

ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«Самарский государственный аэрокосмический университетимени академика С.П. Королева (НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ)»
Система воздушных сигналов свс-пн-15 самолета Ту-154 б2
Самара 2014
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ
ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«Самарский государственный аэрокосмический университет имени академика С.П. Королева
(НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ)»
Система воздушных сигналов свс-пн-15 самолета Ту-154 б2
Методические указания к практическим занятиям
Самара 2014
УДК 629.7.054'845
Составитель: А.А. Зайцев
Рецензент: А.П. Герман
Система воздушных сигналов СВС-ПН-15 самолета Ту-154Б2: метод. указания / А.А. Зайцев. - Самара: Изд-во Самар. гос. аэрокосм. ун-та, 2014. – 30 с.: ил.
Изложено описание системы воздушных сигналов СВС-ПН-15. Рассмотрена конструкция и принцип действия блоков системы СВС, работа каналов М,V,H, система питания полным и статическим давлением барометрических приборов. Особое внимание уделено предполетной проверке.
Методические указания предназначены для студентов специальности 160903 выполняющих практические работы на учебном аэродроме и могут быть использованы при изучении конструкции самолета по курсу «Авиационная техника»
Разработаны на кафедре ЭАТ.
© Самарский государственный
аэрокосмический университет, 2014
ОБЩИЕ ПРАВИЛА БЕЗОПАСНОЙ РАБОТЫ ПРИ ТЕХНИЧЕСКОЙ ОБСЛУЖИВАНИИ САМОЛЕТА
При работе по обслуживанию системы самолета необходимо строго выполнять общие правила.
1. Все работы на самолете должны производиться в строгой соответствии с технологическими указаниями выполнения работы.
2. Все работы по осмотру производить только при обесточенной бортовой сети.
3. Пользоваться бортовыми аккумуляторами разрешается только при проверке работоспособности потребителей, подключенных только к аварийной шине, в остальных случаях пользоваться только аэродромным источником питания.
4. Перед началом работы на самолете необходимо принять меры по запрету разрядки статического электричества, через людей, для чего самолет необходимо заземлить.
5. Все работы на самолете должны выполняться исправным маркированным инструментом и приспособлениями с использованием измерительной и контрольно-проверочной аппаратуры, установок и стендов, предусмотренных технологическими картами. После окончания работ необходимо проверить весь инструмент, чтобы не оставить его в самолете.
6. При выполнении работ на самолете запрещается ходить по обшивке самолета без специальной мягкой обуви и прислонять к обшивке самолета стремянки и другое наземное оборудование, не обшитое мягким материалом.
7. Защита воздухозаборников, входных и выходных патрубков самолетных систем, приемников полного и статического давления, датчиков и антенн от атмосферных влияний, пыли, посторонних предметов и повреждений, осуществляется установкой заглушек и кожухов. Снятые перед запуском двигателей заглушки, кожухи и трос заземления укладываются в специальный мешок и хранятся в отсеке для транспортируемого наземного оборудования самолета, расположенного у двери второго грузового отделения.
8. Во время запуска двигателей и их работы обслуживающий персонал должен находиться на безопасном расстоянии в поле зрения производящего запуск.
9. При проверке радиотехнического оборудования необходимо пользоваться правилами по технике безопасности, как при работе с генераторами сверх высоких частот (СВЧ). Продолжительность проверок с СВЧ излучением не должна превышать 10 мин.
10. Перед началом и после окончания работ проверить по описи инструмент, чтобы не оставить его на самолете.
11. При прохождении практики на аэродроме студентам предписывается выполнять вышеперечисленные правила, инструкции и правила внутреннего распорядка, установленные администрацией предприятий, на которых организована практика.
12. На территории аэродрома, на самолете не курить и не пользоваться открытым огнем. Все лица, выполняющие работы на самолете, должны ознакомлены с инструкцией по технике безопасности и расписаться в журнале по технике безопасности.
ЦЕЛЬ РАБОТЫ
Целью данной работы является ознакомление с устройством, принципом работы и приобретение навыков по техническому обслуживанию системы воздушных сигналов СВС-ПН-15-4Б сер.2 самолета Ту-154.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Изучить систему воздушных сигналов СВС-ПН-15-4Б сер.2 самолета Ту-154.
2. Ознакомиться с основными составными элементами системы.
3. Ознакомиться с технологией технического обслуживания.
4. Выполнить подготовительные работы.
5. Провести техническое обслуживание системы.
6. Оформить отчет.
Описание системы.
Система СВС (рис.1) выполняет следующие функции:
измеряет и индицирует:
- барометрическую высоту относительно установленного давления Нотн и Н760;
- истинную воздушную скорость Vист.;
- число М;
выдает сигналы:
- отклонение от заданной высоты «ΔΗ» или от заданного числа М «ΔМ» в канал тангажа системы САУ-154-2 для обеспечения режимов стабилизации заданной высоты или числа М, включаемых на пульте ПУ-46;
- истинной воздушной скорости VИСТ В НВУ-Б3 сер.04 для расчета параметров ветра и счисления координат места ВС при отказе ДИСС-013;
- барометрической высоты HИСТ или H760 в самолетный ответчик в зависимости от его режимов работы;
- «+27 В» при установке стандартного давления Р0=760±1 мм рт.ст. в самолетный ответчик и в МСРП-64М-2;
- обеспечивает индикацию путевой скорости, измеряемой системой ДИСС-013.
Электропитание системы СВС-ПН-15-4Б осуществляется:
постоянным током напряжением 27В;
переменным током напряжением 115В, частотой 400Гц;
переменным током напряжением 36В, частотой 400Гц.
Автоматы защиты «СВС питание, обогрев, вентиляция» на левой панели АЗС, выключатели «СВС-ПН питание, обогрев» на верхнем электрощитке пилотов.
