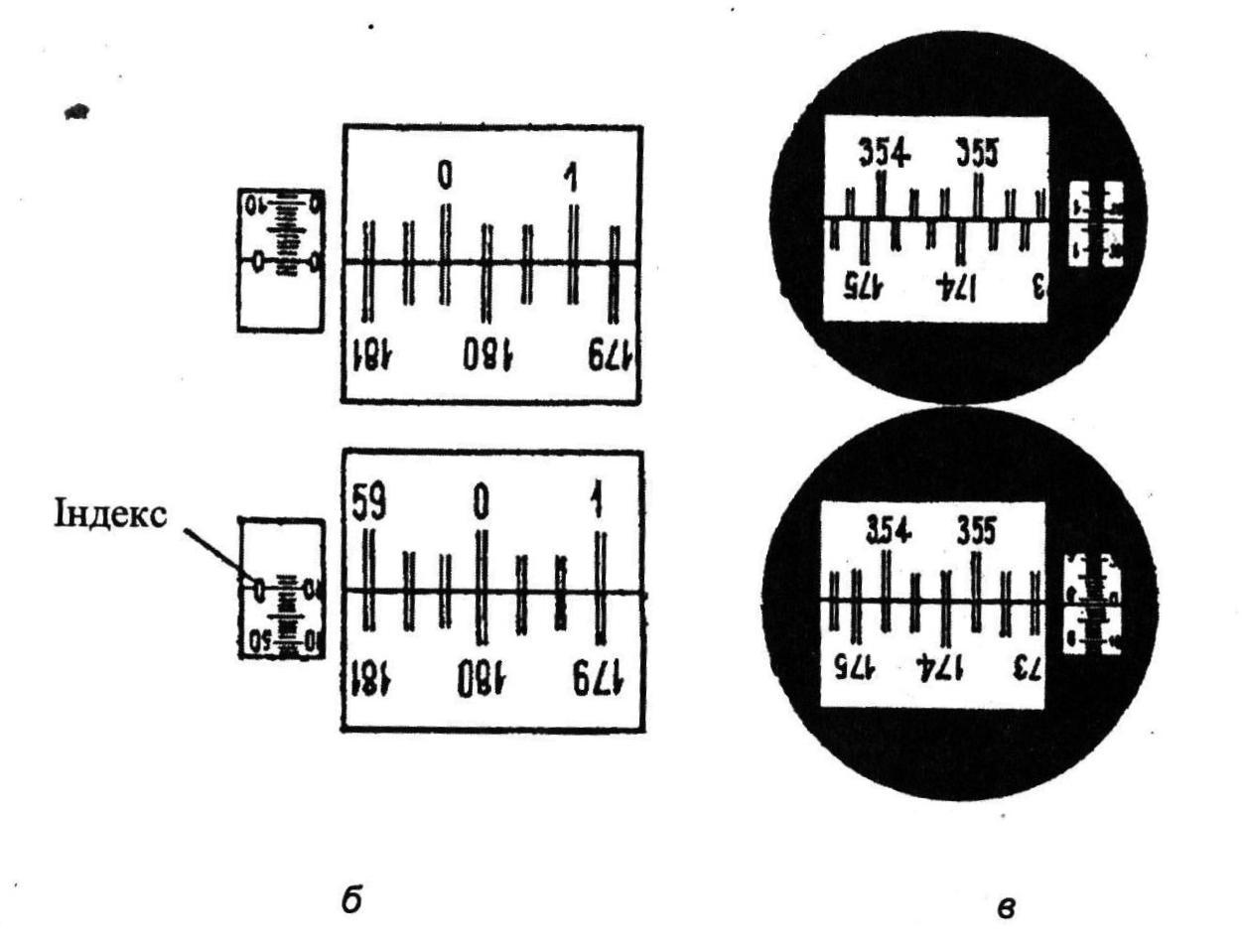
Рис. 3.3, б,в. б – принцип суміщення діаметрально протилежних штрихів шкали круга, в – приклад відлічування за діаметрально протилежними штрихами (λ = 20′; μ = 1″), відлік 354°26′01″.
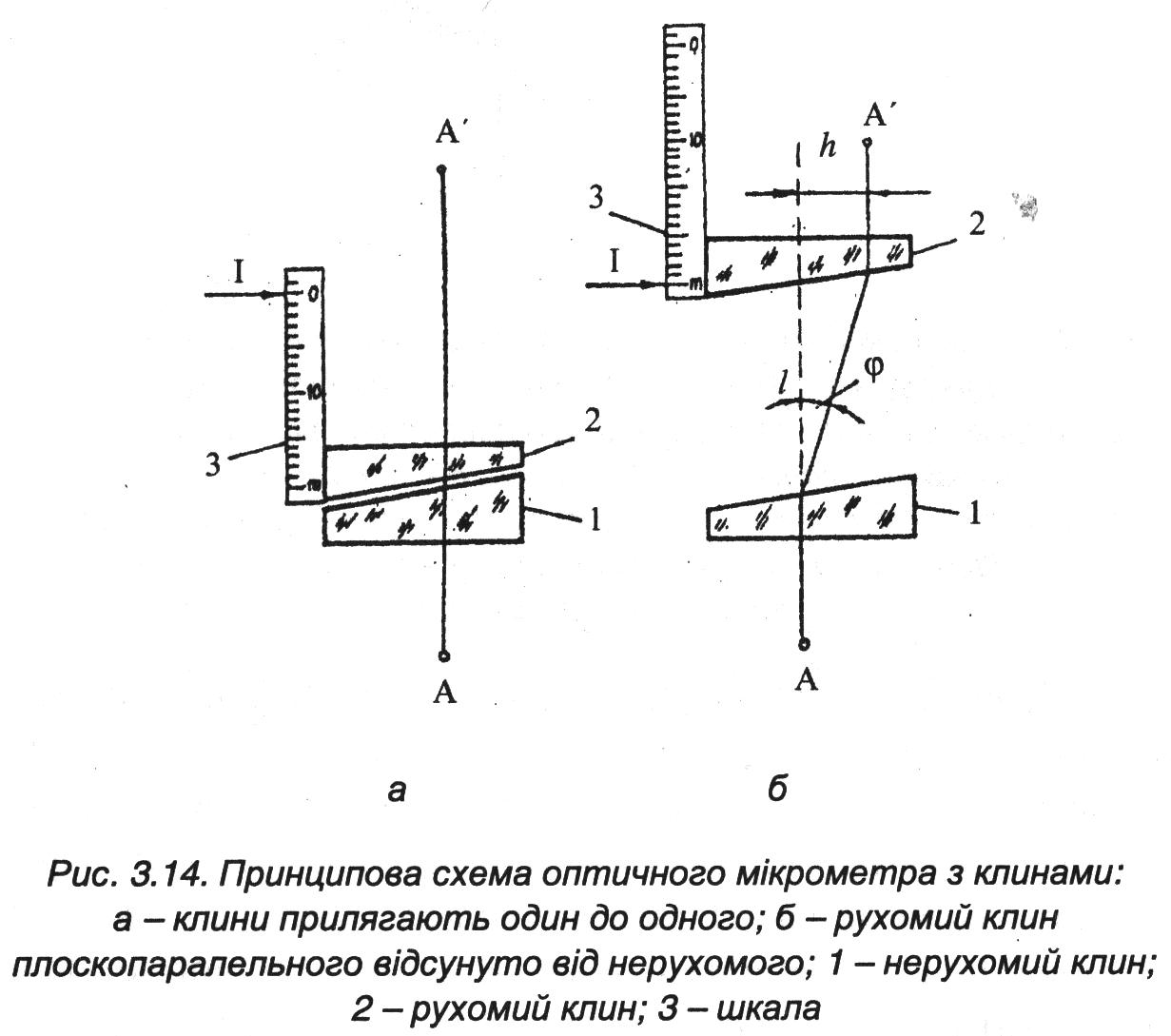 Рис.3.4.
Принципова схема оптичного мікрометра
з клинами: а – клини прилягають один
до одного, б – рухомий клин відсунуто
від нерухомого, 1 – нерухомий клин, 2 –
рухомий клин, 3 – шкала.
Рис.3.4.
Принципова схема оптичного мікрометра
з клинами: а – клини прилягають один
до одного, б – рухомий клин відсунуто
від нерухомого, 1 – нерухомий клин, 2 –
рухомий клин, 3 – шкала.
Щоб відлічити кожен із кругів, треба поставити рукоятку перемикача кругів у потрібне положення (горизонтальне чи вертикальне). Рукоятка перемикача зв`язана з призмою 38, яка в одному своєму положенню (вертикальний круг) перекриває промені від горизонтального круга, а відбиває та спрямовує до мікроскопа промені, що пройшли через вертикальний круг, який і відлічують. Після проведення перемикача у положення “ горизонтальний круг” призма 38 переміщується, звільняючи шлях променям, що пройшли горизонтальний круг, який відлічують. На рис. 3.3,а показано, як оптична система , що складається з деталей 42, 43, 44 і 45, будує навпроти штриха 180° горизонтального круга зображення діаметрально протилежного йому штриха 0°. Надалі промені, що несуть інформацію про штрихи, подаються до клинів. На верхній частині рис.3.3,б діаметрально протилежні штрихи 0° і 180° розміщені один від одного на віддалі рівно одній поділки шкали. Відлік шкали мікрометра 0′,00″. На нижній частині рис. 3.3,б діаметрально протилежні штрихи 0° і 180° ідеально суміщені. Відлік шкали мікрометра 10′ 00″,0. Для того, щоб штрихам у результаті сумісного руху подолати поділку шкали (λ = 20′) кожний з них має пройти шлях λ/2, тобто 10′ (повністю шкалу мікрометра). Отже, поділки (проміжки) між діаметрально протилежними штрихами необхідно оцінювати під час відлічування, як λ/2 . На верхній частині рис.3.3,а штрихи діаметрально протилежних ділянок круга одні відносно одних розташовані безладно. Щоб відлічити, повертають маховичок оптичного мікрометра і суміщають штрихи, як на нижній частині рис.3.3,в. У відлік записують номери штрихів, цифри яких головками догори. Такий молодший штрих – 354, а діаметрально протилежний йому – 174. Між діаметрально протилежними штрихами є дві поділки (проміжки). Ціна поділки λ = 20′ (градусна поділка поділена на три поділки ), а ціна проміжку між 354 і 174 дорівнює λ/2 = 10′. Тому відлік шкали круга 354° + 2×10 = 354°20′. Відлік шкали мікрометра 06′01″ (ціна поділки його шкали μ =1″). На шкалі мікрометра ліворуч підписані одиниці хвилин, праворуч – десятки секунд у хвилині. Відлічувати шкалу мікрометра можна з точністю до десятої частки його поділки, тобто до 0.1″. Відлік на рис. 3.3,в (нижня частина) 354°26′ 01″. Так само, як у наведеному прикладі, відлічують у теодолітів типу Т2 і Theo 010.
В оптичних теодолітах сучасних конструкцій у полі зору мікроскопа двостороннього оптичного мікрометра суміщають не підписані діаметрально протилежні штрихи. На рис. 3.5 наведено приклад відлічування в теодоліті 3Т2КП.
Рис. 3.5 . Поле зору мікроскопа теодоліта 3Т2КП.
Щоб відлічити, суміщають штрихи у центральному віконечку (горизонтальний круг має подвійні штрихи, а вертикальний круг може мати поодинокі). У верхньому віконечку велика цифра 17 – кількість градусів, під нею менші цифри (0,1,2.3,4.5) – десятки хвилин. На шкалі мікрометра, як звичайно , підписані ліворуч – одиниці хвилин (1…,10), праворуч десятки секунд у хвилині (λ = 20′ ; μ =1″). Десятки хвилин, які відлічують, під двозначними цифрами градусів (10,…..99), як на рис.3.4, розташовується по середині між цифрами градусів; під самою цифрою для одноцифрових значень градусів (0,……9); а коли відлік градусів містить три цифри (100,…….359)– під середньою цифрою. Відлік на рис. 3.4 – 17°25′ 27″.
3.2.Дослідження відлікових пристроїв.
Геодезичні прилади перевіряють і досліджують згідно ДЕСТ а і інструкції. Дослідження містять метрологічні випробування окремих вузлів приладів для установлення впливу особливостей їх роботи на точність вимірювань. Стосовно відлікових пристроїв, суттєва увага приділяється випробуванням оптичних мікрометрів та шкалових мікроскопів теодолітів.
3.2.1.Визначення похибок суміщення двосторонніх оптичних мікрометрів.
В теодолітах з двостороннім оптичним мікрометром щоб відлічити під час фокусування кожного з відліків треба сумістити кінці зображень штрихів круга. Від точності суміщення штрихів залежить точність відлічування шкали мікрометра. Похибки суміщення виникають внаслідок того, що суміщати штрихи однаково і абсолютно точно об`єктивно неможливо. Крім того, похибки суміщень залежать від особистих похибок спостерігача, позаяк суміщення штрихів фіксують окомірно. Випробування виконують способом подвійних вимірювань на різних установленнях круга, зокрема для горизонтального круга це 24 установлення.
Горизонтальний круг обертають рукояткою, встановлюючи відліки 0°,15°, 30° тощо, тобто через 15° і попередньо суміщають штрихи згаданою рукояткою.
На кожному установленні круга після попереднього суміщення штрихи двічі одноманітно суміщають маховичком оптичного мікрометра за напрямом руху годинникової стрілки тільки значення секунд у хвилинному інтервалі.
Після визначення різниць – d відліку двох суміщень обчислюють середню квадратичну похибку одного суміщення згідно із залежністю
m
сум = ±
 ,
(3.1)
,
(3.1)
де
– кількість установлень
круга. Різниця
 -
може
істотно залежить від
систематичної складової похибки.
-
може
істотно залежить від
систематичної складової похибки.
Якщо
значення
 ср
< 0,3″, mсум
визначають згідно
із формулою (3.1), а якщо
ср
> 0,3″, застосовують залежність
ср
< 0,3″, mсум
визначають згідно
із формулою (3.1), а якщо
ср
> 0,3″, застосовують залежність
m
сум
= ±
 і
і

 .
(3.2)
.
(3.2)
Приклад визначення похибок суміщення штрихів горизонтального круга теодоліта 3Т2КП № 0117 (табл..3.1).
Таблиця 3.1. Результати визначення похибок суміщення штрихів.
