

5. Динамика переходных процессов нагруженных машин
Пуск и остановка многих машин (мостовые краны, различные грузоподъемные устройства, скиповые подъемники и т.п.) осуществляются при наличии внешних нагрузок. Рассмотрим несколько случаев, характеризующихся разным характером приложения внешних нагрузок.
5.1. Мгновенное приложение нагрузки
Примером такого приложения нагрузки является подъем груза «с подрывом» (рис. 17).
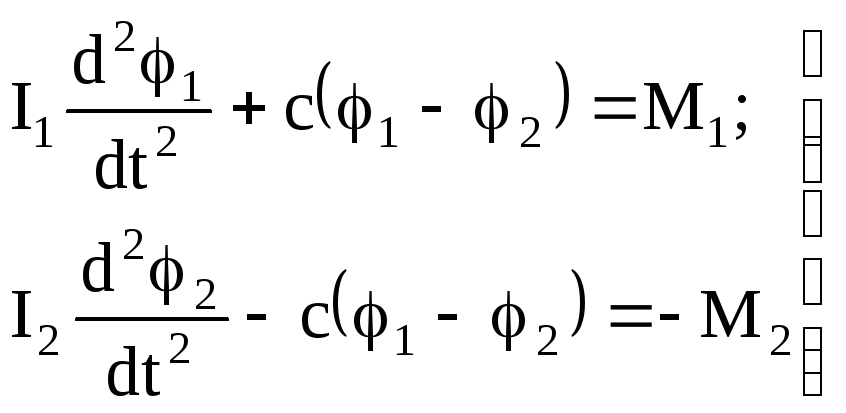
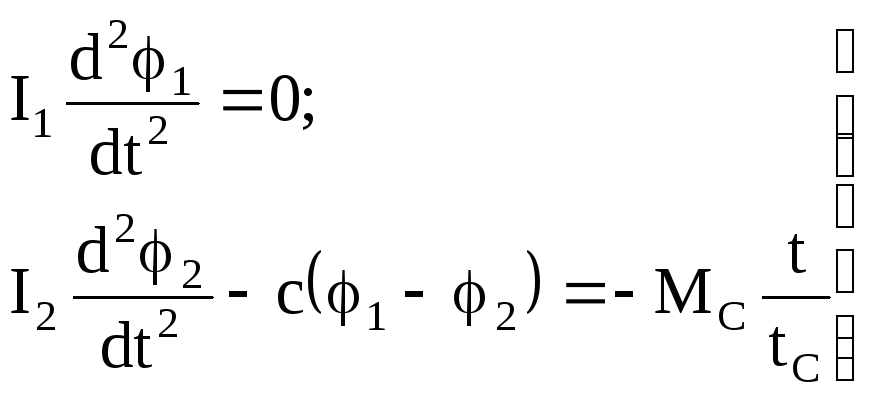
Д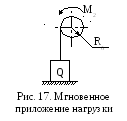 ифференциальные
уравнения движения системы при пуске
ифференциальные
уравнения движения системы при пуске
 .
(133)
.
(133)
В
результате решения системы уравнений
(133) для начальных условий
![]() ,
,
![]() получим
получим
![]() ,
(134)
,
(134)
где
![]() ,
,
![]() .
.
Тогда
![]() ,
(135)
,
(135)
а коэффициент динамичности
![]() .
(136)
.
(136)
5.2. Пуск при постоянной нагрузке
Примером такого характера приложения нагрузки является подъем груза из промежуточного положения (рис. 18).
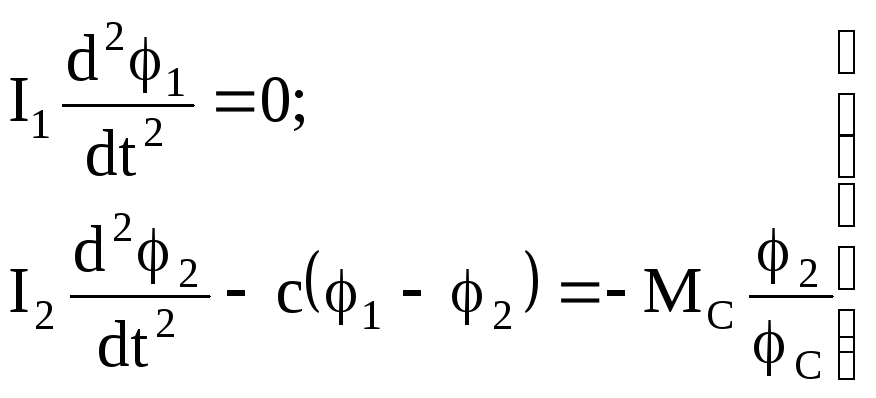
Р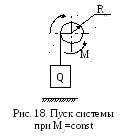 ешая
систему уравнений (133) получим
ешая
систему уравнений (133) получим
![]() .
(137)
.
(137)
Отсчитывая
время от начала движения обеих масс
системы, т.е. полагая, что при
![]()
![]()
![]() и
и
![]() ,
и подставляя эти условия в уравнение
(137), получим
,
и подставляя эти условия в уравнение
(137), получим
![]() ;
;
![]() .
.
Тогда
![]() .
(138)
.
(138)
Момент, воспринимаемый упругим звеном
![]() ,
(139)
,
(139)
а его максимальное значение
![]() .