Время готовности при температурах наружного воздуха:
выше -300 С 15 мин.;
ниже -300 С 30 мин.
Принцип действия системы СВС-ПН-15-4Б сер.2
Система имеет отдельные каналы вычисления высотно-скоростных параметров полета: H760, HОТН, VИСТ, M, ΔΗ, ΔM.
Значения высоты, скорости и числа М непрерывно рассчитывает вычислитель ВСМВ-Ι-15М по информации:
РПОЛ от левого нижнего ППД-1М;
РСТ от третьей статической магистрали;
Наэр сигнала установленного давления на УВО-15МΙБ командира ВС;
Т0С сигнал температуры наружного воздуха от приемника П-5.
Элементы, входящие в состав систем типа СВС—ПН представлены на рис. 14.3. Вычислитель скорости, числа М и высоты ВСМВ работает при подаче на его вход сигналов: давлении Р и Рп от приемников воздушных давлений;
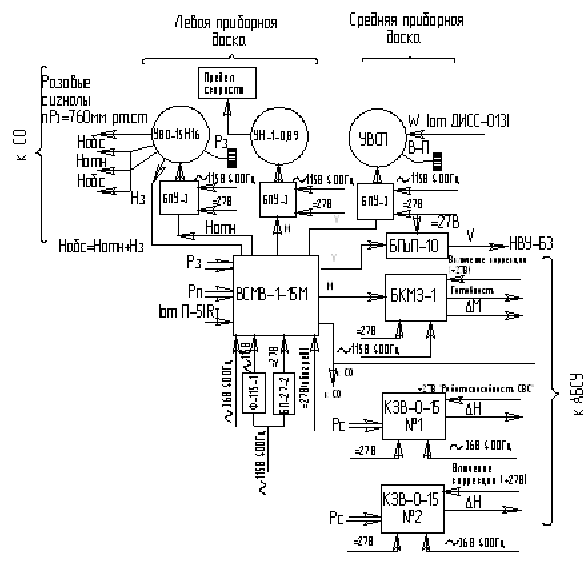
Рис. 1. Структурная схема системы воздушных сигналов СВС-ПН-15-4Б
температуры торможения Тт в виде омического сопротивления Rт от приемника температуры заторможенного потока; высоты Нз заданного уровня Земли от указателя относительной барометрической высоты УВО. Ввод сопротивления, пропорционального высоте Нз, как функции давления Рз на заданном уровне Земли, осуществляется функциональным потенциометром, воспроизводящим
функцию Нз =f(Рз), при вращении ручки ввода Рз на лицевой части указателя УВО.
Вычислитель ВСМВ предназначен для решения и выдачи в виде напряжений сигналов, пропорциональных Н, Нотн, М и V.
 (при
Н≤11 км)
(при
Н≤11 км)
![]() для
высот 11 ≤ Н ≤ 20 км
для
высот 11 ≤ Н ≤ 20 км
 M=
Vu/a,
M=
Vu/a,
где
k=Cp/Cv=1.4, ![]() ,
,
 где
ξ – коэффициент торможения воздуха,
где
ξ – коэффициент торможения воздуха,
Тт- температура заторможенного потока.
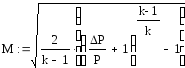
Функциональная схема вычислителя ВСМВ приведена на рис. 2. Вычислитель состоит из индукционных датчиков статического и динамического давлений ДДСИ и ДДДИ, функциональных преобразователей напряжения ПНФ, полупроводниковых усилителей У, трансформаторов Т. В вычислителе ВСМВ при решении приведенных выше зависимостей используется метод суммирования электрических сигналов. Этим объясняется логарифмирование параметров, входящих в расчетные зависимости.
Как отмечалось выше, зависимости прогибов УЧЭ датчиков ДДСИ и ДДДИ в функции от давлений меняются по логарифмическому закону. Характеристики индукционных преобразователей этих датчиков являются линейными. В связи с этим характеристики датчиков ДДСИ и ДДДИ по давлениям в целом меняются по логарифмическому закону.
В целях упрощения изложения в тексте и в схеме на рис. 2 коэффициенты пропорциональности опущены.
Основные функциональные преобразования в соответствии с расчетными формулами осуществляются преобразователями ПНФ (ПНФ1 и ПНФ2—для ДДСИ, ПНФЗ—для ДДДИ). С помощью ПНФ4 получается сигнал в виде напряжения U9, пропорционального числу М. ПНФ5 в канале скорости V позволяет получить сигнал в виде напряжения U12 = f (М)V.