|
|
Установлення (град) |
Від ліки суміщення мікрометра |
|
Установлення, (град) |
Від ліки суміщення мікрометра |
= 1-2 |
|
|
|
|||||||||||||||
|
|
1 |
2 |
1 |
2 |
|
|
|
|||||||||||||||||
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
|
|
|||||||||||||
|
|
0° |
15,3 |
15,8 |
-0,5″ |
180° |
26,6 |
26,8 |
-0,2″ |
|
|
|
|||||||||||||
|
|
15 |
26,1 |
25,8 |
+0,3 |
195 |
37,6 |
37,4 |
+0,2 |
|
|
|
|||||||||||||
|
|
30 |
32 ,9 |
33,2 |
-0,3 |
210 |
8,2 |
7,6 |
+0,6 |
|
|
|
|||||||||||||
|
|
45 |
38,2 |
38,6 |
-0,4 |
225 |
13,3 |
13,7 |
-0,4 |
|
|
|
|||||||||||||
|
|
60 |
23,8 |
23,2 |
+0,6 |
240 |
53,4 |
53,0 |
+0,4 |
|
|
|
|||||||||||||
|
|
75 |
5,2 |
5,3 |
-0,1 |
255 |
24,8 |
25,2 |
-0,4 |
|
|
|
|||||||||||||
|
|
90 |
43,8 |
43,2 |
+0,6 |
270 |
19,2 |
19,4 |
-0,2 |
|
|
|
|||||||||||||
|
|
105 |
49,8 |
50,0 |
-0,2 |
285 |
27,4 |
27,6 |
-0,2 |
|
|
|
|||||||||||||
|
|
120 |
11,8 |
11,7 |
+0,1 |
300 |
23,6 |
23,8 |
-0,2 |
|
|
|
|||||||||||||
|
|
135 |
21,3 |
21,5 |
-0,2 |
315 |
33,0 |
32,6 |
+0,4 |
|
|
|
|||||||||||||
|
|
150 |
26,9 |
26,8 |
+0,1 |
330 |
21,8 |
21,4 |
+0,4 |
|
|
|
|||||||||||||
|
|
165 |
42,6 |
42,9 |
-0,3 |
345 |
45,8 |
45,4 |
+0,4 |
|
|
|
|||||||||||||
|
|
Сума
-0,3 Сума
+0,8 Σd
= -0,3+0,8=0,5″,
Під час випробування вертикального круга його переустановлюють через 1° в інтервалі 82 - 97°. Середня квадратична похибка суміщення штрихів теодоліта 3Т2КП не повинна перевищувати для горизонтального круга 0,5 ″, а вертикального круга – 0,6 ″. Так як = 24× =0,011 < 0 ,3 , середню квадратичну похибку суміщення обчислюють за формулою (3.1) ,яка склала m сум = ±0,25″, що не перевищує її допустимого значення 0,5 ″. 3.2.2.Визначення Рена оптичного мікрометра. Під Реном відлікового пристрою розуміють невідповідність шкали, що зображає оптична система у фокусній площині мікроскопа, зображенню найменшої поділки круга. У двосторонніх оптичних мікрометрах під час обертання маховичка мікрометра зображення штрихів круга сумісно і одночасно рухаються назустріч один одному. Щоб подолати одну поділку λ шкали круга, кожному із штрихів доводиться пройти шлях λ/2 , для чого треба витратити шкалу мікрометра повністю. Позаяк
пучки променів від діаметрально
протилежних ділянок круга досягають
об`єктива мікроскопа різними оптичними
шляхами, видима величина однієї
поділки верхнього зображення круга
може не дорівнювати видимій величині
однієї поділки нижнього зображення
. Наприклад,
для теодолітів 3Т2КП (рис.3.6,а) у полі
зору оптичного мікрометра ретельно
суміщені штрихи А і А+180°. Відлік
шкали мікрометра Однак після цього може виявитися , що штрихи А(0°) і А+180° - λ (179° 40′) суміщені неточно. Після суміщення штрихів А(0°) і А+180° - λ (179° 40′) відлік шкали становить с = 10′ 01″,0 (звичайно два суміщення) (рис.3.6, в). Отже, Реном двостороннього оптичного мікрометра називають різницю між номінальним значенням ціни пів поділки шкали круга та її величиною, виміряною шкалою оптичного мікрометра. Рен залежить від якості юстування оптичної системи відлічування і для різних ділянок круга може бути різним внаслідок впливу ексцентриситету алідади і круга та похибок нанесення поділок круга. У зв`язку з цим вимірювання пів поділок верхнього та нижнього зображень виконують на різних ділянках круга , наприклад через 45° 20 ′ послідовно 0° 00 ′ , 45° 20 ′ , 90° 40 ′ і т.д. Приклад вимірювань і визначення Рену горизонтального круга теодоліта 3Т2КП наведено в табл. 3.2. Програма визначення Рену передбачає виконання прямого і зворотного ходів (у зворотному ході установлення складають 337° 40′ ; 292° 20′ ; 297° 00′ і т. д .). Якщо під час суміщення штрихів індекс оптичного мікрометра установлюється вище нульового штриха шкали, відліку надають знак “ мінус ” , якщо нижче – знак “ плюс ”. А коли індекс установився нижче від штриха шкали 10′ 00″ (більше 10′ 00″), відлік має знак “ плюс ”, вище -“ мінус ” (рис. 3.6). Рен верхніх зображень штрихів визначають згідно із залежністю rв
= (a
- b)
μ +
rн = (a - с) μ + , (3.4) де μ = 1″ - ціна поділки шкали мікрометра . Значення rв і rн визначають за середніми значеннями Рену для прямого rв′ і rн ′ та зворотного rв″ і rн ″ ходів rв
=
Значення rв, rн , r і ∆r горизонтального круга теодоліта 3Т2КП не повинні перевищувати 1,5″ кожний, а вертикального круга - 2,5 ″. Для визначення Рену вертикального кругу вимірювання виконують у секторі 10 - 120° через кожні 5° . Для зручності введення поправки складають таблицю або графік поправок . Проте варто зазначити, що введення поправки за Рен є трудомістким навіть за наявністю таблиці або графіка. Якщо значення rв, rн , r і ∆r перевищують допустимі, їх виправляють, або вводять у кожній відлік шкали мікрометра поправку за Рен δr , яку обчислюють за формулою δr
=
3. 2.3 Визначення Рену мікроскопа зі шкалою . В теодолітах, що мають мікроскопи зі шкалою, Рен – це невідповідність зображення поділки шкали круга довжині шкали мікроскопа. До цих теодолітів відносять типи Т5 – 3Т5КП; 2Т5КП ;2Т5тощо. Рен визначають способом порівняння поділки шкали круга безпосередньо з довжиною шкали мікроскопа. Таблиця 3.3,а Визначення Рену мікроскопа зі шкалою. |
|
|
|
||||||||||||||||||||
№п |
відлік |
а =0′+ |
в=10′+ |
с=10′+ |
rн= а-в+ 10′ |
rв= а-с+ 10′ |
№п |
відлік |
а =0′+ |
в 10′+ |
с=10′+ |
rн= а-в+ 10′ |
rв= а-с+ 10′ |
|
|||||||||||
1 |
0° 00′ |
-1,8″ -2,5 |
0,0 0,0 |
0,0 0,0″ |
-1,8″ -2,5 |
-1,8″ -2,5 |
16 |
22° 20′ |
-2,5″ -2,1 |
1,0 -0,2″ |
0″ 0 0″ 0 |
-3,5 -1,9″ |
-2,5 -2,1″ |
||||||||||||
2 |
45° 20′ |
-2,0 -3,0 |
0 0 |
0 0 |
-2,0 -3,0 |
-2,0 -3,0 |
15 |
67° 40′ |
-2,8″ -3,0 |
-0,2″ 0 |
-1,5 -1,5 |
-2,6 -3,0 |
-1,3 -0,5 |
||||||||||||
3 |
90° 40′ |
-2,6 -3,0 |
0 0 |
-0,4-1,1 |
-2,6 -3,0 |
-2,2 -1,9 |
14 |
112° 00′ |
-2,1 -0,1 |
-0,5 1,0 |
-0,5 1,0 |
-2,6 -0,9 |
2,6 -0,9 |
||||||||||||
4 |
135° 00 |
-2,5 -2,0 |
-0,2 0 |
-2,2 -1,6 |
-2,3 -2,0 |
-0,3 -0,4 |
13 |
157° 20′ |
-1,6 0 |
1,0 1,0 |
0 0,5 |
-2,6 -1,0 |
-1,6 -0,5 |
||||||||||||
5 |
180 20 |
-2,0 0 |
0 0,5 |
0,5 0 |
-2,0 -0,5 |
-2, 5 0 |
12 |
202° 40′ |
-1,9 -1,5 |
1,0 1,0 |
0,5 0,5 |
-2,9 -2,5 |
-2,4 -2,0 |
||||||||||||
6 |
225° 40 |
-2,0 -2,9 |
0 0 |
-2,1 -0,9 |
-2,0 -2,9 |
-0,1 -2,0 |
11 |
248° 00′ |
-1,5 -2,0 |
-1,0 0 |
2,5 -2,2 |
-0,5 -2,0 |
0 0,2 |
||||||||||||
7 |
270° 00 |
-2,5 -2,0 |
0,5 1,0 |
-0,2 0 |
-3,0 0 |
-3,0 -2,0 |
10 |
292° 20′ |
-3,0 -1,5 |
1,0 1,0 |
1,0 1,0 |
-4,0 -2,5 |
-4,0 -2,5 |
||||||||||||
8 |
315° 20 |
-2,0 -1,0 |
0 0 |
-2,0 -1,5 |
-2,0 -1,0 |
0 0,5 |
9 |
337° 40′ |
-1,0 -1,5 |
0,5 0,5 |
-0,5 -0,9 |
-1,5 -1,5 |
-0,5 -0,6 |
||||||||||||
 =
1-2
=
1-2 =
= ×0,5=0,021,
×0,5=0,021,
 =3,03,
=3,03,
 =
24×
=
24× =0,011<0,3,
m
сум
=±
=
=0,011<0,3,
m
сум
=±
= =±0,25″,
М =
m
сум
/
=±0,25″,
М =
m
сум
/ = 0,25
/
= 0,25
/
 = 0,25
/ 4,9
= 0,051″.
= 0,25
/ 4,9
= 0,051″.
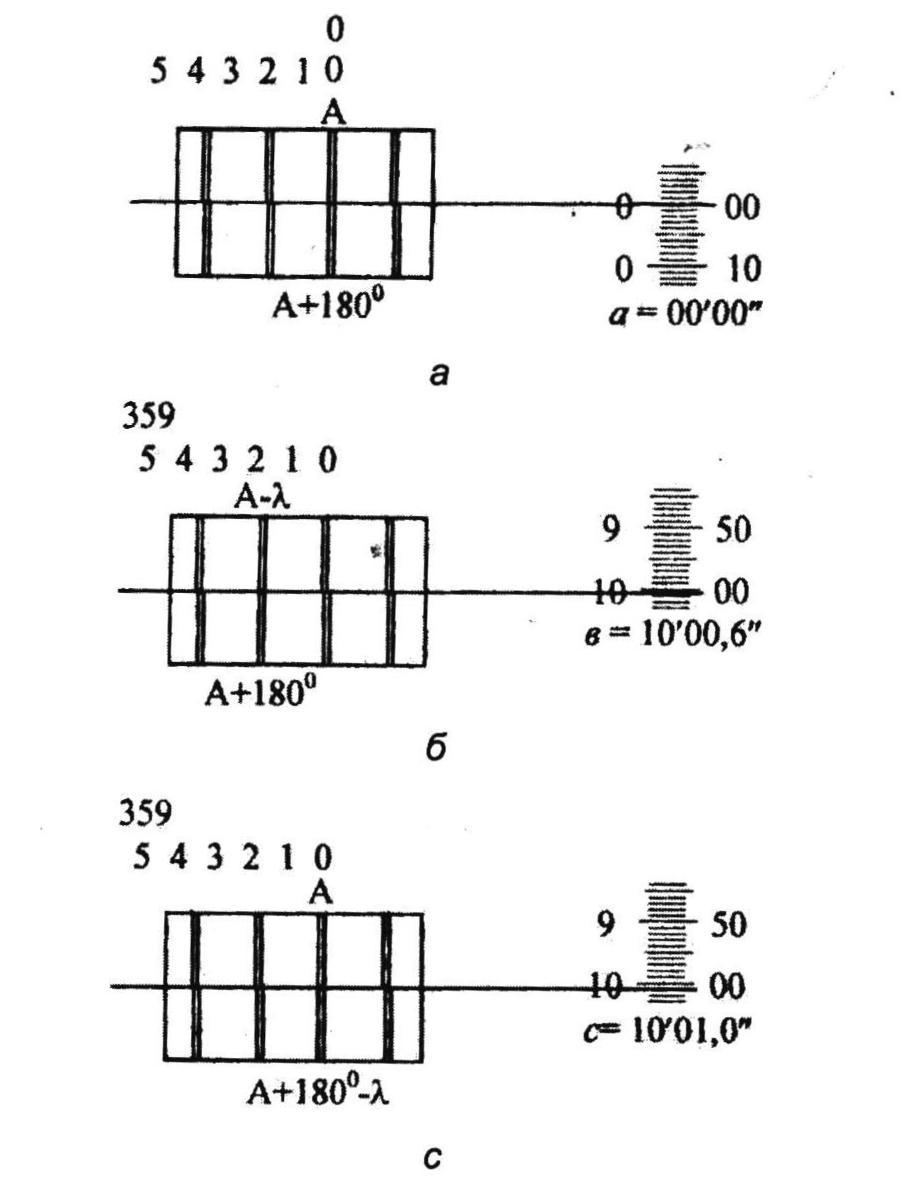 Рис.3.6.
Визначення Рену теодоліта 3Т2КП
.
Рис.3.6.
Визначення Рену теодоліта 3Т2КП
.
 =0′ 00″,0 (під час випробування зазвичай
виконують два суміщення ). Обертаючі
маховичок оптичного мікрометра,
суміщають штрихи А+180° ( 180) з і штрихом
А - λ (359° 40′ ), як вказано на рис.3.6 ,б
і відлічують шкалу мікрометра в =
10′ 00″,6 (звичайно виконують два
суміщення).
=0′ 00″,0 (під час випробування зазвичай
виконують два суміщення ). Обертаючі
маховичок оптичного мікрометра,
суміщають штрихи А+180° ( 180) з і штрихом
А - λ (359° 40′ ), як вказано на рис.3.6 ,б
і відлічують шкалу мікрометра в =
10′ 00″,6 (звичайно виконують два
суміщення).
 , (3.3)
а Рен нижчих зображень - із
залежністю
, (3.3)
а Рен нижчих зображень - із
залежністю
 (rв′
+ rв″
) ; r
н
=
(rн
′ + rн
″ )
. (3.5)
Загальний
середній Рен r
=
(rв
+ r
н)
(3.6)
і різниця
∆r
= rв
– rн
. (3.7)
(rв′
+ rв″
) ; r
н
=
(rн
′ + rн
″ )
. (3.5)
Загальний
середній Рен r
=
(rв
+ r
н)
(3.6)
і різниця
∆r
= rв
– rн
. (3.7)
 k
,
(3.8) де k
– відлік хвилин
шкали мікрометра;
10′
- кутова величина
шкали мікрометра.
Вважають, що вводити поправку за Рен
доцільно при невеликих (до 3 – 5″
) значеннях r
і ∆r.
Тому
Рен
необхідно
усунути через юстування,
яке робиться у
спеціальній майстерні або
геодезистом високої кваліфікації
у разі необхідності. Приклад
визначення Рену – табл..3.2. На кожному
установленні виконується два
введення штриха у бісектор.
k
,
(3.8) де k
– відлік хвилин
шкали мікрометра;
10′
- кутова величина
шкали мікрометра.
Вважають, що вводити поправку за Рен
доцільно при невеликих (до 3 – 5″
) значеннях r
і ∆r.
Тому
Рен
необхідно
усунути через юстування,
яке робиться у
спеціальній майстерні або
геодезистом високої кваліфікації
у разі необхідності. Приклад
визначення Рену – табл..3.2. На кожному
установленні виконується два
введення штриха у бісектор.
Середнє
 -2.2;
-2.2;
 -1,4.
Середнє
-2.2;
-1,4.
-1,4.
Середнє
-2.2;
-1,4.
 =
-2.2″,
=
-2.2″,
 = -1.5″, r
= - 1.8″ >
= -1.5″, r
= - 1.8″ >  і ∆r
= - 1.7 >
і ∆r
= - 1.7 >
Поправка до відліку. Таблиця 3.3,б.
Відлік по мікрометру - Nі |
|||||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
||
Поправка до відліку –δ r |
|||||||||||
-0,2 |
-0,4 |
-0,5 |
-0,7 |
-0,9 |
-1,1 |
-1,3 |
-1,4 |
-1,6 |
-1,8 |
||
Значення Рена визначають згідно із залежністю
r
=
 (3.9)
(3.9)
де
 відлік на шкалі мікроскопа молодшим
штрихом відносно зображення штриха
круга , який суміщено з нульовим штрихом
шкали;
відлік на шкалі мікроскопа молодшим
штрихом відносно зображення штриха
круга , який суміщено з нульовим штрихом
шкали;
 - номінальне значення ціни поділки
круга;
- кількість установлень круга.
Рен
визначають на різних ділянках круга,
виконуючи прямий та зворотний ходи,
переставляючи для цього круг на 45° ,
наприклад, у прямому ході 0°, 45°, 90° і
т.д., а у зворотному – 330°, 285°, 240°
і т.д. Номер штриха круга на кожному
установленні встановлюють поворотом
алідади або круга, точно суміщаючи
навідним гвинтом алідади зображення
потрібного штриха круга з нульовим
штрихом мікроскопа. Відлічують положення
молодшого штриха круга на шкалі.
- номінальне значення ціни поділки
круга;
- кількість установлень круга.
Рен
визначають на різних ділянках круга,
виконуючи прямий та зворотний ходи,
переставляючи для цього круг на 45° ,
наприклад, у прямому ході 0°, 45°, 90° і
т.д., а у зворотному – 330°, 285°, 240°
і т.д. Номер штриха круга на кожному
установленні встановлюють поворотом
алідади або круга, точно суміщаючи
навідним гвинтом алідади зображення
потрібного штриха круга з нульовим
штрихом мікроскопа. Відлічують положення
молодшого штриха круга на шкалі.
В теодолітах типу Т5 (3Т5КП) значення rср не повинно перевищувати 3″.
Таблиця 3.4
Результати визначення Рену мікроскопа зі шкалою теодоліта 3Т5КП № 2773 ( прямий хід ) .
Значе-ння круга |
Відлік по шкалі bі |
Рен r = 60- bі |
Поправка за Рен |
|
при відліку ∆υ |
Поправка до відліку δ= ∆υ ×r ср / υ |
|||
0° |
59,8′ |
+0,2′ |
10′ |
+0,03′ |
45 |
59,9 |
+0,1 |
20′ |
+0,06 |
90 |
59,7 |
+0,3 |
30 |
+0,10 |
135 |
59,8′ |
+0,2 |
40 |
+0, 13 |
180 |
59,9 |
+0,1 |
50 |
+0,16 |
225 |
59,8 |
+0,2 |
60′ |
+0,19 |
270 |
59,8 |
+0,2 |
|
|
315 |
59,8 |
+0,2 |
||
 =
=
 ×
Σ
r
= 0,19′, Σ
r
= + 1,
5′.
×
Σ
r
= 0,19′, Σ
r
= + 1,
5′.
При великих значеннях Рена у відлік по шкалі ∆υ вводять поправки
δі= ∆υ ×rср / υ , (3.10)
де υ – ціна ділення лімба.
Приклад обчислення поправки за Рен:
1. Відлік по горизонтальному кругу складає 112°46,4′.
2. Поправка за Рен δі = (+0,19) × 46,4 ′ / 60′ = + 0,15′.
3. Виправлений відлік 112° 46,6′.
3.3. Порядок виконання лабораторної роботи .
1. Накреслите принципову оптичну схему теодоліта з двостороннім оптичним мікрометром з клинами (або зробіть ксерокопію з рис.3.1).
Опішите основні деталі, які складають цю систему.
2. Накреслите оптичну схему мікрометра з клинами (рис 3.2,а,б,в) або зробіть ксерокопію і опишіть основні деталі, що складають цю систему.
3. Нарисуйте поле зору мікроскопа двостороннього оптичного мікрометра і дайте опис прикладу відлічування в теодоліті 3Т2КП.
4. Виконайте випробування похибок суміщення штрихів двостороннього оптичного мікрометра (п. 2.2) і виконайте оцінку точності отриманих значень.
