

2. Общие решения уравнений динамики жестких систем
Задачи
динамики жестких систем заключаются в
том, чтобы по заданным силам или моментам
определить закон движения системы
(положение - x
или ,
скорости
![]() или
или
![]() и ускорения
и ускорения
![]() или
или
![]() в любой момент времени) или по заданному
закону движения определить силы, под
действием которых оно происходит.
в любой момент времени) или по заданному
закону движения определить силы, под
действием которых оно происходит.
Жесткие системы могут быть представлены в виде одной приведенной массы (момента инерции массы), движущейся под действием приведенной силы (момента).
Приведенные
силы могут зависеть от координаты x,
скорости
![]() и времени t.
Величина приведенной массы также может
быть переменной и зависеть от положения
(координаты x).
и времени t.
Величина приведенной массы также может
быть переменной и зависеть от положения
(координаты x).
Обозначим
переменные приведенную силу
![]() и приведенную массу
и приведенную массу
![]() .
.
При рассмотрении системы как жесткой, её элементы не деформируются при действии сил и моментов.
Пусть в момент времени отсчета t0 скорость движения приведенной массы m равна 0. Тогда работа внешней силы для поступательно движущейся массы равна
![]() , (63)
, (63)
скорость движения
 , (64)
, (64)
ускорение
 , (65)
, (65)
координата
 . (66)
. (66)
При заданных координатах из формулы (64)
 , (67)
, (67)
откуда
 . (68)
. (68)
Для
вращающихся масс результаты выводов
аналогичны при использовании координаты
,
скорости ,
момента инерции массы I
и момента силы
![]() в приведенных выше формулах.
в приведенных выше формулах.
Приемы
интегрирования дифференциального
уравнения движения жесткой системы
связаны с характером функций
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
Рассмотрим некоторые конкретные примеры.
.
Рассмотрим некоторые конкретные примеры.
1)
Масса системы
![]() ,
,
Движущая
сила
![]() .
.
Скорость из формулы (64) будет равна
![]() .
(69)
.
(69)
Возведя обе части в квадрат и дифференцируя по t, найдем ускорение
![]() ,
(70)
,
(70)
или
![]() .
(71)
.
(71)
Выражение (71) является вторым законом Ньютона в упрощенном виде.
Представив выражение (69) в виде
 ,
(72)
,
(72)
получим
 ,
(73)
,
(73)
откуда
 ,
(74)
,
(74)
а скорость приведенной массы
 .
(75)
.
(75)
Если
начальная скорость
![]() ,
то формулы (73), (74) и (75) примут вид
,
то формулы (73), (74) и (75) примут вид
![]() ,
(76)
,
(76)
![]() ,
(77)
,
(77)
![]() .
(78)
.
(78)
Аналогичные формулы получаются и для вращающейся массы.
2)
Момент инерции массы
![]() ,
,
движущий
момент изменяется в функции угла поворота
![]() по закону
по закону
![]() ,
,
где
![]() – текущая угловая координата, а
– текущая угловая координата, а
![]() – угол,
соответствующий максимальному значению
– угол,
соответствующий максимальному значению
![]() ,
равному M,
причем
,
равному M,
причем
![]() .
.
Угловая скорость равна
 ,
(79)
,
(79)
откуда
 ,
(80)
,
(80)
 .
(81)
.
(81)
Преобразуя выражение (81), получим
 ,
(82)
,
(82)
или
 ,
(83)
,
(83)
откуда
 .
(84)
.
(84)
Возводя обе части равенства (84) в квадрат, решая относительно и дифференцируя по t, получаем
 ,
(85)
,
(85)
 ,
(86)
,
(86)
 .
(87)
.
(87)
3)
Момент инерции массы
![]() ,
движущий момент изменяется в функции
скорости
,
движущий момент изменяется в функции
скорости
![]() .
.
Пусковые характеристики электродвигателей часто принимают линейными. При этом момент может быть выражен в виде
![]() ,
(88)
,
(88)
где M – наибольший приведенный пусковой момент,
![]() – наибольшая
скорость приведенной массы.
– наибольшая
скорость приведенной массы.
Для
краткости выводов примем
![]() .
.
Тогда из (64)
 ,
(89)
,
(89)
откуда
![]() ,
(90)
,
(90)
или,
заменив
![]() ,
получим
,
получим
![]() ,
,
откуда
![]() (91)
(91)
и
![]() .
(92)
.
(92)
Решая
относительно
![]() ,
найдем
,
найдем
![]() .
(93)
.
(93)
Дифференцируя и интегрируя, получаем
 ,
(94)
,
(94)
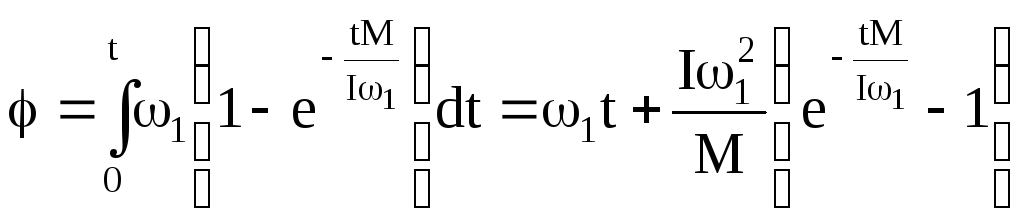 .
(95)
.
(95)
4)
Момент инерции массы
![]() ,
движущий момент изменяется в функции
времени
,
движущий момент изменяется в функции
времени
![]() .
.
При разгоне электродвигателя с контакторным управлением
![]() ,
(96)
,
(96)
где M – максимальный пусковой момент;
![]() – время
разгона.
– время
разгона.
Для рассматриваемого случая
 ,
(97)
,
(97)
откуда аналогично предыдущим решениям получим
 ,
(98)
,
(98)
 ,
(99)
,
(99)
 .
(100)
.
(100)