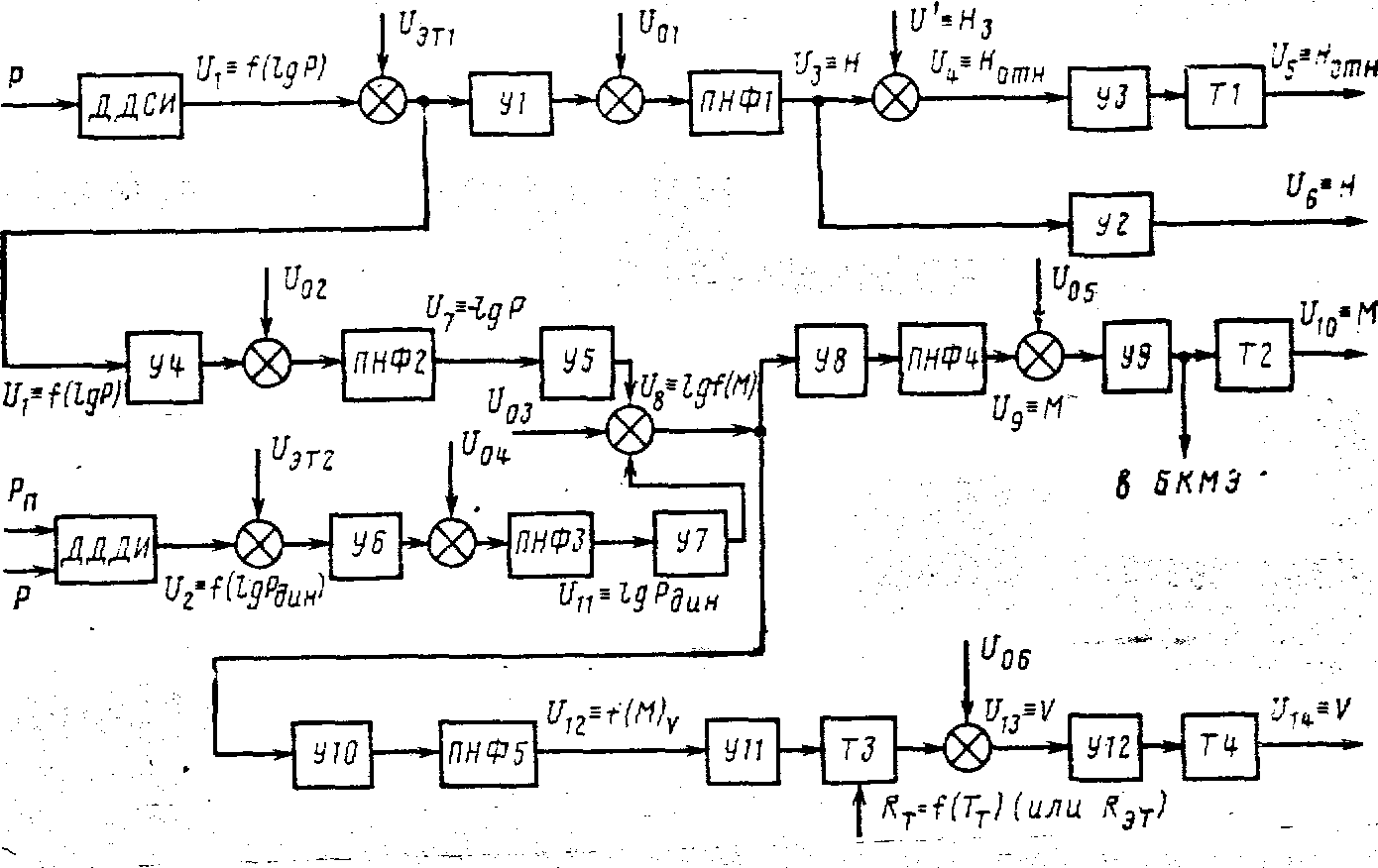
Рис. 2. Функциональная схема вычислителя ВСМВ
Этот сигнал подается через усилитель У11 на первичную обмотку трансформатора. В приведенной схеме (рис. 3) напряжение Uвх пропорционально функции f (М)V, а отношение RТ/(R+RТ) пропорционально квадратному корню из Тт. Поэтому выражение Uвых=(Uвх*RТ)/(R+RТ) определяет скорость V. После суммирования с начальным напряжением U06 это напряжение (U13) через усилитель У12 и размножающий трансформатор Т4 поступает к потребителям.
Полупроводниковые усилители У1—У12 предназначены для усиления сигналов по мощности и напряжению.
Рис. 3. Схема умножения мощью трансформатора
С трансформаторов начальных значений, не показанных на рис. 2, в каналы параметров Н, Нотн, М и V вводятся сигналы U01— U06 начальных напряжений для компенсации ненулевых остаточных сигналов и фазовых искажений в каналах системы.
На входы усилителей У1, У4, У6 могут подаваться контрольные сигналы Uэт1 и Uэт2 встроенного контроля, соответствующие тестовым значениям Р и Рдин. Ко вторичной обмотке трансформатора ТЗ вместо сопротивления RТ подключается в этом случае сопротивление RЭТ.
Вычислитель питается через фильтр Ф по переменному току (115 В, 400 Гц) (рис. 4) и через блок питания БП по постоянному току. Напряжения, пропорциональные параметрам Н, Нотн, V, преобразуются в соответствующие сопротивления блоками БПнП.
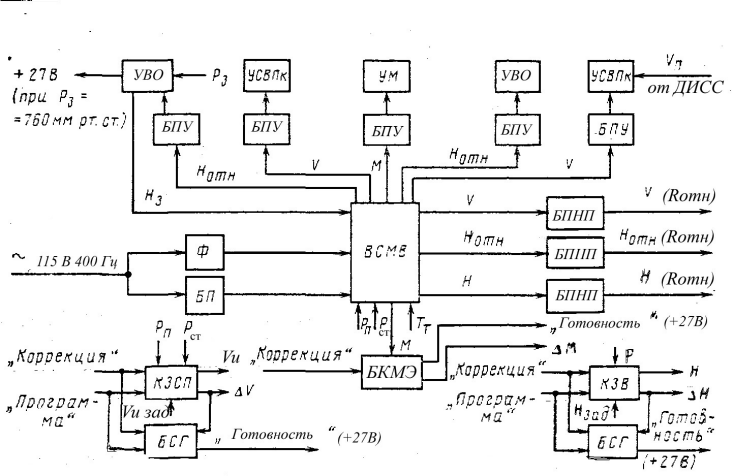
Рис. 4. Структурная схема системы типа СВС-ПН
Сигнал, пропорциональный ΔМ, выдается блоком коррекции числа М БКМЭ при подаче на его вход команды «коррекция» и сигнала переменного тока частотой 400 Гц, пропорционального числу М.