5. Виконайте випробування Рену оптичного мікрометра (п. 2.3 ) і наведіть приклад обчислення поправки за Рен.
6. Дайте висновок про стан і точність відлічування оптичним мікрометром.
3.4. Контрольні запитання.
1. Для якої цілі застосовують двосторонній оптичний мікрометр?
2. Які основні деталі містить двосторонній оптичний мікрометр?
3. Який порядок відлічування в теодоліті 3Т2КП?
4. Як визначається середня квадратична похибка суміщення штрихів оптичного мікрометра?
5. Що називають Реном оптичного мікрометра і як його визначають?
6. Як враховують результати визначення Рену оптичного мікрометра і коли його виправляють у майстерні?
Лабораторна робота № 4.
Вивчення конструкції і основних метрологічних характеристик рідинних рівнів та компенсатора нахилу теодоліта 3Т2КП .
Мета роботи: Вивчити конструктивні особливості циліндричного і сферичного рівнів та компенсатора нахилу вертикального круга теодоліта 3Т2КП. Визначити основні метрологічні характеристики – ціну поділки рівня і діапазон роботи компенсатора.
4.1.Основні відомості про рідинні рівні.
Рівнями в геодезичних приладах називаються пристрої для встановлення окремих вузлів приладів (частіше осей) прямовисно або горизонтально. Рівні також використовують для вимірювання малих кутів нахилу.
За принципом дії рівні існують рідинні, електронні і пружні . В оптико - механічних геодезичних приладах застосовують у більшості рідинні рівні. Основним конструктивним елементом рідинного рівня є заповнена рідиною скляна ампула. Вона встановлена в оправі,за допомогою якої ампулу закріплюють на приладі.
За формою ампули рівні поділяють на циліндричні та сферичні. Циліндричні рівні призначені для точнішого встановлення вузлів приладів у задане положення, а сферичні рівні – для менш точного але більш скорішого встановлення вузлів приладів.
За точністю рівні поділяють на установочні (частіше сферичні) з ціною поділки 5 - 10′, технічні – з ціною поділки близької однієї хвилині, точні – в яких ціна поділки не перебільшує 30″ і високоточні, які мають ціну поділки не більш 10″.
Ампулу заповнюють нагрітою легко рухомою рідиною, яка не розкладається від дії світла і тепла та має низьку точку змерзання (до - 50° С) та запаюється. У запаяній ампулі залишається бульбашка, що являє собою пари рідини, якою наповнюють ампулу. Зазвичай бульбашка має 0,3 – 0,4 довжини ампули за температурою повітря t = + 20° С. В якості рідини використовують ефір етиловий наркозний (для точних і високоточних рівнів), або суміш цього ефіру зі спиртом етиловим (для установочних рівнів). Бульбашка рівня завжди намагається переміститися так, щоб зайняти найвище положення. Для того, щоб фіксувати переміщення бульбашки рівня і визначати у будь – який момент її положення, на зовнішній поверхні ампули гравіруванням наносять поділки перпендикулярно до поздовжній її осі з інтервалом 2 мм. Штрихи шкал ампул точних і високоточних рівнів цифрують.
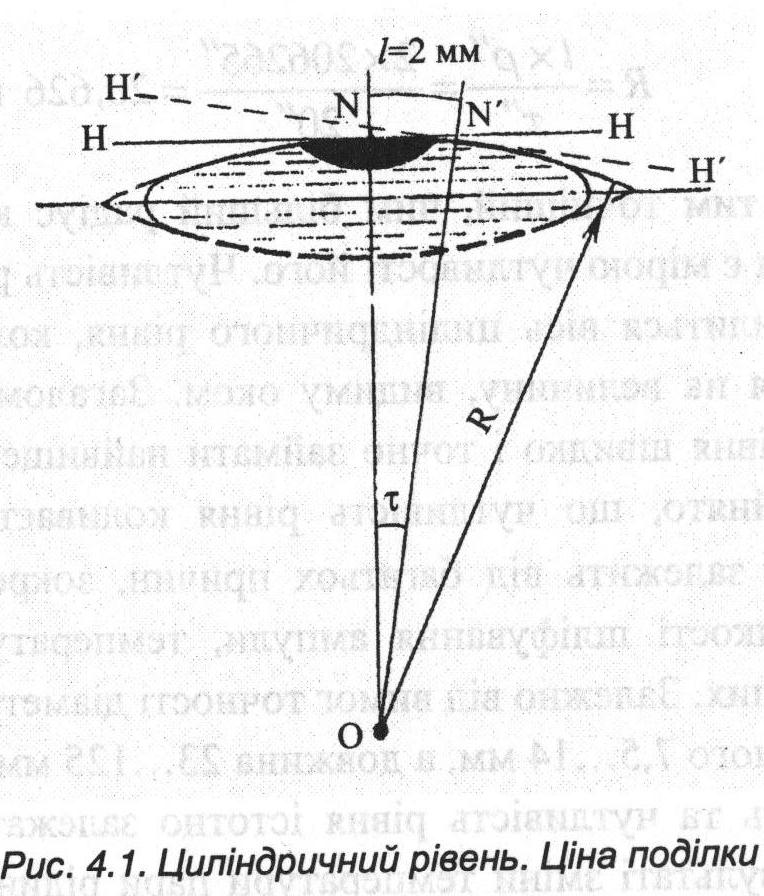
Нормаль до внутрішньої поверхні циліндричної ампули рівня (рис.4.1) перетинає центральний штрих у точці N. Точку N називають нуль – пунктом рівня. Дотичну Н –Н до внутрішньої поверхні ампули в її нуль – пункті називають віссю циліндричного рівня. Коли середина бульбашки рівня збігається з нуль – пунктом, вісь циліндричного рівня займає горизонтальне положення, а нормаль ОN - прямовисне. Якщо нахилити рівень так, щоб бульбашка перемістилася рівно на одну поділку, його нуль – пункт також переміститися на одну поділку. Вісь рівня та нормаль ОN нахиляться на кут τ і займуть положення Н′ –Н′ і ОN′ відповідно. Тоді
 =
=
 , звідки
, звідки
 ,
(4.1) де
,
(4.1) де =2
мм – інтервал між штрихами шкали ампули,
=2
мм – інтервал між штрихами шкали ампули,
 .
Кут
.
Кут
 ,
на який нахилиться вісь рівня, коли
бульбашка переміститься на одну поділку
шкали рівня, називають ціною
поділки рівня.
,
на який нахилиться вісь рівня, коли
бульбашка переміститься на одну поділку
шкали рівня, називають ціною
поділки рівня.
Наприклад,
якщо
=20 ,
радіус кривини складає
,
радіус кривини складає
 =
=
 20,626 м.
20,626 м.
Рівень тим точніше, чим більше радіус кривини. Ціна поділки рівня є мірою його чутливості. Чутливість рівня, коли бульбашка переміститься на величину , видиму оком. Загалом це здатність бульбашки рівня швидко і точно займати найвище положення в ампулі. Прийнято, що чутливість рівня коливається у межах 0,15 – 0,04 і залежить від довжини бульбашки, якості шліфування ампули, температури, діаметра ампули тощо. Залежно від вимог точності діаметр ампули може бути здебільшого 7,5 – 14 мм , а довжина – 23 – 125 мм. Точність та чутливість рівня істотно залежать від температури . У результаті зміни температури пари рідини, що наповнюють ампулу, досить легко переходять із стану газоподібного у рідкий і навпаки. Довжина бульбашки змінюється і це позначається на точності рівня. Щоб запобігти цьому і зробити довжину бульбашки незміною, в ампулу встановлюють скляну перегородку (рис. 4.2,а), що поділяє її на дві камери, але не з повним її перекриттям. Частина бульбашки при цьому залишиться у менший камері.
У разі необхідності, нахиляючи ампулу, перерозподіляють бульбашку з камери у камеру, регулюючи довжину бульбашки так , щоб вона залишилась незмінною.
З цією самою метою в ампулу вкладають скляну компенсаційну паличку (рис. 4.2,б) дещо коротшу від самої ампули.
Завдяки великій теплоємності скляної палички вдається досягти практично сталої температури рідини в ампулі і, як наслідок, незмінності довжини бульбашки.
Ампулу рівня встановлюють в оправу нерухомо, але так, щоб деформація оправи не впливала на ампулу.
Найпростіший спосіб закріплення ампули в оправі - гіпсом. Це застосовують для рівнів, що мають ціну поділки більше за 30″.
Для закріплення ампул рівнів з ціною поділки 20″ і менше, застосовують ковпачки з латуні або алюмінієвих сплавів, які одягають на ампулу з двох кінців і фіксують на неї клеєм або лаком.
Ковпачки щільно притискають до оправи. Один кінець оправи з`єднають з корпусом приладу шарнірно, а інший , виконаний у вигляді хвостовика, з`єднають з корпусом через юстувальний пристрій, наприклад гвинт.
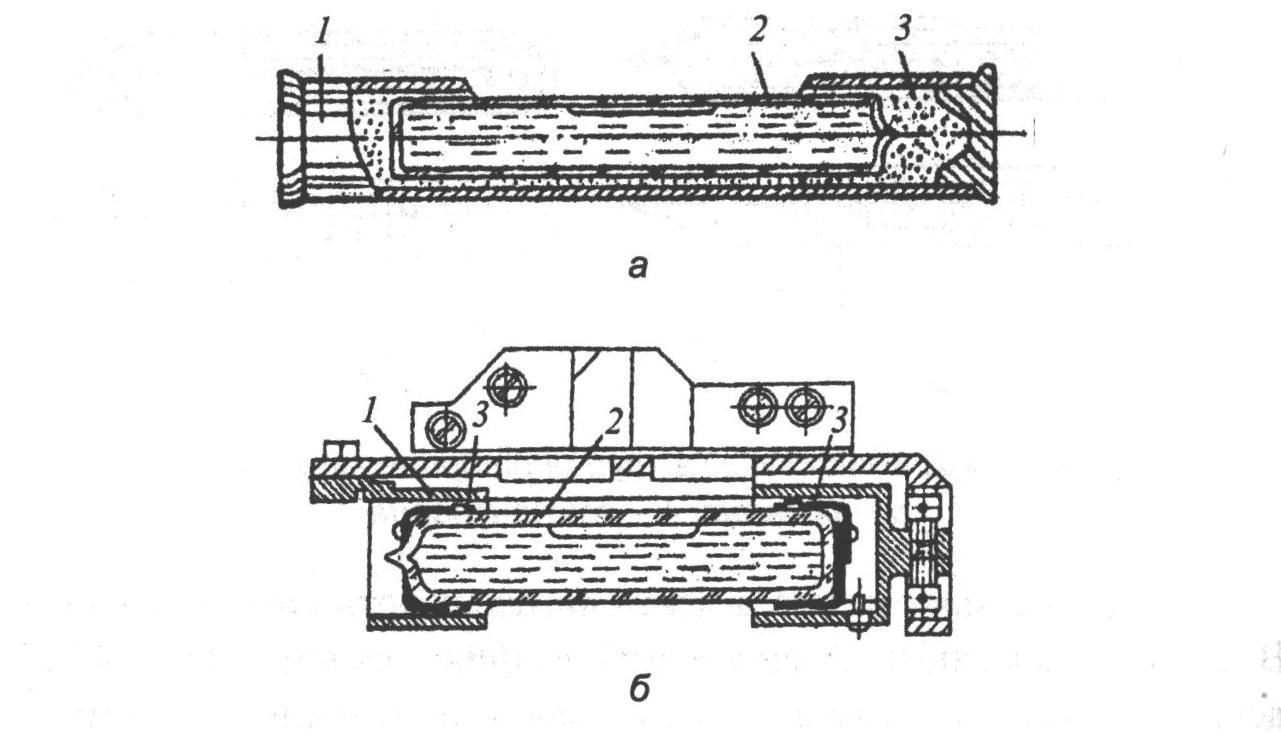
Рис.
4.2. Способи закріплення рівня в оправі
: а – гіпсом
, 1 – оправа, 2 – ампула, 3 – гіпс; б – за
допомогою ковпачків, 1 – оправа, 2 –
ампула, 3 – ковпачки .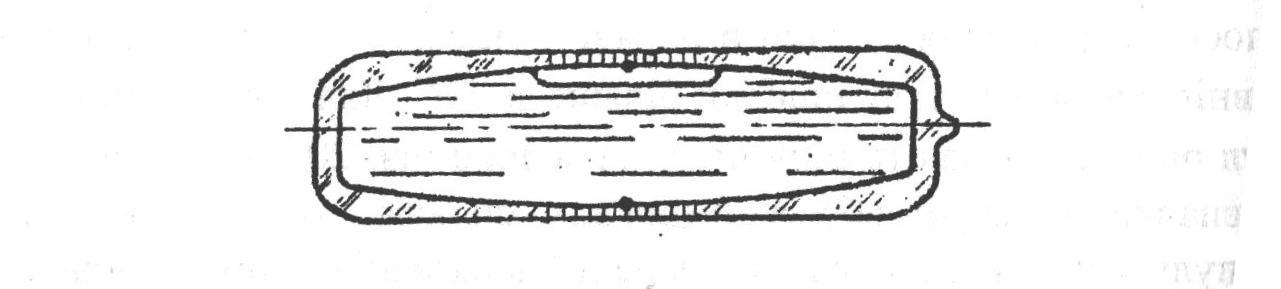
Рис. 4.3. Ампула реверсивного рівня .
На рис.4.2,а показано закріплення ампули в оправі гіпсом, а на рис.4.2,б – за допомогою ковпачків.
Рівні, що встановлені на геодезичних приладах, дають змогу виконувати різноманітні дії, що пов’язані з експлуатацію приладу; приводити у прямовисне положення його вертикальні осі (наприклад, рівень алідади горизонтального круга теодоліта); контролювати положення індексу алідади вертикального круга відносно прямовисного напрямку (рівень вертикального круга); приводити візирну вісь зорової труби в горизонтальне положення, коли рівень встановлено на трубі. Рівні вертикальних кругів теодолітів і нівелірів є контактними, в яких приведення бульбашки до середини виконують, суміщаючи зображення її кінців у спеціальному оптичному пристрої (рис.4.4)
Над рівнем розташовують систему призм, розміщених так, що до кожного її блоку потрапляє зображення половини кінця бульбашки рівня. Половина протилежних кінців бульбашки
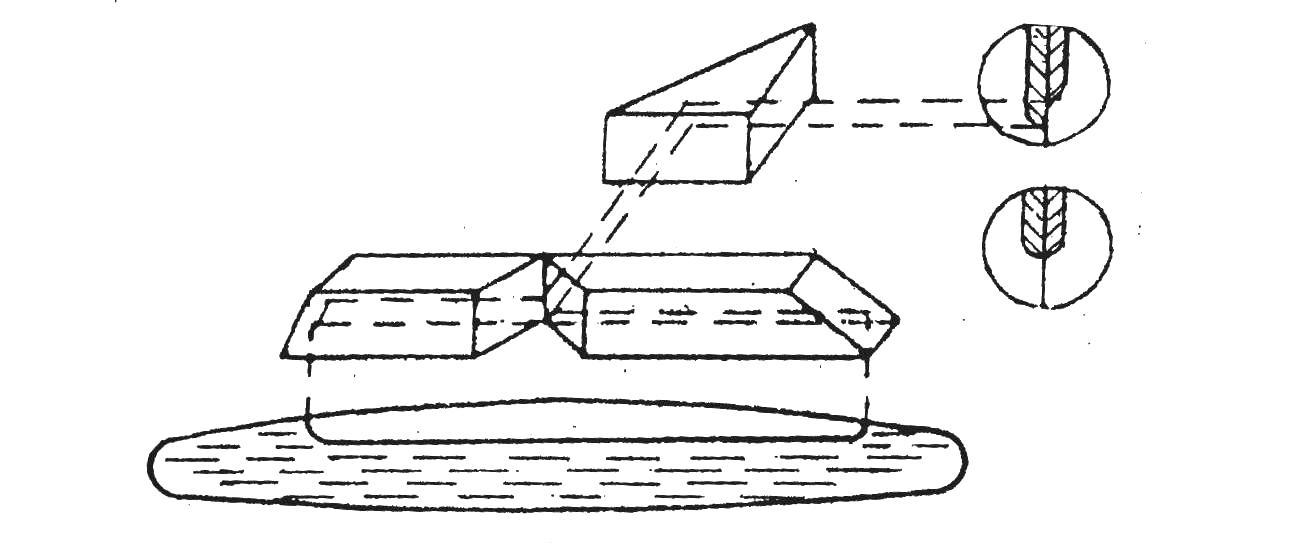
Рис.
4.4. Передавання зображення кінців
бульбашки контактного рівня у поле зору
зорової труби
суміщаються
так, щоб їх було видно одночасно і поруч.
Під час будь – якого довільного положення
бульбашки зображення її кінців
розташовуються як завгодно, а коли
бульбашка на середині ампули, кінці її
виглядають суміщеними такими, що
контактують один з одним. Контактні
рівні дають можливість з більшою точністю
встановлювати бульбашку рівня у нуль
– пункт.