(140)
.
(140)
При торможении системы тормозящий момент может быть приложен к ведущей или ведомой массам.
В
первом случае момент торможения и момент
нагрузки M2
имеют одинаковый знак. Поэтому в начальных
условиях следует принять, что для
![]()
![]() .
Тогда
.
Тогда
![]() .
(141)
.
(141)
Во
втором случае в первом из уравнений
(133) следует правую часть приравнять
нулю, а во втором уравнении правая часть
будет
![]() .
.
При этом
![]() .
(142)
.
(142)
6. Динамика нагружения машин после разгона
Внешняя нагрузка рабочего органа машин может изменяться в функции угла поворота, времени или скорости движения.
6.1. Изменение внешней нагрузки в функции угла поворота
Наиболее простым и часто встречающимся случаем является линейное изменение нагрузки
![]() ,
(143)
,
(143)
где
![]() – угол, соответствующий установившейся
статической нагрузке
– угол, соответствующий установившейся
статической нагрузке
![]() ведомой массы.
ведомой массы.
Одним
из примеров такой ситуации, когда
![]() ,
является процесс заполнения очага
деформации при захвате полосы валками.
,
является процесс заполнения очага
деформации при захвате полосы валками.
В большинстве двигателей скорость вращения вала двигателя после разгона сохраняется относительно постоянной. При этом система уравнений принимает вид
 .
(144)
.
(144)
Из первого уравнения получим
![]() ,
(145)
,
(145)
где
![]() – установившаяся скорость ведущей
массы.
– установившаяся скорость ведущей
массы.
Подставив значение 1 во второе уравнение системы (144), найдем
 ,
(146)
,
(146)
общее решение которого
![]() .
(147)
.
(147)
Начальные
условия: при
![]() ,
,
![]() ,
,
![]() .
.
Тогда
![]() ,
,
 (148)
(148)
и
![]() .
(149)
.
(149)
Деформация упругого звена равна
![]()
 .
(150)
.
(150)
Характер
изменения нагрузки
![]() показан на рис. 19, где
показан на рис. 19, где
![]() – время,
соответствующее
– время,
соответствующее
![]() .
.
Если при выбранных условиях
![]() ,
,
тогда из выражения (150) найдем
![]() . (151)
. (151)
П одставим
значение
одставим
значение
![]() в уравнение (150) и умножим на c.
Тогда получим
в уравнение (150) и умножим на c.
Тогда получим
![]() .
(152)
.
(152)
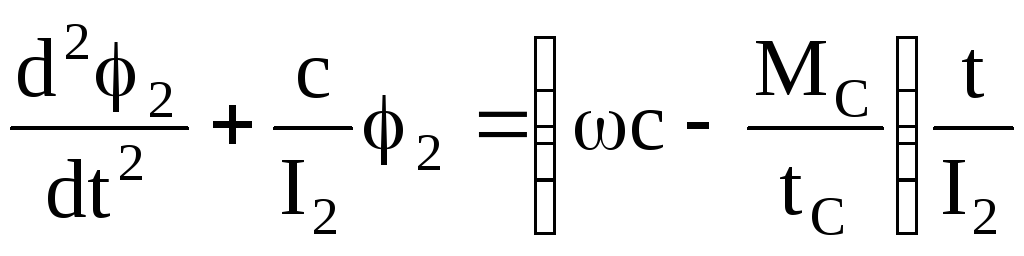
6.2. Изменение внешней нагрузки в функции времени
6.2.1. Система уравнений движения двухмассовой системы
при воздействии на ведомую массу нагрузки,
изменяющейся в функции времени по линейному закону,
имеет вид
 ,
(153)
,
(153)
где
![]() – время, соответствующее окончанию
нарастания нагрузки.
– время, соответствующее окончанию
нарастания нагрузки.
Заменим
во втором уравнении
![]() и получим
и получим
 ,
(154)
,
(154)
общее решение которого
![]() .
(155)
.
(155)
При
![]()
![]() и
и
![]() ,
откуда
,
откуда
![]() ,
,
![]() .
.
Тогда
 .
(156)
.
(156)
Деформация упругого звена
 .
(157)
.
(157)
Характер
изменения нагрузки
![]() аналогичен показанному на рис. 19.
аналогичен показанному на рис. 19.
В
момент
![]() окончания нарастания внешней нагрузки
окончания нарастания внешней нагрузки
![]() .
(158)
.
(158)
Скорость деформации упругого звена
![]() .
(159)
.
(159)
Условие
(158) предполагает согласно (157), что при
![]()
![]() или
или
![]() в (159). Для значения
в (159). Для значения
![]() ,
соответствующего наибольшей скорости
деформации, при
,
соответствующего наибольшей скорости
деформации, при
![]() получим
получим
![]() .
(160)
.
(160)
Уравнение движения ведомой массы после окончания нарастания внешнего сопротивления
![]() ,
(161)
,
(161)
а его общее решение
![]() .
(162)
.
(162)
Деформация упругого звена
![]() .
(163)
.
(163)
Начиная
новый отсчет времени и подставляя при
![]()
![]() и
и
![]() [см. уравнения (158) и (160)], получим
[см. уравнения (158) и (160)], получим
![]() ;
(164)
;
(164)
![]() ;
(165)
;
(165)
![]() .
(166)
.
(166)