Сигналы в каналах Нотн, V, М усиливаются блоками питания с усилителями БПУ, работающими в комплектах с указателями УВО, воздушной и путевой скорости УСВПк, числа М УМ. При соответствующей установке переключателя на указателе УСВПк системы СВС—ПН дают возможность индикации путевой скорости Vп по данным доплеровского измерителя ДИСС.
Рассмотрим основные функциональные элементы систем типа СВС-ПН.
Датчики ДДСИ и ДДДИ имеют одинаковые принципиальные схемы. Они отличаются лишь УЧЭ: в ДДСИ применяется анероидная коробка, а в
ДДДИ—манометрическая коробка. Рассмотрим принципиальную электрическую схему датчика ДДСИ (рис. 5). В датчике имеются два индукционных преобразователя.
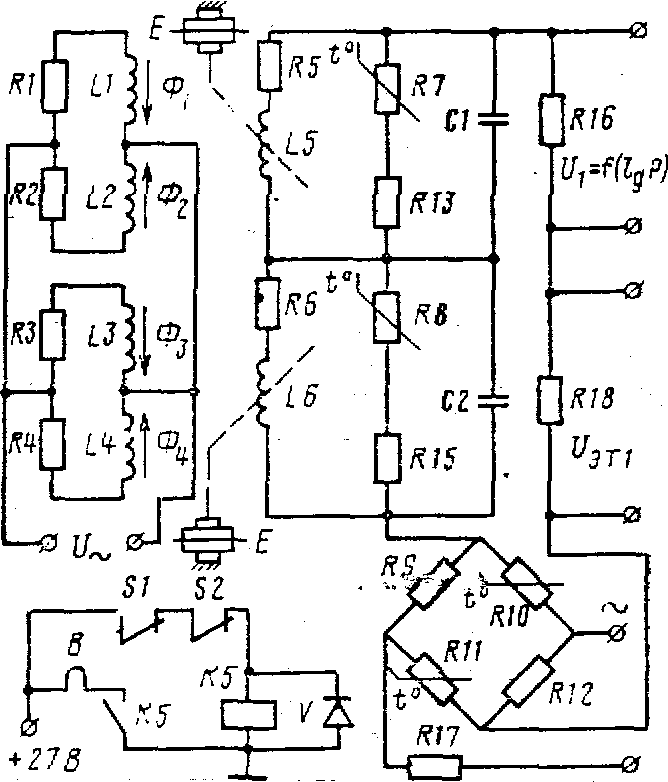
Рис. 5. Принципиальная схема датчика статического давления типа ДДСИ
Каждый индукционный преобразователь состоит из двух неподвижных первичных обмоток L1, L2 (L3, L4), включенных встречно, и подвижной вторичной обмотки L5 (L6). Вторичная обмотка перемещается жестким центром анероидной коробки Е. Обмотки L5, L6 включены последовательно. Перемещение жестких центров анероидных коробок встречное, что позволяет исключить погрешности от ускорений вдоль осей обмоток.
Изменение статического давления Р приводит к перемещению подвижных обмоток относительно неподвижных. В них наводятся ЭДС, которые суммируются. С выхода датчика снимается напряжение U1=f(lg Р).
В целях уменьшения температурных погрешностей датчика используется термостатирование с помощью нагревательного элемента В, реле К5 и биметаллических термоэлементов S1 и S2. Поддерживаемая температура +45 ±5° С. При увеличении температуры элемент S1 разрывает цепь питания реле К5. При отказе элемента S1 и температуре +60° С срабатывает элемент S2.
Смещение нуля выходного сигнала устраняется мостиковым термокомпенсатором I рода, состоящим из резисторов R9—R12. Изменение наклона характеристики датчика компенсируется термокомпенсатором II рода с помощью резисторов R7, R8.
Преобразователи ПНФ. Заданная функция Uвых = f (Uвх) в преобразователях ПНФ воспроизводится методом кусочно-линейной аппроксимации. Преобразователи ПНФ состоят из отдельных ячеек, каждая из которых рассчитана на аппроксимацию функции одним отрезком. Так как все решаемые зависимости на рабочих участках представляются вогнутыми либо выпуклыми, рассмотрим преобразователи ПНФ для воспроизведения этих двух видов функций.
На рис. 14.7а представлена схема ПНФ постоянного тока. При Uвх= 0 все ячейки заперты опорными напряжениями источников G1—GN. При увеличении Uвх напряжение Uвых на выходе растет линейно, причем наклон первого участка (рис. 6,б) определяется резисторами R1, Rн. При Uвх =U1 ≥ Ug1 открывается и резистор R2 шунтирует резистор Rн. Крутизна характеристики меняется. Остальные ячейки работают так же.
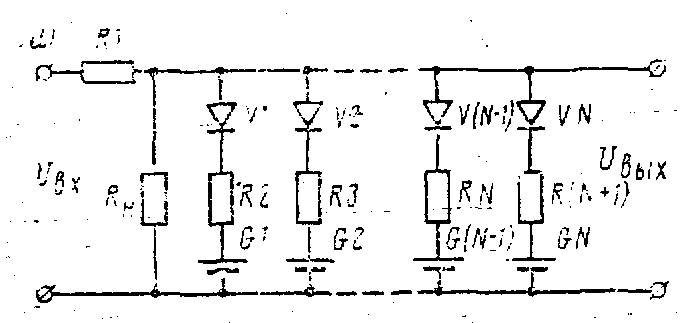

Рис. 6. Возможная схема функционального преобразователя ПНФ:
а—схема преобразователя постоянного тока для воспроизведения выпуклых функций; б—выпуклая функция
На рис. 7, а приведена схема ПНФ переменного тока для воспроизведения выпуклых функций. Схема состоит из ячеек с резисторами и диодами. Количество ячеек соответствует числу аппроксимирующих отрезков. Опорные напряжения каждой пары диодов ячеек по абсолютной величине равны между собой. Выходное напряжение снимается с резистора Rн. Конденсатор С предназначен для регулировки фазы Uвх.