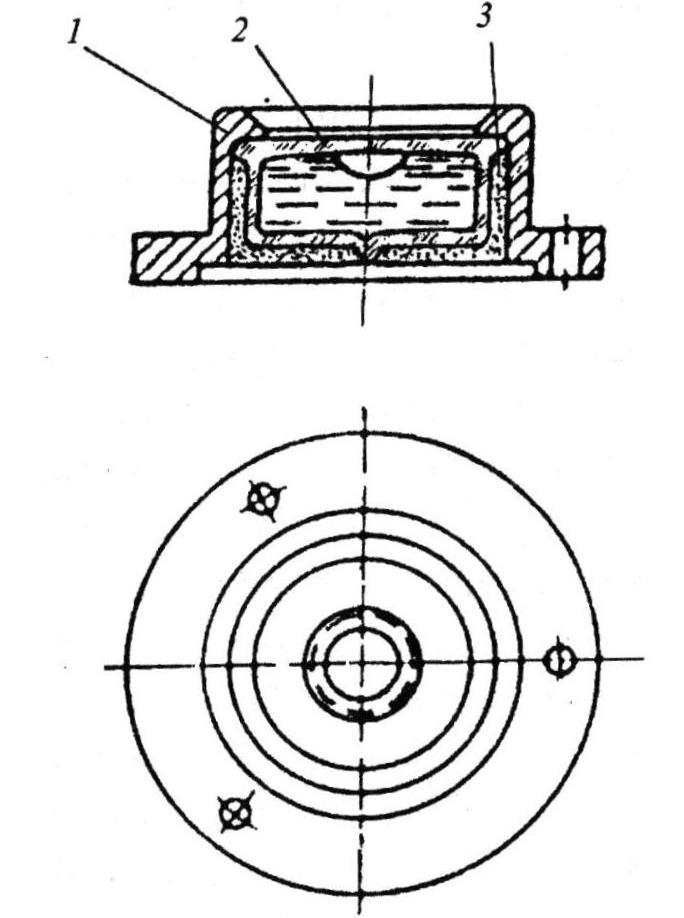
Рис.4.5. Сферичний рівень: 1 – оправа, 2 – ампула, 3 – гіпс.
У сферичних рівнів ампулою є циліндрична посудина, верхня внутрішня поверхня якої шліфована як сфера (рис.4.5). Бульбашка сферичного рівня має форму кола діаметром декілька міліметрів.
На зовнішній верхній поверхні ампули нанесена шкала у вигляді концентричних кіл, центром яких є нуль – пункт рівня. Вісь сферичного рівня – нормаль до внутрішньої сферичної поверхні рівня, що проходить через його нуль – пункт. Коли бульбашка у нуль – пункті . тоді вісь рівня прямовисна. Ампулу сферичного рівня встановлюють і закріплюють у металевій оправі, яка має три виправні гвинти.
Сферичні рівні невисокої точності – ціна поділки рідко менше за 8′. Вони призначені для грубого приведення у горизонтальне положення площин та у прямовисне положення осей приладів.
Проте вони мають перевагу над циліндричними рівнями у тому, що бульбашку приводять до середини в одному положенні рівня, що дає змогу виконувати цю операцію швидші.
4.2.Випробування рідинних рівнів.
Випробування рідинних рівнів найчастіше має на меті визначення ціни поділки шкали рівня та його чутливості.
4.2.1. Визначення ціни поділки рівня за допомогою нівелірної рейки.
Цей спосіб застосовують для дослідження рівнів, які закріплені на зорових трубах теодолітів і нівелірів.
Порядок визначення ціни поділки рівня такий.
Прилад встановлюють на віддалі L = 20 -50 м від прямовисно встановленої рейки так, щоб один з підіймальних гвинтів підставки був у створі з рейкою (рис.4.6) . Прилад приводять у робоче положення і встановлюють бульбашку рівня на середині. Обертають підіймальний гвинт, розташований у створі з рейкою, або елеваційний гвинт,
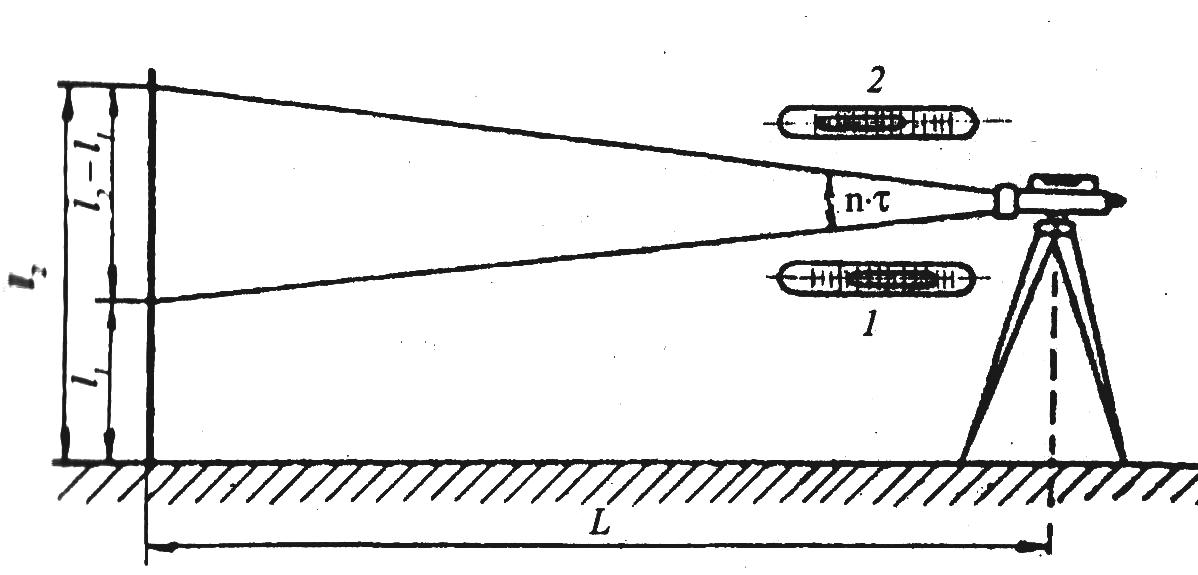 Рис.4.6.
Схема визначення ціни поділки рівня
за допомогою рейки: 1- е положення
бульбашки рівня (відлік
Рис.4.6.
Схема визначення ціни поділки рівня
за допомогою рейки: 1- е положення
бульбашки рівня (відлік
 );
2- е положення бульбашки рівня (відлік
);
2- е положення бульбашки рівня (відлік
 ).
).
і переміщають
бульбашку рівня до одного з країв його
шкали. Фіксують по ній відлік кінця
бульбашки, наприклад
(положення
1
на
рис 4.6
). Одночасно з цим
відлічують по рейці
 .
.
Потім
нахиляють зорову трубу за допомогою
згаданих гвинтів у протилежному напрямку,
переміщають бульбашку рівня до другого
краю шкали і відлічують по неї тим самим
кінцем бульбашки, наприклад
(положення 2 рис.4.6).
Одночасно фіксують по рейці відлік
 .
Ціну поділки рівня визначають із виразу
=
.
Ціну поділки рівня визначають із виразу
=
 ,
(4.2)
,
(4.2)
де
 -
кількість поділок,
які пройшла бульбашка під час переміщення
від одного краю шкали до іншого.
-
кількість поділок,
які пройшла бульбашка під час переміщення
від одного краю шкали до іншого.
Приклад визначення ціни поділки рівня нівеліра наведено в табл..4.1. Таблиця 4.1.
№ прийому ; віддаль до рейки |
Від ліки по рейці |
Відлікові по кінцях бульбашки рівня |
а=
0,5(Л + П);
|
|||
Л |
П |
|||||
1 прийом L =37,80 м
|
1828 1812 h =16 мм |
-5,5 -1,3 -4,2 |
+2,3 +6,5 -4,2 |
|
||
2 прийом L =31,04 м
|
1729 1716 h =13 мм |
-6,1 -1,6 -4,5 |
+1,9 +6,3 -4,4 |
= -2,1 +2,4 n = 4,5 |
||
 +
+
 =n
=n =
-1,6
=
-1,6
 +2,6
n
= 4,2
+2,6
n
= 4,2
Розрахунок ціни поділки рівня:
|
 =
= 20,8
;
20,8
;
 =19,2
=19,2
 =0,5 (
+
=0,5 (
+
 )
= 0,5 (20,8
+ 19,2 )= 20,0
.
)
= 0,5 (20,8
+ 19,2 )= 20,0
.
Нульовий штрих шкали ампули рівня збігається з її серединою, тому відлікові ліворуч від нуль - пункту мають позначку – мінус, а праворуч – позначку плюс.
Нівелір,
що приведений у робоче положення,
підіймальним гвинтом, розташованим у
створі з рейкою, нахиляють прилад,
переміщаючи бульбашку спочатку ліворуч
від нуль – пункту на декілька поділок.
Відлічують по кінцях
бульбашки:
лівий =
-5,5, правий
=
-5,5, правий
 =+
2,3 і по рейці
=
1828 мм. Тим самим гвинтом нахиляють
прилад у другий бік, переміщаючи бульбашку
рівня у протилежному напрямку, наприклад
праворуч від нуль – пункту, відлічують
по кінцях бульбашки:
лівий
=+
2,3 і по рейці
=
1828 мм. Тим самим гвинтом нахиляють
прилад у другий бік, переміщаючи бульбашку
рівня у протилежному напрямку, наприклад
праворуч від нуль – пункту, відлічують
по кінцях бульбашки:
лівий =
- 1,3 , правий
=
- 1,3 , правий
 =+
6,5 і по рейці
=
1812 мм. Переміщення бульбашки визначають,
як
=
=+
6,5 і по рейці
=
1812 мм. Переміщення бульбашки визначають,
як
=
 +4,2 діл. і
=
+4,2 діл. і
=
 +4,2 діл. Проте спочатку треба визначити
переміщення середини бульбашки рівня
відносно нуль – пункту, як
=0,5(
+
)
діл. і
= 0,5(
+
)
діл,
а потім переміщення
її між двома установками
+4,2 діл. Проте спочатку треба визначити
переміщення середини бульбашки рівня
відносно нуль – пункту, як
=0,5(
+
)
діл. і
= 0,5(
+
)
діл,
а потім переміщення
її між двома установками
 +
+ = nділ.
Ціну поділки рівня
визначають
за
формулою (4.2). Другий
прийом виконують після зміни віддалі
від приладу до рейки. Цину поділки рівня
визначають як середнє з двох прийомів.
= nділ.
Ціну поділки рівня
визначають
за
формулою (4.2). Другий
прийом виконують після зміни віддалі
від приладу до рейки. Цину поділки рівня
визначають як середнє з двох прийомів.
4.2.2.
Визначення ціни поділки рівня способом
повернення алідади довкола нахиленої
осі теодоліту.
Цей спосіб називається способом Комстока
і застосовується при визначенні ціни
поділки рівнів точних і високоточних
теодолітів. Суть способу складається
в установленні залежності між кутом
нахилу площини лімба –υ
і кутом нахилу осі вивіреного рівня
 та
та
 при двох положеннях алідади
при двох положеннях алідади
 та
та
 .
Порядок визначення наступний.
Теодоліт встановлюють на тверду основу
стійко, щоб один із підіймальних гвинтів
підставки був спрямований на добре
видимий предмет. Далі робимо перевірку
дослідного рівня, старанно досягаючи
перпендикулярності його осі до осі
обертання теодоліту. Наводимо зорову
трубу на віддалений предмет і робимо
відлік
по вертикальному кругу.
Обертаємо навідний гвинт труби, нахиляємо
її на обраний кут υ і
робимо
відлік
по вертикальному кругу, який
повинний дорівнювати
.
Порядок визначення наступний.
Теодоліт встановлюють на тверду основу
стійко, щоб один із підіймальних гвинтів
підставки був спрямований на добре
видимий предмет. Далі робимо перевірку
дослідного рівня, старанно досягаючи
перпендикулярності його осі до осі
обертання теодоліту. Наводимо зорову
трубу на віддалений предмет і робимо
відлік
по вертикальному кругу.
Обертаємо навідний гвинт труби, нахиляємо
її на обраний кут υ і
робимо
відлік
по вертикальному кругу, який
повинний дорівнювати
= + υ . (4.3)
Кут υ приймається для точних теодолітів в межах 20′ - 1°. Далі діючі переднім підіймальним гвинтом, знову наводимо зорову трубу на той же самий предмет, схиляємо площину лімба і вертикальну вісь теодоліта на кут υ .
Обертаємо
алідаду і установлюємо бульбашку рівня
в крайнє положення ампули. Відлічуємо
по шкалі рівня по обох кінцях бульбашки
і
і по горизонтальному кругу
 Знову обертаємо алідаду
і зміщаємо до іншого кінця ампули,
відлічуємо по кінцях бульбашки
і
і по горизонтальному кругу
.
Ціну поділки рівня
Знову обертаємо алідаду
і зміщаємо до іншого кінця ампули,
відлічуємо по кінцях бульбашки
і
і по горизонтальному кругу
.
Ціну поділки рівня
 визначаємо за формулою
визначаємо за формулою
=
 , (4.4)
, (4.4)
де
 =
-
-
різниця відлікові по горизонтальному
кругу;
- число поділок, на які перемістилася
бульбашка з першого положення в друге;
υ – (20′ - 1°) – кут нахилу площини лімба
, який в розрахунку підставляють у
секундах;
=
-
-
різниця відлікові по горизонтальному
кругу;
- число поділок, на які перемістилася
бульбашка з першого положення в друге;
υ – (20′ - 1°) – кут нахилу площини лімба
, який в розрахунку підставляють у
секундах;
 = 206265″.
= 206265″.
Потім спостереження повторюємо при іншому положенні алідади, повертаючи іі на 180° довкола вертикальної осі теодоліта.
Приклад запису спостережень і визначення наведено в табл.4.2.
Таблиця 4.2.
№ при йо ма |
1 положення алідади |
2 положення алідади |
||||||
Відлік |
Відлік |
|||||||
По рівню, діл. |
По горизонтальному кругу |
По рівню, діл |
По горизонтальному кругу |
|||||
|
|
0.5
|
|
|
0.5 ) |
|||
1 |
2,2 |
-0,3 |
0,95 |
105°30′21″ |
0,2 |
-2,4 |
-1,1 |
107°04′33″ |
2 |
2,3 |
-0,2 |
1,05 |
285°30′52″ |
0,3 |
-2,2 |
-0,95 |
1287°05′12″ |
Від ліки по вертикальному кругу = 178°31′25″; υ = 20′ ; = 178°11′25″ |
||||||||
 )
)
 = 0,95 + 1,1 = 2,05.
= 0,95 + 1,1 = 2,05.
 1,05 + 0,95 = 2,0.
1,05 + 0,95 = 2,0.
 = 107°04′33″ - 105°30′21″ = 1°34′12″.
= 107°04′33″ - 105°30′21″ = 1°34′12″.
 = 287°05′12″ - 285°30′52″ = 1°34′20″.
= 287°05′12″ - 285°30′52″ = 1°34′20″.
=
 = 15,9″.
=
= 15,9″.
=
 = 16,3″.
= 16,3″.
= 0,5 ( + ) = 0,5 (15,9 + 16,3 ) = 16,1″.
Нормативне значення ціни поділки дорівнює 15″.
4.3. Компенсатори нахилу.
Сьогодні геодезичні прилади з рівнями поступилися само установчим приладам. В них використовується пристрій за назвою - компенсатор нахилу. Прилад приводиться у робочий стан за допомогою лише установчого сферичного рівня, а лінія візування установлюється горизонтально, або вертикально автоматично за допомогою компенсатора нахилу.
4.3.1. Принцип компенсації нахилу. Класифікація компенсаторів.
Для того,щоб
горизонтальний промінь при нахилені
зорової труби проходів через горизонтальну
нитку сітки ниток, необхідно перемістити
перехрестя сітки ниток з положення С
у положення
 (рис.4.7) , або змінити напрямок візирного
променя так щоб він перетнув горизонтальну
нитку сітки ниток (рис.4.8, рис.4.9) .
(рис.4.7) , або змінити напрямок візирного
променя так щоб він перетнув горизонтальну
нитку сітки ниток (рис.4.8, рис.4.9) .
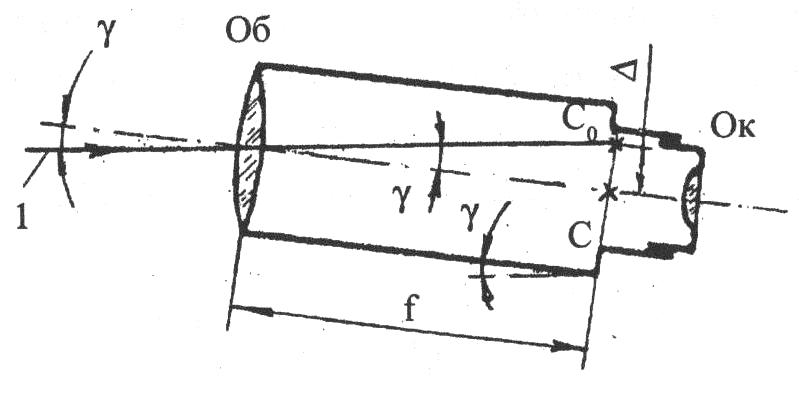
Рис. 4.7. Положення горизонтального променя у нахиленій зоровій трубі : 1 – горизонтальний промінь.

Рис.
4.8. Компенсація нахилу зорової труби
переміщенням сітки ниток : 1 – горизонтальний
промінь .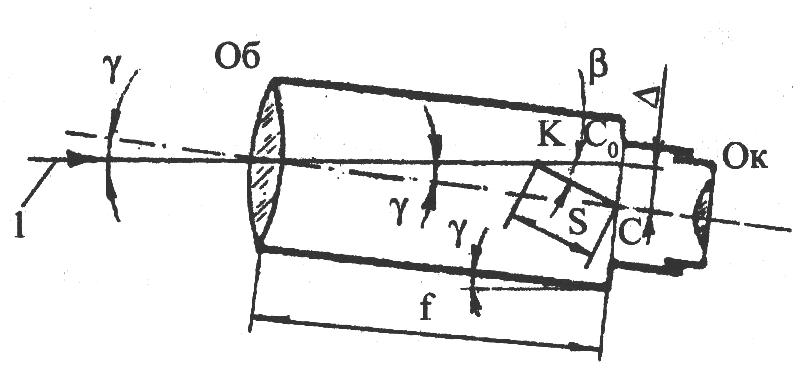
Рис. 4.9. . Компенсація нахилу зорової труби відхиленнями візирної осі: 1 – горизонтальний промінь.
Переміщення сітки ниток або зміщення візирного променя здійснюють автоматично за допомогою розташованого у точці К пристрою – компенсатора нахилу. В обох випадках сітка ниток або візирний промінь переміщаються на величину ∆, яка дорівнює (рис.4.8 і 4.9).
∆ =

 S
.
(4.5)
Компенсатор - К
розташовують у середині зорової труби,
тому він матиме не великі розміри та
масу. Загалом компенсатор – це пристрій,
який змінює положення лінії візування,
зокрема встановлює її горизонтально.
Компенсатор містить
рухомий елемент, який займає певне
положення під дією сили тяжіння, нерухомий
оптичний елемент (призму) і пристрій
демпфування повітряного, магнето -
індуктивного або рідинного способу
дії. Залежно від типу рухомого елементу
компенсатора умовно поділяють на
механічні , оптико – механічні і рідинні.
Оптико – механічні
компенсатори (маятникові) застосовують
найчастіше в геодезичних приладах ,
вони мають вільно підвищені дзеркала
, призми або лінзи. Простими та поширеними
є компенсатори, в яких використовують
вільно підвищені з можливістю погойдування
плоскі дзеркала. Відомо, що під час
повороту плоского дзеркала на кут γ,
відбитий промінь повертається відносно
початкового напря мку на кут 2γ.
S
.
(4.5)
Компенсатор - К
розташовують у середині зорової труби,
тому він матиме не великі розміри та
масу. Загалом компенсатор – це пристрій,
який змінює положення лінії візування,
зокрема встановлює її горизонтально.
Компенсатор містить
рухомий елемент, який займає певне
положення під дією сили тяжіння, нерухомий
оптичний елемент (призму) і пристрій
демпфування повітряного, магнето -
індуктивного або рідинного способу
дії. Залежно від типу рухомого елементу
компенсатора умовно поділяють на
механічні , оптико – механічні і рідинні.
Оптико – механічні
компенсатори (маятникові) застосовують
найчастіше в геодезичних приладах ,
вони мають вільно підвищені дзеркала
, призми або лінзи. Простими та поширеними
є компенсатори, в яких використовують
вільно підвищені з можливістю погойдування
плоскі дзеркала. Відомо, що під час
повороту плоского дзеркала на кут γ,
відбитий промінь повертається відносно
початкового напря мку на кут 2γ.
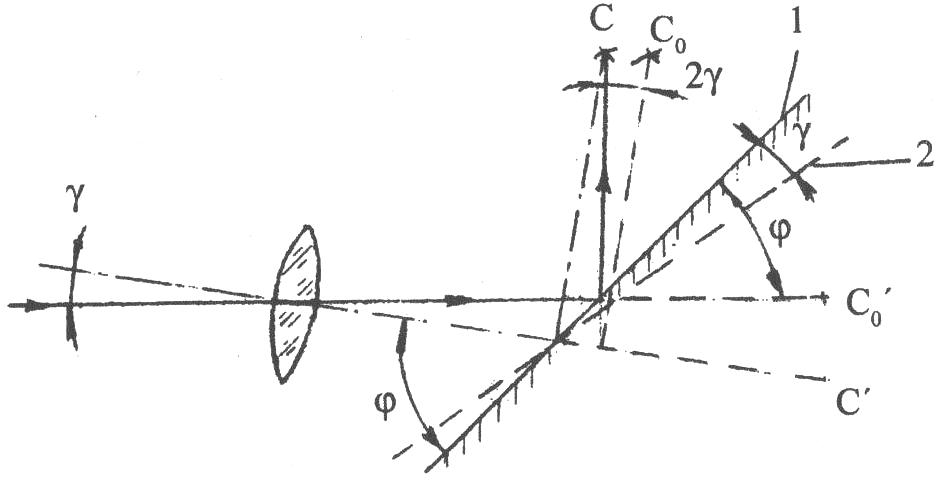
Рис. 4.10. Схема компенсатора із дзеркалом , що коливається: 1 – положення дзеркала , коли зорова труба горизонтальна; 2 - положення дзеркала, коли візирна вісь зорової труби нахилена.
Якщо дзеркало як маятник має постійний кут нахилу до горизонту φ, воно по суті має компенсатор, в якому фокусна віддаль об’єктива f = 2S а кутове збільшення компенсатора n = f / S = 2 (рис.4.10).
4.3.2. Оптико - механічні компенсатори.
Одним із прикладів роботи компенсатора є оптико - механічна схема нівеліра Н3К (рис.4.11) .
На нитках , що перехрещуються , підвішена призма. В точках А і В нитки підвішування закріплені до тримача рухомої прямокутної призми. Кутове збільшення компенсатора n =3.
Повної компенсації досягають, підбираючи оптимальні розміри і S (рис.4.11), рахуючи еквівалентну фокусну віддаль f . Коливання підвішеної призми гальмує демпфер повітряного способу дії .
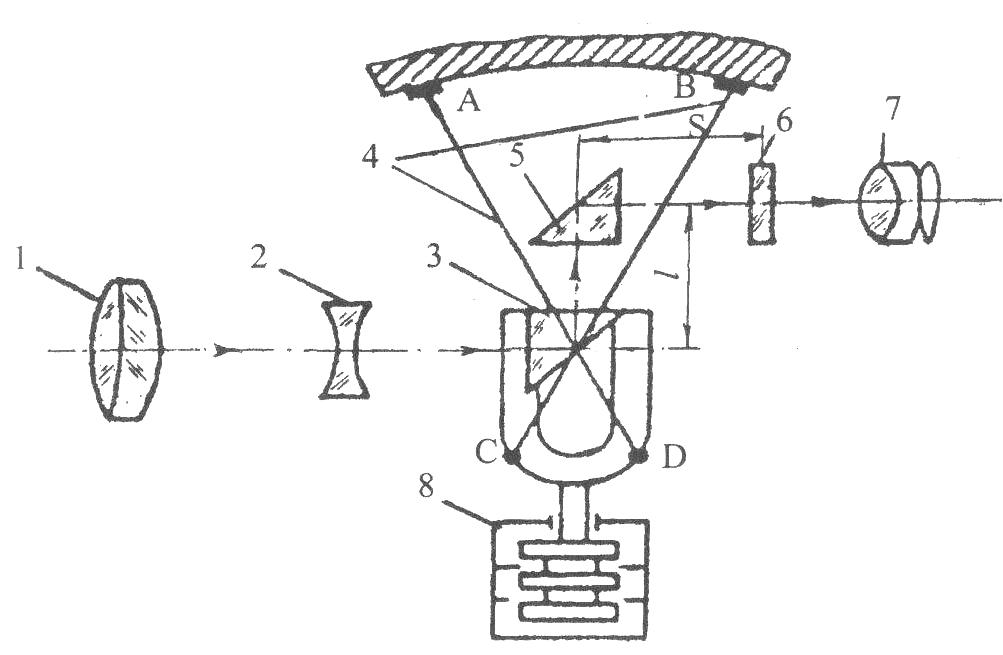
Рис.4.11. Оптико – механічна схема нівеліра Н-3К з компенсатором з призмою: 1 – об’єктив, фокусу вальний компонент, 3 – призма компенсатор , 4 – берилові нитки підвішування; 5 – призма; 6 – сітка ниток; 7 – окуляр, 8 - демпфер повітряного типу дії .
. 4.3.3.Дослідження компенсатора нахилу нівеліра.
Розглянемо польові випробування компенсаторів нахилу само - установчих нівелірів.
Вони виконуються з метою установити діапазон дії компенсатора , його чутливість та похибку компенсації кутів нахилу .
Діапазон дії компенсатора – це максимально номінальний кут нахилу вертикальної осі приладу, який не збільшує нормовану для цього типу компенсатора похибку само установлення лінії візування.
У польових умовах похибку компенсації кутів нахилу визначають порівнянням виміряного перевищення між двома точками за різнойменних однакових кутах поздовжнього і поперечного нахилу осі обертання нівеліра.
Для нівелірів , призначених для нівелювання I i II класу (високоточні прилади), дослідження виконують , коли віддалі між рейками становлять
10, 50 і 100м.
Для нівелірів, призначених для нівелювання III i IV класів (точні прилади) – віддалі між рейками становлять
50, 100 і 140 м.
Положення бульбашки сферичного рівня нівеліра при випробуванні показано в табл. 4. 3.
Таблиця 4.3.
№ дій |
Вимірювання перевищень. |
Положення бульбашки рівня. |
1 |
Бульбашка рівня в нуль – пункті ( γ = 0 ). |
Бульбашка у центрі ампули. |
2 |
Поздовжній нахил осі обертання (об`єктив догори ) на кут( + γ). |
Між кругами ампули в напряму об`єктива . |
3 |
Поздовжній нахил осі обертання (об`актив донизу ) на кут( - γ). |
Між кругами ампули в напряму окуляра. |
4 |
Поперечний нахил на кут (+ γ). |
Між кругами ампули ліворуч від напряму окуляр - об`актив. |
5 |
Поперечний нахил на кут (+ γ). |
Між кругами ампули праворуч від напряму окуляр - об`актив. |
Дані випробування компенсатора нахилу нівеліра Н3К .
4.3.4.Порядок визначення діапазону дії компенсатора нахилу.
Спочатку на віддалі між рейками 50 м нівелір встановлюють у створі двох рейок посередині між ними так, щоб один із підіймальних гвинтів був у створі рейок, які встановлюють у рейко - тримачах. Нівелір приводять в робочий стан, установлюють бульбашку рівня у нуль – пункт ( положення 1 табл.4.3) і вимірюють перевищення між точками встановлення рейок. Поздовжні нахили нівеліра ( положення бульбашки 2 і 3 табл.4.3) встановлюють двома іншими підіймальними гвинтами. Вимірювання виконують серіями, загальна кількість яких дорівнює п`яти. Висоту приладу змінюють поперед кожної серії.
В такий же послідовності роблять спостереження при віддалях 100 і 140 м.
Середні перевищення одержані при положеннях рівня 2, 3, 4 і 5 (табл.4.3) не повинні відрізнятися від середнього перевищення, яке визначене при положенні рівня 1 в нуль – пункті (табл.4.3) по всіх віддалях на 3 -5 мм при нівелюванні відповідно IV класу і технічного. Якщо розходження більше 5 мм, то нівелір необхідно юстувати у майстерні. У процесі полових робіт похибки за декомпенсацію визначають також періодично через кожні 2 – 3 місяця на віддалі 100 м.
4.4. Компенсатор вертикального круга теодоліта.
Теодоліти, які обладнані компенсаторами нахилу на вертикальному крузі мають значну перевагу перед теодолітами з рівнем вертикального круга. Перевага перших очевидна. Спостерігачеві не потрібно установлювати бульбашку рівня на середину щоб відлічити вертикальний круг.
Принцип
дії компенсаторів вертикальних кругів
такий же самий , як і компенсаторів
нівелірів. Елемент підвішування оптичної
деталі або системи займає прямовисне
положення , компенсуючи невеликі кути
відхилення від нього вертикальної осі
приладу. Компенсатор автоматично
приводить місце нуля вертикального
круга до нуля. На рис.4.12 подано принципову
схему дії компенсатора вертикального
круга теодолітів 3Т2КП і 3Т5КП (УОМЗ
РФ). Головним елементом
компенсатора є призма П з дахом А к
Р – 90. Така призма зміщує зображення у
бік, протилежний до напрямку її руху
на величину вдвічі більшу від зміщення
самої призми. Цю властивість призми
використовують для компенсації
відхилення вертикальної осі теодоліта
від прямовисного положення.
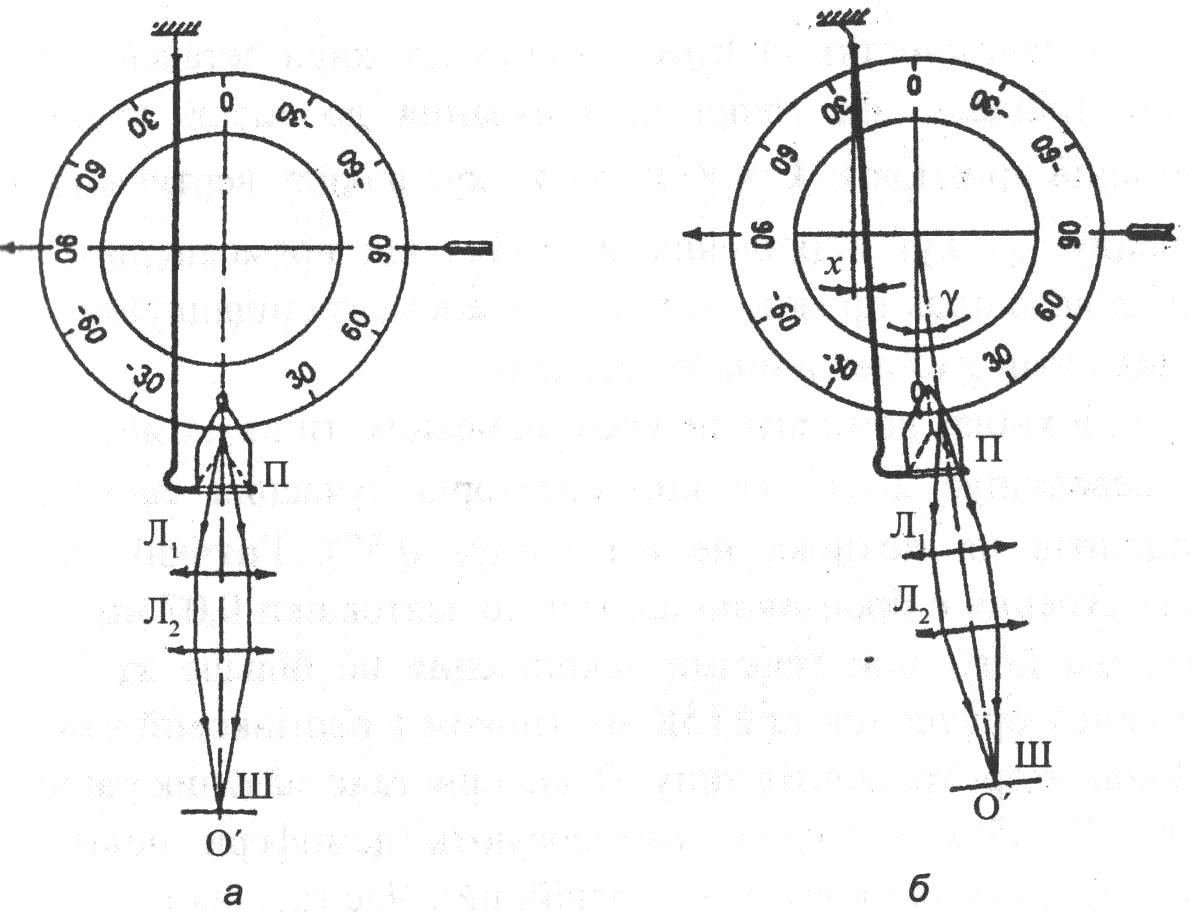 Рис.4.12.
Схема дії компенсатора теодолітів типу
3Т2КП
і
3Т5КП:
а – вертикальна вісь приладу прямовисна;
б - вертикальна вісь приладу нахилена
на кут γ.
Рис.4.12.
Схема дії компенсатора теодолітів типу
3Т2КП
і
3Т5КП:
а – вертикальна вісь приладу прямовисна;
б - вертикальна вісь приладу нахилена
на кут γ.
На рис.
4.12 позначено: 1 – гнучко вий елемент
підвішування;
 кут відхилення пружного маятника від
прямовисного положення ; γ
– кут нахилу вертикальної осі приладу;
2 – демпфер повітряного типу.
кут відхилення пружного маятника від
прямовисного положення ; γ
– кут нахилу вертикальної осі приладу;
2 – демпфер повітряного типу.
Похибка компенсації не перевищує 2 -1″. Демпфер 2 має повітряний тип дії. Час гасіння коливань не перебільшує 2″.
4.5. Випробування роботи компенсатора вертикального круга.
Метою випробування є визначення діапазону роботи компенсатора при якому він забезпечує правильний відлік по вертикальному кругу.
4.5.1. Визначення діапазону роботи компенсатора по напрямку лінії візування.
Випробування проводимо у наступному порядку. Встановлюємо прилад на штатив так, щоб лінія двох підіймальних гвинтів підставки була перпендикулярна до лінії візування на добре видиму ціль. Старанно приводимо вісь обертання теодоліта у прямовисне положення, наводимо зорову трубу на ціль і беремо відлік N по вертикальному кругу.
За допомогою навідного гвинта труби установлюємо на вертикальному крузі відлік, рівний N +1′. При цьому зображення цілі зійде з центру сітки ниток. Повертаємо підіймальний гвинт, розташований по напряму лінії візування, суміщаємо зображення цілі з центром сітки ниток. Таким чином нахиляємо вісь обертання теодоліта на кут рівний 1′. Беремо відлік по вертикальному кругу .