Точность воспроизведения характеристик зависит от числа аппроксимированных участков заданной функции, а следовательно, числа ячеек ПНФ.
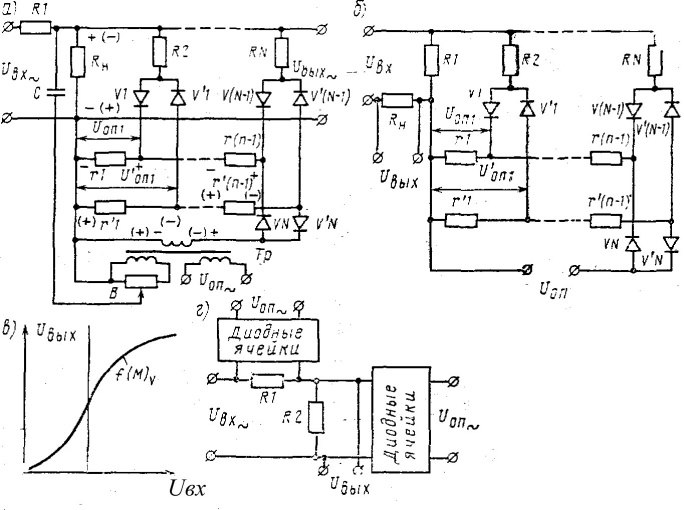 Рис.
7. Возможные схемы функциональных
преобразователей переменного тока:
Рис.
7. Возможные схемы функциональных
преобразователей переменного тока:
а — схема для воспроизведения выпуклых функций: б — схема для воспроизведения вогнутых функций; в—вогнутовыпуклая функция f{M)y'. s—схема для воспроизведения функции /'(-К)
Блок БПнП (рис. 8,а) построен по принципу самобалансирующейся мостовой схемы. Блок состоит из электрического моста, усилителя У, двигателя-генератора ДГ, потенциометра отработки Пос, выходных потенциометров Пвых.
Поступающее на вход напряжение Uвх из вычислителя сравнивается с помощью мостовой схемы с напряжением, снимаемым с потенциометра Пос. Сигнал рассогласования через усилитель У поступает на управляющую обмотку двигателя-генератора ДГ, вращение которого передается на щетки потенциометров Пос и Пвых и продолжается, пока существует это рассогласование. Сопротивление потенциометров Пвых при этом соответствует входному напряжению.
В схеме используется лекальный корректор (на рисунке не показан), предназначенный для компенсации систематических инструментальных погрешностей. Дополнительный поворот щеток потенциометров Пос и Пвых на величину поправки обеспечивается регулировкой профиля лекала корректора.
Для улучшения работы следящей системы в динамическом режиме в схеме использовано напряжение отрицательной обратной связи, выдаваемое генераторной обмоткой двигателя-генератора ДГ.
.
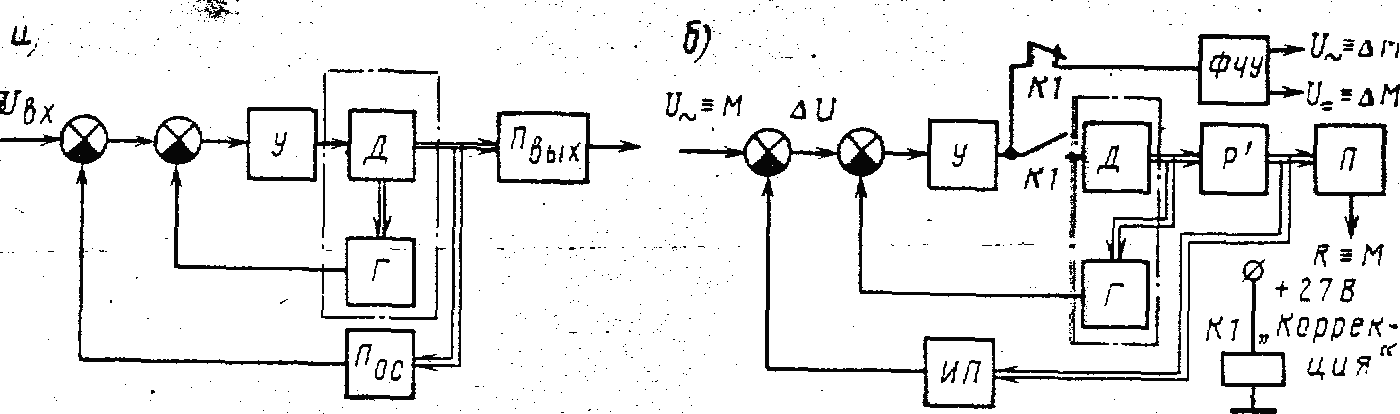
Рис. 8. Функциональные схемы блоков БПнП (а) и БКМЭ (б)
Блок БКМЭ (рис. 14.9,6) выдает сигнал, пропорциональный ΔМ, в виде напряжений постоянного и переменного тока при подаче команды на включение коррекции.
На вход блока поступает сигнал, пропорциональный числу М, в виде напряжения переменного тока частотой 400 Гц. В режиме слежения сигнал сравнивается с сигналом, снимаемым с индукционного преобразователя угла ИП. Сигнал рассогласования ΔU через усилитель У подается на обмотку управления двигателя-генератора ДГ, выходной вал которого через редуктор Р' вращает подвижный элемент ИП и щетки выходных потенциометров П. Вращение продолжается, пока сигнал рассогласования не станет равным нулю. Каждому значению числа М в режиме слежения соответствует определенное значение выходного сопротивления R потенциометров П. Назначение генераторной обмотки Г такое же, как и в блоке БПнП.