Далі
послідовно установлюємо навідним
гвинтом труби на вертикальному крузі
відлік рівний
 1′,
кожного разу суміщаємо поворотом
підіймального гвинта підставки
зображення цілі з центром сітки ниток
і беремо від ліки по вертикальному кругу
1′,
кожного разу суміщаємо поворотом
підіймального гвинта підставки
зображення цілі з центром сітки ниток
і беремо від ліки по вертикальному кругу
 .
.
Ці дії повторюємо до тих пір, поки відлік по вертикальному кругу не будуть відрізнятися на 1 - 2′ від початкового відліку .
Після цього знову приводимо вісь обертання теодоліта у прямовисне положення і виконуємо другу серію спостережень, схиляючи вісь обертання приладу у протилежний напрямок, тобто установлюємо кожного разу навідним гвинтом на вертикальному крузі відлік рівний N -1′.
Потім переводимо трубу через зеніт і повторюємо дві серії спостережень при іншому положенні круга.
4.5.2. Визначення впливу бокового нахилу теодоліта на точність роботи компенсатора.
Порядок визначення такий.
Встановлюємо теодоліт на штативі з рахунком , щоб один із підіймальних гвинтів розташувався у напрямку візирної цілі і приводимо вісь обертання теодоліта в прямовисне положення. Наводимо трубу на першу візирну ціль і беремо відлік N по вертикальному кругу.
Обертаємо
алідаду горизонтального круга на 90°
і наводимо трубу на другу чітку ціль,
беремо відлік по вертикальному кругу
 .
.
За
допомогою навідного гвинта зорової
труби установлюємо на вертикальному
крузі відлік рівний
 .
.
Зображення при цьому другої цілі зміститься.
Обертаннями
одного із підіймальних гвинтів,
розташованих по напрямку лінії візування,
суміщаємо зображення другої точки з
центром сітки ниток, тобто схиляємо
вісь обертання теодоліту в бічному
напрямку на кут рівний
 .
.
Обертаємо алідаду до початкового напрямку і наводимо трубу на першу точку, відлічуємо по вертикальному кругу .
Далі
вказані дії повторюємо декілька разів,
послідовно установлюючи на вертикальному
крузі при візуванні на другу точку
відлік рівний
 1′
до тих пір, коли відлік
по вертикальному кругу при наведенні
труби на першу точку не буде відрізнятися
на 1 -2′ від значення початкового
відліку N
.
1′
до тих пір, коли відлік
по вертикальному кругу при наведенні
труби на першу точку не буде відрізнятися
на 1 -2′ від значення початкового
відліку N
.
Після
цього знову приводимо вісь обертання
теодоліта в прямовисне положення і
виконуємо другу серію спостережень,
нахиляючи вісь обертання теодоліта у
протилежну сторону, тобто встановлюємо
при візуванні на другу точку відлік
 1′.
1′.
Приклад визначення впливу бокового нахилу теодоліта наведено у табл.4.4.
Таблиця 4.4. Випробування компенсатора теодоліта 3Т5КП № 3443.
№ серії |
№ спо- стережен-ня |
Нахил осі ′ |
Відлік по вертикальному кругу |
|||||||||||||||
К П |
КЛ |
|||||||||||||||||
° |
′ |
v |
100
|
° |
′ |
v |
100 |
|||||||||||
1 |
1 2 3 4 5 6 |
0 1 2 3 4 5 |
179 |
56,8 56,6 56,8 56,6 56,7 56,8 |
0,1 -0,1 0,1 -0,1 0 0.1 |
1 1 1 1 0 1 |
0 |
03,503,403,603,403,603,5 |
0 -0,1 0,1 -0,1 0,1 0 |
1 1 1 1 1 1 |
||||||||
2 |
1 2 3 4 5 |
0 -1 -2 -3 -4 |
179 |
56,7 56,6 56,8 56,7 56,7 |
0 -0.1 0,1 0 0 |
0 1 1 0 0 |
0 |
03,603,603,503,403,5 |
0,1 0,1 0 - 0,1 0 |
1 1 1 1 1 |
||||||||
100 Σ = |
7.0 |
100 Σ = |
7.0 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||

Примітка до таблиці 4.4:
1. Зміна відліку по вертикальному кругу робиться при нахилі теодоліта на кут більше +6′ - це перша серія і на кут (- 5′) - це друга серія, тобто межа контролю роботи компенсатора склала нахил ±5.
2. Сусідні відлікові із спостережень 1 і 2 серій дорівнюють: КП =179°56,7′ і КЛ =0°03,5′, кількість спостережень n= 22.
3. Середня квадратична похибка визначення діапазону роботи компенсатора склала
 =
=
 = 0,08′.
= 0,08′.
4.6.Порядок виконання лабораторної роботи.
1. Нарисуйте схему (або надрукуйте ксерокопію) циліндричних і сферичного рівнів та способи їх закріплення в оправі теодоліта . Опішите конструкцію цих рівнів.
2. Опишіть принцип компенсації нахилу осі нівеліра компенсатором.
3. Нарисуйте оптико – механічну схему компенсатора нівеліра Н3К або надрукуйте його ксерокопію. Опішите цю схему.
4. Визначите ціну поділки рівня теодоліта 3Т2КП.
5. Визначите діапазон роботи компенсатора вертикального круга теодоліта 3Т2КП по напрямку лінії візування на ціль.
6. Дайте висновок про роботу циліндричного і сферичного рівнів та про діапазон роботи компенсатора вертикального круга теодоліта 3Т2КП.
4.7. Контрольні запитання.
1. Як класифікують рідинні рівні за формою і точністю?
2. Що таке ціна поділки рівня і як її визначають?
3. Які конструктивні елементи використовують для збереження точності і чутливості рідинного рівня в залежності від зміни температури?
4. Розповість про порядок визначення ціни поділки рівня нівеліра?
5. Що являє собою компенсатор нахилу візирної осі приладу, з яких елементів він складається?
6. Який порядок випробування компенсатора нахилу нівеліра Н3К?
7. Як визначають діапазон роботи компенсатора вертикального круга теодоліта 3Т2КП?
8. Як визначають вплив бокового нахилу теодоліта на точність роботи компенсатора вертикального круга?
Лабораторна робота № 5.
Вивчення конструкції і основних метрологічних характеристик осьових систем теодолітів.
Мета роботи: вивчити конструктивні особливості осьових систем технічних і точних теодолітів, визначити ексцентриситет алідади горизонтального круга теодоліта 3Т2КП.
5.1. Осьові системи теодолітів.
Осьові системи є визначальними для взаємного розташування оптико – механічних вузлів теодоліта. Вони забезпечують збереження необхідних спряжень геометричних осей приладу під час виконання вимірювань, при збереженні і транспортуванні.
За формою осьові системи можуть бути конічними і циліндричними, а за призначенням і розташуванням – вертикальні і горизонтальні.
Деталі вертикальної і горизонтальної осьових систем геодезичних приладів є дуже відповідальними і виготовляють їх з найвищою точністю. Від зазору в осьових парах (вісь - втулка), матеріалу виготовлення, якості механічної та термічної обробки значною мірою залежить точність і довговічність приладу.
Радіальний зазор між спряженими деталями вісь – втулка вертикальної осьової системи становить 0,0005 – 0,001 мм, незбіжність осей обертання алідади і горизонтального круга не перевищує 0,002 мм.
Граничні відхилення від правильної форми мають бути не більшими, ніж 0,0005 мм. Зазор в осьовій системі є мінімальним, але таким, щоб можливо втримувати шар мастила завтовшки 0,0005 мм.
Щоб забезпечити легкість ходу та стабільність системи, осі мають бути достатньої довжини. Довжина осі 𝓁 , зазвичай у 3 – 4 рази більше її діаметра d , а загалом 𝓁 = 2r , де r – радіус горизонтального круга.
В сучасних геодезичних теодолітах застосовують повторювальні вертикальні системи з поворотним кругом.
На рис.5.1,а подано схему повторювальної системи осей з рухомою втулкою алідади
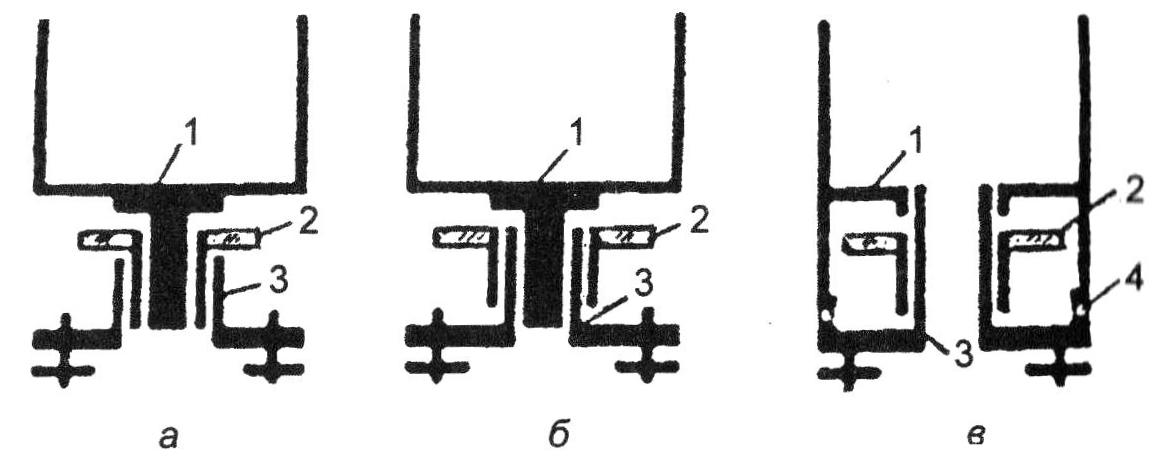
Рис. 5.1, а,б,в. Схеми вертикальних осьових систем : а – повторювальна система осей з рухомою втулкою алідади (система осей Рейхенбаха ), б – осьова система з нерухомою втулкою алідади (система осей Борда) , в – осьова система , в якої круг і алідада обертаються довкола однієї і тієї самої поверхні нерухомої втулки (система осей Репсольда ); 1 – алідада , 2 – круг , 3 – втулка , 4 - розвантажувальні кульки .
Вісь круга 2 обертається у втулці 3 підставки і одночасно є втулкою осі алідади 1. Недоліком цієї системи є ймовірність захоплення та ведення круга алідадою під час її обертання. Таку систему осей використовують звичайно у технічних теодолітах типу Т30 , 2Т30,4Т30. Її називають системою осей Рейхенбаха .
На рис.5.1,б зображено схему вертикальної осьової системи з нерухомою втулкою алідади – система осей Борда. У створі нерухомої втулки 3 обертається вісь алідади 1. Круг 2 обертається довкола зовнішньої поверхні втулки 3 . Внутрішня і зовнішня поверхні втулки концентричні. Круг та алідада не дотикаються один до одної , що виключає ймовірність захоплення круга алідадою . Проте система осей з нерухомою втулкою алідади потребує досконалої технології виготовлення, щоб досягти точної концентричної внутрішньої і зовнішньої поверхонь втулки і виключати ексцентриситет алідади і круга . Така система може бути повторювальною з поворотним кругом і застосовується в точних теодолітах типу Т5, 2Т5,Т2, 2Т2 (УОМЗ РФ) , Theo 010 (Carl Zeiss Iena) тощо.
Схема вертикальної осьової системи, що має спрощене центрування осей лімба і алідади, наведена на рис.5.1,в і називається системою осей Репсольда. Алідада 1 і круг 2 обертаються довкола однієї і тієї поверхні втулки 3. Тиск від алідадної частини передається периферійно через розвантажувальні кульки 4, тому стабільність осьової системи підвищується. Зазвичай, цю систему з поворотним кругом застосовують у високоточних теодолітах.
Застосування тієї чи іншої осьової системи зумовлено способом вимірювання кута. Наприклад, коли значення вимірюваного кута обчислюють як різницю відліку круга, у такого приладу треба досить нерухомо закріпляти круг на втулці осьової системи.
Під час вимірювання кутів способом повторень кут, що вимірюють, багаторазово послідовно відкладають на крузі. Для цього використовують осьову систему, що дає змогу обертати алідаду як самостійно, так і разом з кругом. Для цього осьова система містить спеціальний, так званий, повторювальний пристрій, який дає змогу легко скрипить круг з алідадою. Теодоліти, в яких передбачена можливість переставляти круг, обладнані пристроєм у вигляді системи зубчастих коліщаток, за допомогою якої можна повертати круг незалежно від інших частин приладу. Це дає змогу виконувати вимірювання способом прийомів, кругових прийомів, в усіх комбінаціях, використовувати щоразу різні ділянки шкали круга, наприклад в точних теодолітах 3Т2КП і 3Т5КП.
Окрім описаного конструктивного поділу, вертикальні осьові системи поділяють за ознаками видів тертя в парах на ти, що мають тертя ковзання, кочення та комбіновані.
Звичайно, досконалішими є два останні типи систем.
В сучасних оптичних теодолітах використовуються циліндричні осі (раніше використовували конусні осі), які сьогодні стали найпоширенішими.
Перед конусними вони мають істотні переваги, а саме: відсутнє навантаження на бічні поверхні осей, не потрібне трудомістке регулювання ходу і часте змащення, осі стабільно працюють впродовж тривалого часу без спеціального догляду.
В циліндричних осях бічна поверхня втулки слугує лише напрямною, а навантаження алідадної частини приладу сприймають упори, підп`ятники, підшипники кочення тощо.
Схеми деяких різновидів конструкції циліндричних осей подано на рис.5.2, зокрема у конструктивної розробці
(рис.5.2,а) навантаження сприймають заплічики,
(рис5.2,б) - сферичний торцевий упор,
(рис5.2,в) – підшипник кочення.
Схеми конкретних конструктивних розробок вертикальних осьових систем теодолітів наведені на рис.5.3.
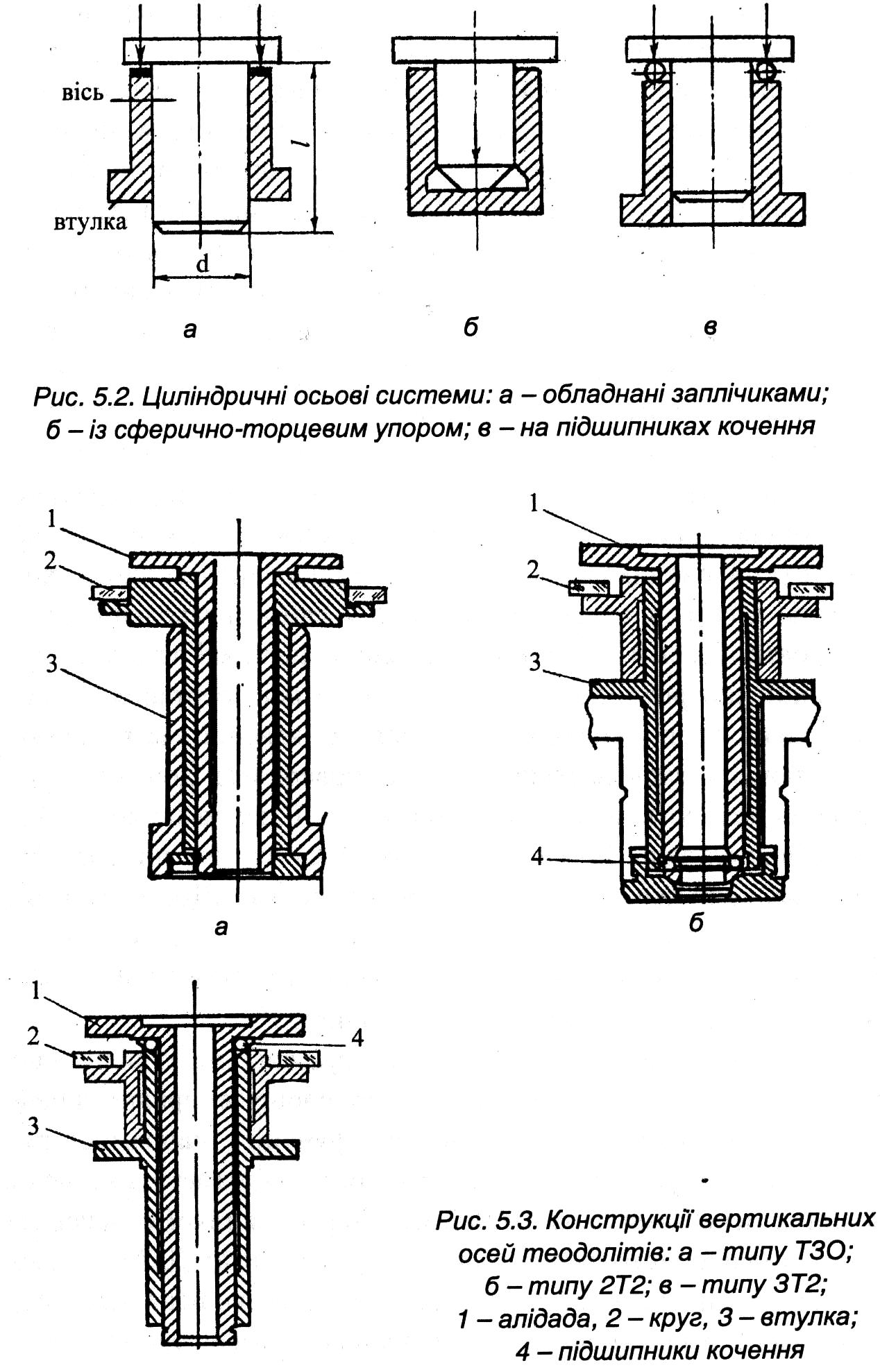
На рис. 5.3,а подано схему вертикальної осьової системи теодолітів типу Т30, 2Т30, 4Т30. Це повторювальна система осей з рухомою втулкою алідади. На рис.5.3, б зображено схему вертикальної осьової системи з нерухомою втулкою алідади теодолітів 2Т2, 2Т5К. Алідадна частина спирається торцем осі алідади на високоточний шарикопідшипник. На помість у теодолітах 3Т2КП, 3Т5КП (рис.5.3,в) у такій самій системі осей застосовано схему розвантаження через кульки у верхній частині осі алідади. Тому схему вважають досить досконалою. Її називають саморегульованою.
Рівномірність і плавність обертового руху вертикальних осьових систем є необхідною умовою точності вимірювань. Конструкція вертикальних осей сучасних приладів та застосування відповідного змащування достатньою мірою забезпечують цю умову. Разом з тим, щоб зменшити площу контакту пари вісь – втулка, зазвичай вдаються до проточування внутрішньої поверхні втулки завглибшки 0,3 – 0,5 мм. У результаті вісь та втулка дотикаються одна до одної тільки вузькими поясками.
Наявність необхідного радіального зазору між спряженими деталями вісь – втулка в осьових системах навіть якісного виготовлення спричиняє коливання осей до 2 - 4″ від середнього положення. Застосування осьової системи саморегульованої конструкції викликано необхідністю підвищення точності вимірювань. Опорою алідадної частини у саморегульованій (само центрованій) осьовій системі є сталеві кульки, які встановлені на поверхні, що розташована під кутом до осі обертання алідади. Під дією ваги алідадної частини і власної ваги кульки, намагаючись скочуватися з похилої поверхні донизу, з усіх боків охоплюють вісь, перешкоджаючи її коливанням під час обертання алідади. Внизу вісь дотикається втулки лише вузьким пояском, який керує її рухом у нижній частині. Щоб забезпечити належну стійкість осі під час обертання алідади, різниця діаметрів кульків не повинна перевищувати 0,0005 мм. У такій осьовій системі коливання не перевищує 1″ . Зменшенню коливання осей слугує система з віднесеною опорою на кульки , в якій роз поширено площу спирання алідади. Власне, на вісь поліпшені функції напрямної руху алідади і центрування приладу, проте різниця діаметрів кульків не повинна перебільшувати 0,0002 мм. Необхідно відзначити, що вертикальні осьові системи теодолітів є найскладнішими за конструкцією відносно інших геодезичних приладів (нівелірів тощо).
Дослідження вертикальних осьових систем дають змогу визначити коливання осі обертання, нахил осі і зазор між спряженими елементами осьової системи. Вимірювання виконують за допомогою рівня, який має ціну поділки не більше від 5″. Рівень закріплюють на алідаді, встановлюють вертикальну вісь приладу прямовисно, а перпендикулярність осі рівня до осі обертання алідади не повинна перебільшувати 0,5 поділки рівня.
Алідаду переставляють через 30° і фіксують відліки кінців бульбашки рівня у межах двох обертів алідади за напрямком руху годинникової стрілки, а двох у зворотному напрямку. Обчислюють зміну нахилу осі рівня, будують графік відхилень, а за ним визначають величину коливань осі.
Горизонтальна осьова система не тільки за назвою і призначенням, а й за конструкцією відрізняється від вертикальної. Вона слугує для обертання зорової труби. У теодолітах горизонтальна осьова система (рис.5.4,а)
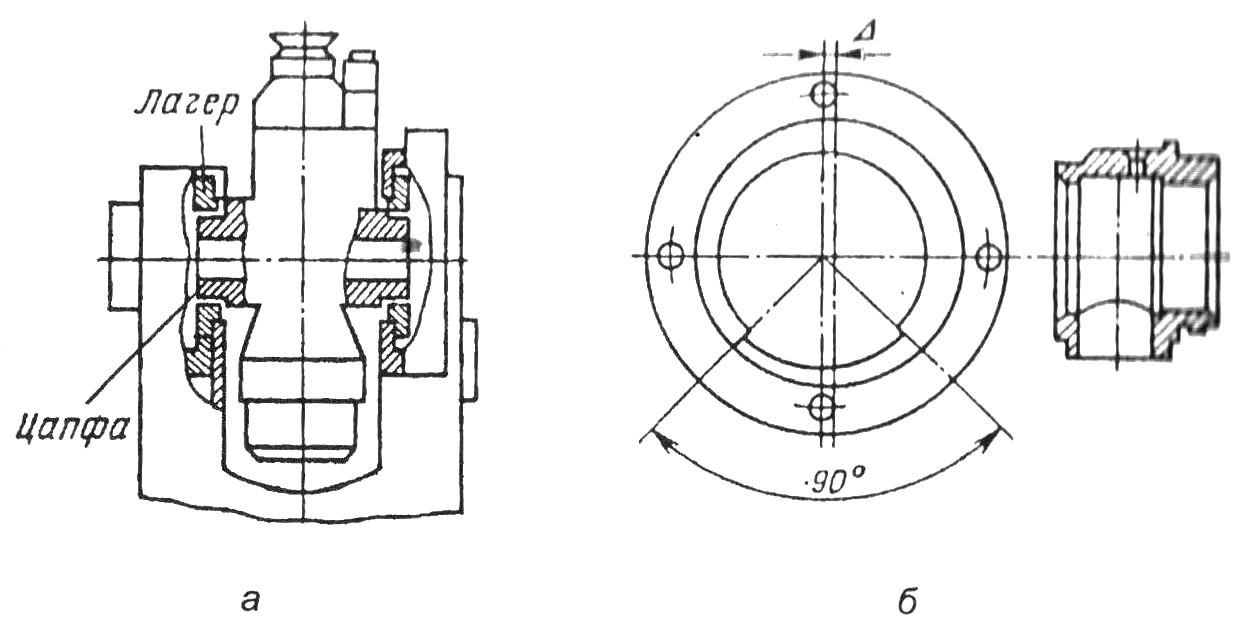
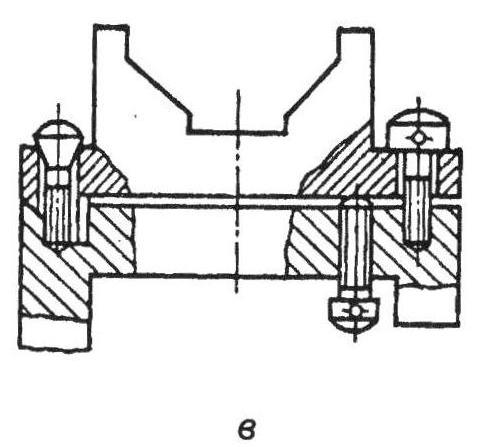
Рис.5.4. Горизонтальна осьова система зорової труби : а – взаємне розташування лагерів та цапф; б – циліндричний лаг ер ; в – V– подібний лагер .
складається звичайно з двох циліндричних півосей – цапф, що обертаються у лагерах, які встановлені на вертикальних колонках приладу. Із цапфами жорстко скріплені зорова труба і вертикальний круг. У сучасних теодолітів стійкість горизонтальної осі досягають за рахунок особливостей конструкції лагерів і навідного пристрою . Лагери виконують циліндричними (рис.5.4, а), або V – подібними (рис.5.4, б), конструкція яких містить виправні гвинти. Віддаль між центрами лагерів приблизно дорівнює діаметру вертикального круга. Конструкція циліндричного лаг ера дає можливість робити доволі великим зазор (0.01 – 0,03) мм між цапфою і лагером. Для того, щоб положення осі було стійким, у нинішній частині лагерів роблять заглиблення 0,1 – 0,15 мм, яке обмежене центральним кутом 90° (рис.5.4,б). Вісь отвору лагера зміщена щодо зовнішнього діаметра на величину ∆ . Це дає змогу, повертаючи лагери, встановлювати вісь обертання зорової труби перпендикулярно до вертикальної осі приладу.
Конструкція V – подібного лагера (рис.5.4,б) дає змогу змінювати висоту поверхонь спирання цапф за допомогою виправних гвинтів. Навідний пристрій зорової труби конструюють так щоб вплив на вісь сил, які можуть змінювати її азимутальне або висотне положення, був мінімальним. До стабільності горизонтальних осьових систем ставлять такі самі жорсткі вимоги, які до вертикальних. Наприклад, для високоточних теодолітів зміна положення осі обертання зорової труби не повинна перебільшувати 0,5 - 1″. У зв`язку з цим, відхилення форми цапф осі обертання зорової труби, зокрема, овальність не повинна бути більшою, ніж 0, 001 – 0,002 мм.
Дослідження горизонтальних осьових систем слугує для визначення відхилення форми цапф від колової циліндричної та нерівності їхніх діаметрів.
Якщо вимірювання на рівній поверхні, на якій невеликі кути нахилу, то досліджувати форму цапф недоцільно, якщо вимірюються кути сторони яких значно відрізняються кутами нахилу, то досліджувати форму цапф доцільно контактним або безконтактним способами.
5.2. Суть визначення ексцентриситету алідади горизонтального круга.
Вісь обертання алідади, центр поділок круга і вісь обертання горизонтального круга в теодоліті мають збігатися.
Проте у зв’язку з неминучою технічною недосконалістю виготовлення і складання деталей та вузлів виникає незбіг осей, який називається ексцентриситетом.
У сучасних точних і високоточних теодолітах лінійна величина ексцентриситету дорівнює декілька мкм.
Ексцентриситетом алідади називають незбіг центра обертання алідади з центром поділок круга.
Ексцентриситетом круга називають незбіг центра обертання круга з центром поділок круга.
Ексцентриситетом осей називають незбіг центрів обертання алідади і круга.
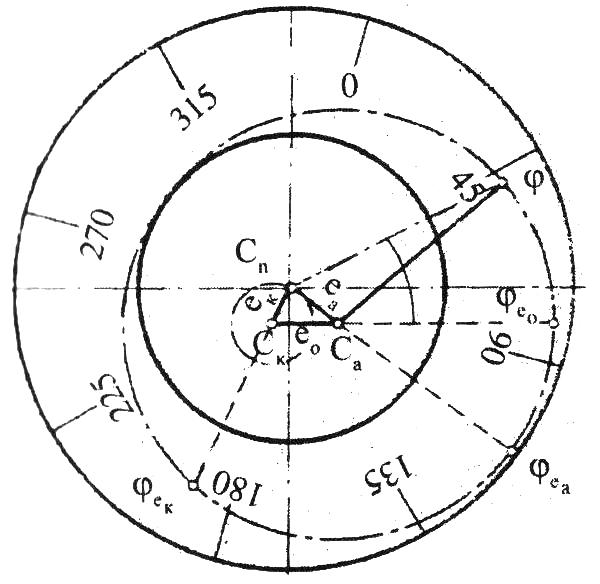
Рис.5.5. Ексцентриситет алідади і горизонтального круга .
На рис.5.5:
 - центр поділок круга,
- центр поділок круга,
 - центр обертання алідади,
- центр обертання алідади,
 - центр обертання круга.
- центр обертання круга.
Відрізок
 =
=
 - лінійний ексцентриситет алідади,
- лінійний ексцентриситет алідади,
 =
=
 - лінійний ексцентриситет круга,
- лінійний ексцентриситет круга,
 лінійний ексцентриситет осей.
Напрямок ексцентриситету
характеризують радіуси
лінійний ексцентриситет осей.
Напрямок ексцентриситету
характеризують радіуси
 – виражає ексцентриситет круга,
– виражає ексцентриситет круга,
 - виражає ексцентриситет алідади,
- виражає ексцентриситет алідади,
 - виражає ексцентриситет осей.
- виражає ексцентриситет осей.
У приладах з одностороннім відлічуванням відлік завжди спотворений впливом усіх ексцентриситетів . У приладів з двостороннім відлічуванням вплив ексцентриситету на відлік виключається, але значний ексцентриситет викликає зміну Рену на різних ділянках круга.
Якщо в теодоліті із двостороннім відлічуванням центр обертання алідади збігається з центром поділок , різниця відліків на діаметрально протилежних ділянках круга буде дорівнювати нулю, тобто
V
=
 - (
- ( +
180°) = 0. (5.1) Якщо
і
не збігаються, а початки відліків
мікроскопу розташовані під кутом
+
180°) = 0. (5.1) Якщо
і
не збігаються, а початки відліків
мікроскопу розташовані під кутом
 один до одного, різниця від ліків буде
дорівнювати
один до одного, різниця від ліків буде
дорівнювати
V = - ( ± 180°) – 2x + . (5.2) Змінюючи положення алідади на
σ
=
 ,
де
- кількість установлень, одержують
різниць відліку з двох мікроскопів. В
теодолітах з двосторонніми відліковими
пристроями для визначення V
потрібно почергово сумістити зображення
двох штрихів з одним і тим самим індексом,
відлічуючи шкалу мікрометра.
,
де
- кількість установлень, одержують
різниць відліку з двох мікроскопів. В
теодолітах з двосторонніми відліковими
пристроями для визначення V
потрібно почергово сумістити зображення
двох штрихів з одним і тим самим індексом,
відлічуючи шкалу мікрометра.
Конструкція
таких приладів не передбачає наявність
у полі зору мікроскопу такого індексу.
Тому суміщають зображення одного із
цих штрихів зі штрихом вертикального
круга. Різниця відліку має величину
 .
Кут
дорівнює куту, під яким індекс
розташований до діаметра тих штрихів,
які суміщають.
.
Кут
дорівнює куту, під яким індекс
розташований до діаметра тих штрихів,
які суміщають.
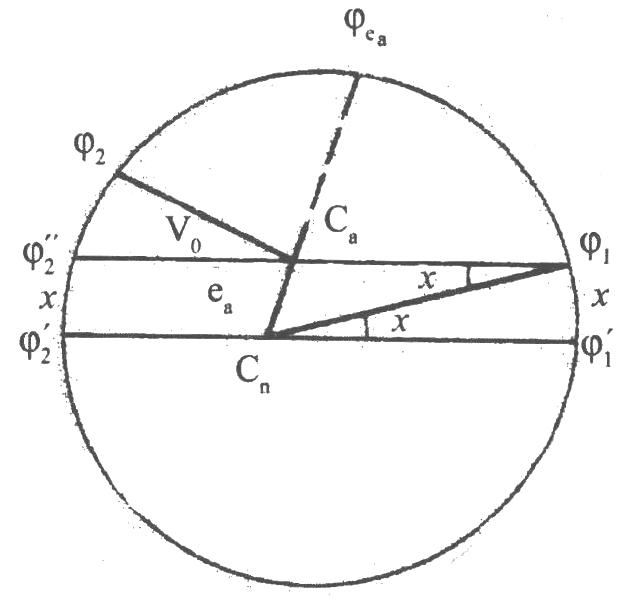
Рис.5.6 . До визначення ексцентриситету.
З
трикутника
 (рис. 5.6.) маємо
(рис. 5.6.) маємо
 =
=
 ,
(5.3)
вважаючи, що
=
,
(5.3)
вважаючи, що
= - радіус
кругу через малу величину
.
Якщо
кут
- радіус
кругу через малу величину
.
Якщо
кут
 =
-
,
=
-
,
де
-
відлік круга, коли вплив ексцентриситету
дорівнює нулю,тобто
 збігається
з напрямком лінійного ексцентриситету
, то можна записати
збігається
з напрямком лінійного ексцентриситету
, то можна записати
 =
=

 ,
(5.4)
а оскільки
,
(5.4)
а оскільки
 -
мала величина , то х
=
-
мала величина , то х
=
 =
=
=
 -
-
 .
(5.5) Підставляючи
одержане в (5.5) значення x
та з рахунком (5.2) маємо
.
(5.5) Підставляючи
одержане в (5.5) значення x
та з рахунком (5.2) маємо
V
= -
-
 +
. (5.6) Введемо позначення
+
. (5.6) Введемо позначення
 = Х і
= Х і
 = Y
(5.7)
= Y
(5.7)
і тоді маємо
 = Х
= Х
 – Y
– Y
 +
. (5.8)
+
. (5.8)
Під час
дослідження на різних ділянках кругу
можна скласти
рівнянь виду (5.8),що мають три невідомі
Х,Y і
 У складі величин V
є випадкові похибки вимірювань, тому
можна записати умовні рівняння поправок
виду
У складі величин V
є випадкові похибки вимірювань, тому
можна записати умовні рівняння поправок
виду
 = Х
= Х
 - Y
- Y
 +
-
+
-
 , (5.9)
, (5.9)
де – поправка за похибку різниці відліку V з протилежним знаком.
Згідно способу найменших квадратів від рівнянь поправок (5.9) переходимо до трьох нормальних рівнянь (за кількістю невідомих). Розв’язання цих рівнянь дозволяє отримати
Х =

 ,
Y
=
,
Y
=
 ,
=
,
=
 .
(5.10)
.
(5.10)
Із позначень Х та Y (5.7)
= arc tg
 ,
=
,
=

 . (5.11)
Максимальний вплив ексцентриситету
алідади на односторонній відлік круга
. (5.11)
Максимальний вплив ексцентриситету
алідади на односторонній відлік круга
 =
=
 , (5.12)
, (5.12)
а коли
 = 90°, тоді згідно із залежністю (5.5)
= 90°, тоді згідно із залежністю (5.5)
=
-
 .
(5.13) Величину
називають кутовим
ексцентриситетом алідади, його можна
визначити за формулою
.
(5.13) Величину
називають кутовим
ексцентриситетом алідади, його можна
визначити за формулою
=
, (5,14)
=
 . (5.15) Підставляючи
Х ,Y,
у залежність (5.9) можна визначити
значення поправок
.