Режим коррекции включается при подаче сигнала «коррекции» (+27 В) на обмотку реле К1. При этом к выходу усилителя У подключается фазочувствительный усилитель ФЧУ, двигатель-генератор отключается. В результате при изменении сигнала на входе блока БКМЭ на выходе ФЧУ появятся сигналы, пропорциональные ΔМ. При снятии сигнала «коррекции» блок БКМЭ продолжает работать в режиме слежения.
Указатель УВО (рис. 9) состоит из канала отработки и индикации величины Нотн и канала выдачи относительного сопротивления, пропорционального величине Нз как функции давления Рз.
Канал Нотн построен по принципу самобалансирующейся мостовой схемы. Поступающий с выхода вычислителя электрический сигнал Uвх, пропорциональный величине Нотн, с помощью двигателя М отработки и редуктора Р1 преобразуется в угловое перемещение стрелок и барабанов счетчика Сч. Одновременно двигатель перемещает щетку потенциометра В1 обратной связи и меняет напряжение Uвг в диагонали ВГ моста.
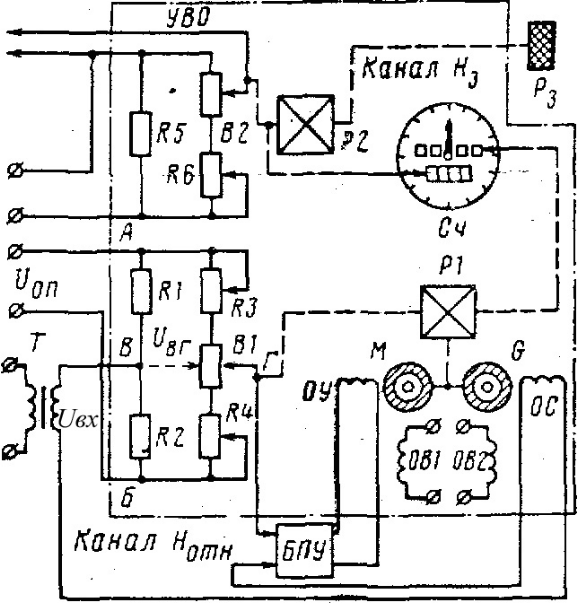
Рис. 9. Принципиальная схема указателя УВО
Управляющий сигнал на обмотку ОУ двигателя М следящей системы подается с усилителя блока БПУ, на вход которого поступают разность напряжений Uвх и Uвг, а также сигнал скоростной обратной связи с обмотки ОС генератора G. Малая стрелка на лицевой части указателя служит для отсчета километров, а большая—десятков и сотен метров. Счетчик показывает высоту в километрах.
В равновесном положении схемы Uвх = -Uвг и напряжение на входе блока БПУ равно нулю. Каждому значению Нотн соответствует определенное положение щетки потенциометра В1 и угол поворота стрелок указателя и барабанов счетчика.
Канал Нз состоит из потенциометра В2, редуктора Р2 и счетчика Сч. Давление Рз вводится кремальерой, с которой связаны счетчик и щетка функционального потенциометра В2, выдающего в вычислитель ВСМВ сигнал Нз =f(Рз).
Обмотки OB1, OB2 являются обмотками возбуждения двигателя и генератора, резисторы R3, R4, R6—юстировочные.
Указатели УСВПк и УМ с блоками БПУ также построены по принципу самобалансирующейся мостовой схемы, их работа аналогична работе указателя УВО с блоком БПУ.
В указателе УСВПк в зависимости от положения переключателя «Возд.—Пут.» на фланце указателя следящая система указателя подключается к вычислителю системы СВС или ДИСС.
Блоки БПУ обеспечивают усиление сигналов рассогласования в каналах Нотн , V, числа М и питание обмоток возбуждения двигателя и генератора в следящей системе. Блок БПУ состоит из полупроводникового усилителя, трансформатора и конденсатора, обеспечивающего сдвиг фаз на 90° напряжений обмоток возбуждения и управления двигателя. Полупроводниковый усилитель имеет два каскада предварительного усиления, фазовый фильтр, предоконечный каскад усиления и выходной усилитель мощности.
Блок питания БП предотвращает амплитудные выбросы бортсети постоянного тока. Принцип стабилизации напряжения в блоке основан на сравнении выходного напряжения с опорным напряжением. Разность этих напряжений через усилитель обратной связи управляет регулирующим элементом. Блок питания состоит из выпрямителей и стабилизатора напряжения на полупроводниковых элементах.
Фильтр Ф уменьшает нелинейные искажения напряжения бортового источника питания 115 В 400 Гц ±2%. Он состоит из последовательного и параллельного, колебательных контуров LC, настроенных на резонанс с частотой 400 Гц. Последовательный контур для частоты 400 Гц имеет минимальное сопротивление, параллельный — максимальное сопротивление. Коэффициент передачи фильтра на частоте 400 Гц близок к единице. На частотах выше 400 Гц коэффициент передачи фильтра резко уменьшается.
К анал
высоты.
В вычислителе ВСМВ изменение статического
давления воспринимается анероидом и
преобразуется индуктивным датчиком в
электрический сигнал Н760.
(рис. 10)
анал
высоты.
В вычислителе ВСМВ изменение статического
давления воспринимается анероидом и
преобразуется индуктивным датчиком в
электрический сигнал Н760.
(рис. 10)
Рис. 10. Канал высоты СВС-ПН
Сигнал НОТН формируется как алгебраическая сумма сигналов Н760 и Наэр (Р0) по установленному давлению на УВО-15МΙ командира ВС. Сигнал HОТН выдается на указатель УВО-15МΙ. Значение высоты индицируется стрелкой по шкале от 0 до 1000 м, а сотни метров и километры – по счетчику в диапазоне от 0 до 15000 м. Кремальера связана с барометрическим счетчиком с диапазоном от 525 до 810 мм рт.ст.