. (5.15) Підставляючи
Х ,Y,
у залежність (5.9) можна визначити
значення поправок
.
5.3. Послідовність визначення ексцентриситету алідади горизонтального круга теодоліта 3Т2КП.
Послідовність визначення ексцентриситету алідади горизонтального круга теодоліта з двостороннім оптичним мікрометром наступна. Різниці визначають із елементів ексцентриситету, через кожні 30° установлення алідади від 0 до 330° у прямому ході і від 330° до 0° у зворотному ході.
На кожному установленні алідади суміщають діаметрально протилежні штрихи і фіксують відлік А (вільний від ексцентриситету алідади), а потім суміщають штрих горизонтального круга з одним із штрихів вертикального круга, який приймають за нерухомий індекс, і відлічують . Щоб побачити вертикальний штрих, повертають рукоятку перемикача кругів на 45°. Тоді у полі зору мікроскопа буде одночасно видно штрихи вертикального круга ( наприклад, у верхній половині віконця) і штрихи горизонтального круга (наприклад, у нижній половині віконця).
Послідовність дій для визначення різниць під час кожного установлення алідади, наприклад, першого на 0° така.
Маховичком оптичного мікрометра установлюють на шкалі відлік 5′00″. Навідним гвинтом алідади суміщають штрихи 0° і 180°. Потім повертають рукоятку перемикача кругів на 45° так, щоб у верхній половині віконця з`явилося зображення штрихів вертикального круга.
Далі навідним гвинтом зорової труби суміщають найближчий штрих вертикального круга з лівим біфілярним штрихом 180° і відлічують горизонтальний круг .
Зазвичай, суміщення виконують двічі маховичком оптичного мікрометра .
Надалі під час всього дослідження зорова труба залишається нерухомою, позаяк штрих вертикального круга є нерухомим індексом.
Після цього рукоятку перемикача кругів установлюють у положення “ горизонтально “ і установлюють на шкалі мікрометра відлік 5′00″.
Повертають алідаду на 30°, суміщають діаметрально протилежні штрихи і далі виконують вже раніше описані дії.
За одержаним відліком визначають коливання
= 4 (5′00″ -
 ).
(5.16)
).
(5.16)
Коливання значення для точних теодолітів не повинні перебільшувати 40″.
Для повного уявлення про ексцентриситет алідади, різниці визначають з двох прямих і двох зворотних обертів алідади. Значення , одержані за формулою (5.16), слугують вихідними даними для обчислення Х ,Y , за формулою
V
=
( ),
(5.17)
),
(5.17)
Х =
,
Y =
 ,
=
,
(5.18)
,
=
,
(5.18)
 =
=
 ,
е =
,
е =
 ,
,
 =
. (5.19)
=
. (5.19)
Ексцентриситет
 =
Х
=
Х
 + Y
+ Y
 +
. (5,20)
+
. (5,20)
Результати обчислення склали:
 = +24″, Х =
= +24″, Х = =+ 4,2″, Y=
=+ 4,2″, Y=
 = -6,4″.
= -6,4″.
tg p
=
 = 0,656, r
= 33°, р= 33°+180°= 216°,
= 0,656, r
= 33°, р= 33°+180°= 216°,
=
 = ±3,8″, е =
= ±3,8″, е =
 =
0,83 мкм.
=
0,83 мкм.
Ексцентриситет ″ = 4,2″ - 6,4″ +24″.
Таблиця 5.1.
Визначення ексцентриситету алідади
теодоліта 3Т2КП № 0015.
= 5′00″, V
= 4 ( ).
).
Установка,φ° |
|
|
|
|
V |
V
|
V
|
X |
Y |
Ексцентриситет ″ |
0 30 60 90 120 150 180 210 240 270 300 330 |
57 55 54 53 53 51 51 54 55 55 56 56 |
+12″ +20 +24 +28 +28 +36 +36 +24 +20 +20 +16 +16 |
56 55 54 53 52 52 50 53 53 54 56 57 |
+16″+20 +24 +28 +32 +32 +40 +28 +28 +24 +16 +12 |
+14″+20 +24 +28 +30 +34 +38 +26 +24 +22 +16 +14 |
0″ +10 +20,8 +28 +26 +17 0 -13 - 20,8 -22 – 13,8 - 7 |
+14″ +17,3 +12 0 -15 -29,4 -38 -22,5 - 12 0 +8 +12,1 |
0″ +2,1 +3,6 +4,2 +3,6 +2,1 0 -2,1 - 3,6 -4,2 -3,6 -2,1 |
-6,4″ -5,5 -3,2 0 +3,2 +5,5 +6,4 +5,5 +3,2 0 -3,2 -5,5 |
+17,6″ +20,6 +24,4 +28,2 +30,8 +31,6 +30,4 +27,4 +23,6 +19,8 +17,2 +16,4 |
Сума |
+290 |
+101,8 |
+63,4 |
0 |
0 |
+288 |
||||
|
-76,6 |
-101,9 |
|
|||||||
+25,2 |
-38,5 |
|||||||||
 ″
″

 ″
″


По результатах
визначення параметрів за виразами
(5.17, 5.18, 5.19, 5.20) будують графік змінювання
від кута
 .
.
5.4. Порядок визначення ексцентриситету алідади горизонтального круга теодоліта 3Т5КП .
1-й спосіб визначення включає наступні дії. Теодоліт встановлюємо на тверду основу і приводимо у робочий стан. Установлюємо алідаду на відлік, близький до нуля і, обертаючи лімб, приводимо візирну вісь труби на чітку ціль, яка знаходиться на віддалі 50 -100 м від приладу і приблизно на висоті горизонту інструмента. Беремо відлік на шкалі мікроскопа .
Переводимо
трубу через зеніт і, обертаючи алідаду,
знову наводимо візирну вісь труби на
ту саму ціль, беремо відлік
по лімбу. Потім переміщуємо алідаду її
навідним гвинтом на декілька хвилин і,
повторюючи спостереження, беремо відлік
по лімбу
 і
і
 .
.
Після цього установлюємо алідаду на відлік по лімбу близький 30° і, обертаючи лімб, наводимо візирну вісь труби на ту саму ціль. Повторюємо описаний раніше цикл спостережень і відлічуємо , , і по нерухомому лімбу при двох положеннях труби при К П і КЛ. Далі послідовно переставляємо лімб через 30° по всьому кругу і повторюємо вісь цикл спостережень при відліку, близькому 60°, 90° і т.д. По результатах відлічування обчислимо різниці
 =
(
=
( ),
(5.21)
),
(5.21)
 =
(
=
( ), (5.22)
), (5.22)
d
=
( ).
(5.23)
).
(5.23)
Потім
за отриманими різницями обчислимо
значення колімаційної похибки
С =
 (5.24)
і величини
ексцентриситету , що незалежні від
впливу колімаційної похибки для кожного
установлення алідади
=
(5.24)
і величини
ексцентриситету , що незалежні від
впливу колімаційної похибки для кожного
установлення алідади
=
 (5.25)
де
n
– кількість
середніх
піврізниць. За
значеннями
будуємо графік, на якому по осі абсцис
відкладаємо значення установлень круга
φ,
а по осі ординат значення
.
(5.25)
де
n
– кількість
середніх
піврізниць. За
значеннями
будуємо графік, на якому по осі абсцис
відкладаємо значення установлень круга
φ,
а по осі ординат значення
.
2-й спосіб визначення включає наступні дії .
Теодоліт встановлюємо на тверду основу і приводимо в робоче положення. На віддалі 20 – 30 м від приладу по колу через 45° або 60° на одній висоті з віссю обертання труби встановлюємо марки. Переставляючи алідаду за напрямом руху годинникової стрілки, при нерухомому положенні лімба, послідовно візуємо трубою при крузі право (К П) на кожну марку і відлічуємо по шкалі мікроскопа.
Переводимо
трубу через зеніт і повторюємо вимірювання
при крузі ліво (КЛ), знову обертаємо
алідаду приладу за напрямом руху
годинникової стрілки. Ці вимірювання
складають перший прийом.
Далі робимо при двох
положеннях вертикального круга другий
прийом вимірювань, обертаючи алідаду
проти руху годинникової стрілки.
Для
кожного положення алідади знаходимо
різниці від - ліків 2 =
=
 , (5.26) які обумовлені
загальним впливом подвійного
ексцентриситету 2
, (5.26) які обумовлені
загальним впливом подвійного
ексцентриситету 2 та подвійною колімаційною похибкою 2
та подвійною колімаційною похибкою 2
 .
Потім обчислимо середнє значення
подвійної колімаційної похибки
2
=
.
Потім обчислимо середнє значення
подвійної колімаційної похибки
2
=
 ,
(5.27)
,
(5.27)
де n – кількість установлень алідади. Потім визначаємо величину подвійного ексцентриситету алідади для кожного її установлення за формулою
2
=
 - 2
,
(5.28)
- 2
,
(5.28)
і ексцентриситет алідади . За значеннями будують графік ексцентриситету алідади горизонтального круга.
Таблиця 5.2
-
№ п/п
Відлік по горизонтальному кругу
2 =
 -
-

2
 2
2
Ексце- нтриситет
К П
КЛ
Прямий хід
1 2 3 4 5 6 7 8
0°02′,3 45°02′,7 90°03′,8 135°02′,3 180°00′,4 225°04′,2 270°01′,0 315°03′,2
180°02′,3 225°03′,2 270°03′,9 315°02′,4 0° 00′,8 45° 04′,6 90° 01 ′,8 135°03′,9
-0,6 -0,5 -0,1 -0,1 -0,4 -0,4 -0,8 -0,7
- 9″ - 3 +21 +21 +3 +3 -21 -15
- 4″ - 2 +10 +10 +2 +2 -10 - 8
Сума
-3,6
+48
+24
2 =
 =
=
 - 0,45′ = - 27 ″.
- 0,45′ = - 27 ″.- 48
- 24
 =
0,5 (
=
0,5 ( )
= 10″ .
)
= 10″ .0
0
Обчислимо також максимальне значення кутового ексцентриситету .
В теодолітах типу Т5 величини ексцентриситету не повинні перевищувати 30″.
Приклад визначення ексцентриситету алідади горизонтального круга теодоліта 3Т5КП наведено в табл. 5.2 і на рис. 5.7.
″
-
+10
+5
0
-5
- 10
0 45° 90° 135° 180° 225° 270° 300° 330° φ°
Рис.5.7. Графік змінювання ексцентриситету алідади горизонтального круга теодоліта 3Т5КП № 0035.
5.5. Порядок виконання лабораторної роботи .
1. Накреслите або зробите ксерокопію схеми вертикальних осьових систем Рейхенбаха, Борда і Репсольда, навидите стислий опис їх особливостей і в яких типах теодолітів вони застосовуються.
2. Накреслите або зробите ксерокопію схеми циліндричних осьових систем, які обладнані заплічиками, сферично – торцевим упором, на підшипниках кочення. Дайте опис їх особливостей і в яких типах теодолітів застосовуються.
3. Накреслите або зробите ксерокопію конструкцій вертикальних осьових систем Т30 , 2Т2К і 3Т2КП . Навидите їх стислий опис.
4. Накреслите або зробите ксерокопію схем горизонтальної осьової системи з циліндричним та V – подібним ла - гером. Наведіть стислий опис цих систем.
5. Накреслите або зробите ксерокопію схему видів ексцентриситету горизонтального круга теодоліту та схему впливу ексцентриситету на точність відлічування.
6. Визначите ексцентриситет алідади горизонтального круга теодоліта 3Т2КП або 2Т5К.
7. Дайте висновок про стан осьової системи горизонтального круга теодоліта.
5.6. Контрольні запитання.
1. Які схеми вертикальних осьових систем застосовують в сучасних теодолітах?
2. Які вимоги пред’являють до виготовлення осьової пари (вісь - втулка), до розміру і діаметру осі?
3. Які переваги циліндричних вертикальних осьових систем перед конічними?
4. Які схеми горизонтальних осьових систем застосовують в сучасних теодолітах?
5. Призначення випробувань вертикальних і горизонтальних осьових систем теодолітів?
6. Види і характеристики ексцентриситету горизонтального круга теодоліта?
7. Розповість про порядок визначення ексцентриситету алідади горизонтального круга теодоліта 3Т2КП?
8. Які показники визначають при дослідженні ексцентриситету алідади горизонтального кругу теодоліта?
Лабораторна робота № 6.
Вивчення основних метрологічних вимог до збереження й експлуатації геодезичних приладів .
Мета роботи : Вивчити основні вимоги до порядку розбирання і складання , чистки і змазування осей, до збереження й експлуатації геодезичних приладів.
6.1.Основні відомості .
6.1.1. Розбирання і складання геодезичних приладів.
Кожний геодезичний прилад є складний оптико - механічний інструмент. Наприклад, теодоліт 3Т2КП має більш як 70 оптичних і механічних деталей. Юстировка його оптичної схеми – процес трудомісткий, що потребує спеціальних навичок і пристроїв. Тому розбирання,чистка, змазування і складання геодезичних приладів виконують досвідчені фахівці і тільки у виключних випадках.
По перше ніж приступити до розбирання приладу, старанно вивчають інструкцію. Розбирання проводять у чистому сухому приміщенні, на застеленому столі.
Категорично забороняється розбирати прилад на відкритому повітрі. Розбираючи оптико – механічні деталі, обов’язково роблять позначки, що показують послідовність розміщення і точне положення деталей. Не слід розбирати ті частини приладу, які цього не потребують.
6.1.2. Чистка і змазування.
Чистку оптичних деталей проводять ватним тампоном, змоченому у спирті. При цьому слід пометати, що спирт розчиняє лак.
Тому спирт не повинен попадати на склеєні оптичні деталі. Не можна протирати оптику і деталі сухою серветкою, тому що на склі виникає електричний розряд, який притягує пилинки.
Перед чисткою старанно оглядають вату і поверхню деталі, щоб на неї не було піщинок, особливо при чистці лімбів, сітки ниток, шкал мікроскопів і оптичних деталей зорової труби, щоб не подряпати.
Прилад чистять і змазують найчастіше при складанні приладу. Змазування проводять тільки у разі крайньої необхідності. Геодезичні прилади, як правило, не потребують сезонної заміни змазки.
6.1.3. Зберігання й експлуатація.
Геодезичні прилади зберігають у пакувальних ящиках на стелажах, штативи й рейки – у вертикальному положенні. Прилади розміщують на віддалі від опалювальних приладів не менше як 1м.
Прилади оснащені магнітними стрілками, зберігають на віддалі не менш як 2м від предметів феромагнітних матеріалів і електричних проводів.
Зберігати прилади у приміщенні, де є хімічні джерела струму, забороняється. Повітря у приміщенні не повинно утримувати агресивних сумішей, бо це призводить до руйнування приладів.
Умови експлуатації різних приладів вказують у відповідних стандартах на конкретний прилад. Тому ці умови різні.
6.2. Порядок набуття навичок за доглядом приладів.
6.2.1. Чистка оптичних поверхонь.
Із зовнішніх оптичних поверхонь зорової труби, мікроскопа, оптичного виска й візирного пристрою пил здувають з допомогою гумової Груши, а потім кісточкою ретельно вилучають бруд і плями.
Жирові плями (наприклад, сліди пальців) промивають ватним тампоном, змоченим спиртною і ефірною сумішшю. Внутрішні оптичні деталі чистять ватним тампоном, накрученим на дерев’яну паличку і змоченим у спирті або ефірі.
Під час чистки слід пам’ятати, що просвітлена оптика теодолітів типу 3Т2КП особливо чутлива до механічних пошкоджень.
6.2.2. Чистка й змазування механічних поверхонь.
При важкому ході вертикальної або горизонтальної осі, підіймальних або навідних гвинтів, їх неплавному обертанні чистять й змазують цапфи, лагер , гвинти та інші механічні деталі.
Після розбирання деталі попередньо витирають чистою серветкою, промивають бензином, сушать і знову витирають. Потім наносять одну – дві краплі масла на тертьові поверхні .
Рекомендується застосовувати масла таких марок: ОКБ – 122 – 4, 5, 16. Різьбу гвинтів і пружин змазують густою змазкою: ЦИАТИМ – 201, 221.
Для змазування не можна застосовувати тваринне чи рослинне масло, тому що воно окислює поверхню метала.
У показовому порядку розбирання, складання і чистку роблять у спеціальній майстерні. При цьому студенти записують послідовність розбирання по вузлах і деталях приладу.
6.3. Технічне обслуговування приладу.
Теодоліт необхідно утримувати в справності і постійній готовності до застосування . Обережне звернення з приладом забезпечить надійну його роботу і тривалий строк служби без ремонту.
При експлуатації необхідно дотримуватись наступних правил:
- оберігати теодоліт від опадів і однобічного нагріву сонячними променями, при короткочасному дощу накривати теодоліт чохлом, при тривалому – складувати у футляр. При перервах у роботі надівають на об’єктив кришку і накривають теодоліт чохлом.
Для запобігання конденсації вологи , яка приводить до забруднення оптики, слід вносити теодоліт з холоду в тепле приміщення у футлярі і виймати не раніше ніж через 2 години.
При виносі теодоліта на холод, виймати його з футляру можна не раніше, ніж через 30 хвилин для уникання великих місцевих напружень в оптичних деталях, які приводять до їх роз`юстування.
Необхідно також дотримуватись правил транспорту і схову.
6.4. Перевірка технічного стану приладу.
Перевірка дозволяє своєчасно виявити і усувати несправності теодоліта. Рекомендується наступний перечень операцій і засобів перевірки технічного стану.