При установке Р0=760±1 мм рт.ст в указателе замыкаются контакты и выдается сигнал «+27 В» в самолетный ответчик и МСРП-64М-2 для контроля правильности установки стандартного давления. Кроме того, в указателе вычисляется сигнал Н760 как алгебраическая сумма сигналов НОТН и Наэр. В самолетный ответчик в зависимости от его режимов работы выдаются сигналы НОТН и Н760.
Канал числа М. Сигнал числа М формируется из сигналов динамического и статического давления (рис. 11), выдается на блок БКМЭ-Ι и на указатель УМ-Ι-0,89 со шкалой от 0,3 до 1,0 через 0,01.
При
достижении индикации числа М![]() 0,88+0,01
в указателе замыкаются контакты и
включается два светосигнализатора
«Предел скорост.».
0,88+0,01
в указателе замыкаются контакты и
включается два светосигнализатора
«Предел скорост.».
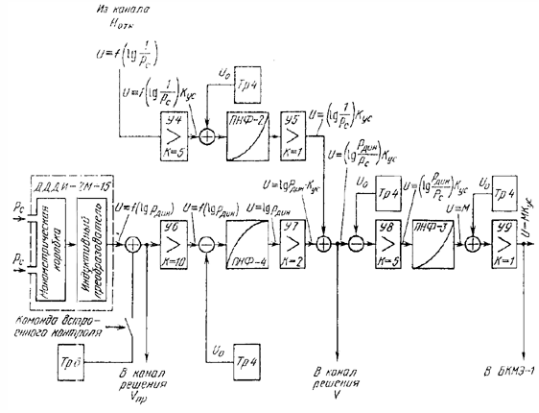
Рис. 11. Канал числа М СВС-ПН
Канал VИСТ. Сигнал VИСТ формируется из сигнала числа М с автоматическим учетом фактической температуры наружного воздуха (рис. 12).
Сигнал VИСТ выдается на указатель УСВП и через блок БПНП-10 в НВУ. Если переключатель «В-ΙΙ» установлен в положение «В», то в окне видна надпись «Возд.», и прибор индицирует истинную воздушную скорость от вычислителя ВСМВ-Ι-15М. При установке переключателя в положение «ΙΙ» в окне видна надпись «Пут.», и прибор индицирует путевую скорость, измеряемую системой ДИСС-013. Шкала указателя от 0 до 1000 км/ч. При полном обороте стрелки в верхнем окне появляется цифра Ι.
Р ис.
12. Канал высоты СВС-ПН
ис.
12. Канал высоты СВС-ПН
Канал ΔΗ. Сигнал ΔΗ формируется в двух корректорах заданной высоты КЗВ-0-15 (рис. 1), которые представляют собой барометрические электромеханические датчики высоты. На КЗВ-0-15 подается статическое давление, и корректор непрерывно следит за текущей высотой. При включении режима стабилизации высоты на пульте управления ПУ-46 корректор «запоминает» значение высоты и выдает сигнал ΔΗ – отклонение от этой высоты в канал тангажа САУ-154-2.
Канал ΔM. Сигнал ΔM формируется в блоке коррекции числа М БКМЭ-Ι (рис. 1). Блок непрерывно следит за изменением сигнала текущего значения числа М от вычислителя ВСМВ-Ι-15М. При включении режима стабилизации числа М на ПУ-46 блок «запоминает» значение числа М и выдает сигнал ΔM как отклонение от этого значения.
Система питания приборов полным и статическим давлением
Система питания барометрических приборов обеспечивает передачу статического и полного давления воздуха к барометрическим приборам и датчикам.
Система имеет три магистрали полного давления Рп, четыре основных и одну резервную магистрали статического давления Рст.
Система полного давления
Три приемника полного давления ППД-1М расположены в носовой части фюзеляжа, два на левом и один на правом борту.
От левого верхнего ППД-1М (рис. 13) полное давление подается на указатели скорости УС-И6 и КУС-730/1100 командира ВС, реле сигнализации «Придел скорости.»
От правого ППД -1М полное давление подается на приборы второго пилота (УС-И6, КУС-730/1100, МС), КУС-730/1100 бортинженера, на корректоры скорости КЗСП, на МСРП-64М-6, КЗ-63 и реле сигнализации «Выпусти шасси».
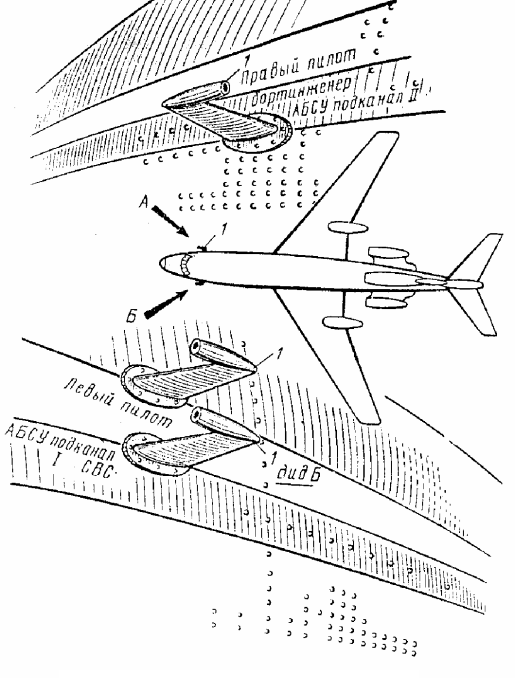
Рис. 13. Места расположения приемников полного давления ППД-1М
При неисправности левого верхнего ППД-1М установкой крана «Динамическое давление» в положение «Резервное» необходимо переключить УС-И6 и КУС-730/1100 командира ВС на правый ППД-1М. Кран расположен на боковом пульте командира ВС. Схема питания приборов и систем полным давлением показана на рисунке 14.
От левого нижнего ППД-1М полное давление подается на вычислитель ВСМВ-1-15М системы СВС, корректор скорости КЗСП, датчик критических углов атаки ДКУ, сигнализаторы скорости ССА блока контроля крена БКК-18 и МСРП-64М-6.
Электрообогрев ППД-1М питается постоянным током напряжением 27В через три автомата защиты «Обогрев ППД: лев., прав., АБСУ» на левой панели АЗС, три переключателя «Обогрев ППД: лев., прав., АБСУ» на верхнем электрощитке приборов. Под ним установлено три светосигнализатора, которые должны гореть при нажатии (вниз) переключателей в положение «Контроль исправности обогрева».
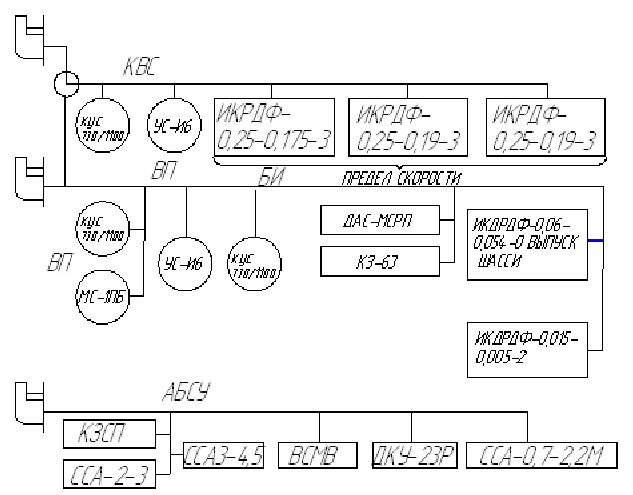
Рис. 14. Схема питания приборов и систем полным давлением
Система статического давления
Приемники статического давления внесены на специальные плиты, расположенные симметрично на обшивке фюзеляжа (шпангоут 29). Плиты обеспечивают стабильность аэродинамических поправок. Для осреднения статического давления при полете со скольжением приемники левого и правого бортов попарно соединены и образуют четыре основных магистрали (рис. 15.).
От первой магистрали статическое давление подается на приборы командира ВС, реле сигнализации «Предел скорост».
При неисправности в этих магистралях необходимо приборы переключать краном «Статическое давление» на резервный статический приемник, установленный в нише передней опоры.
Кран расположен на боковом пульте командира ВС. Рядом с краном установлен трафарет: «Внимание: при переключении на резервную статику во взлетно-посадочной конфигурации показания механических высотомеров (футомеров)» завышены на 50 м (165 футов), указателей скорости на 30 км/ч (16 узлов)».
От второй магистрали статического давления подается на приборы второго пилота и бортинженера. К3-63, МСРП-64М-6, ССОС и реле сигнализации «Выпусти шасси».
От третьей магистрали – на вычислитель ВСМВ-I-15М системы СВС, корректор скорости КЗСП, датчик критических углов атаки ДКУ, сигнализаторы скорости БКК-18, МСРП-64М-6, сигнализатор перенаддува, реле давления для включения радиовысотомера РВ-5М №1 и 2.
От четвертой магистрали – на два корректора высоты КЗВ-0-15 системы СВС-ПН-15-4Б.
Приемники статического давления обогреваются горячим воздухом от системы кондиционирования.

Рис. 15. Схема питания приборов и систем полным давлением
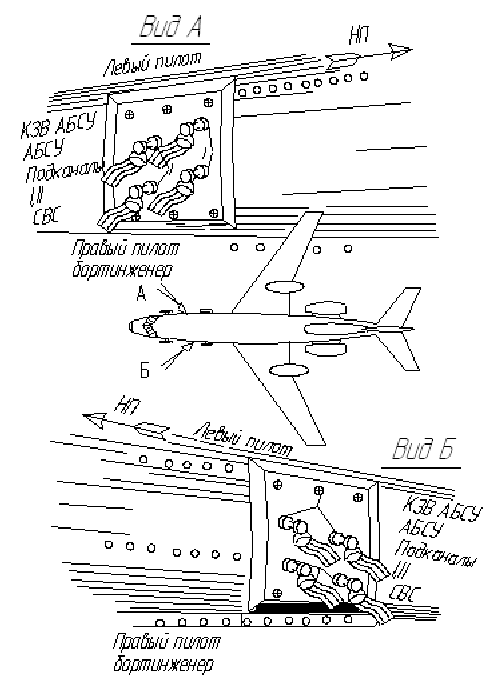
Рис. 16. Место расположения приемников статического давления
Термометр наружного воздуха ТНВ-15
ТНВ-15 предназначен и индикации температуры заторможенного потока наружного воздуха. На ВС установлено два комплекта ТНВ-15. Указатели ТНВ-15 расположены на приборных досках командира ВС и бортинженера, приемники П-5 установлены внизу фюзеляжа. Электропитание осуществляется постоянным током напряжением 27В, автомат защиты «ТВ-19, ТНВ-15»на правой панели АЗС.
Шкала указателя от -60 до +1500С через 50С, погрешностью 5-60. В полете при определении температуры наружного воздуха необходимо учитывать поправки на величину истинной скорости.
Автомат углов атаки и перегрузки АУСП-12КРИ
АУАСП-12КРИ измеряет и индицирует:
nу - вертикальную перегрузку;
αтек - текущий угол атаки;
αкр - критический угол атаки (αmax доп в эксплуатации). Кроме того, включает предупреждающую сигнализацию о подходе ВС к предельно допустимым перегрузкам и углам атаки.
По указателю УАП-12КРИ индицируется:
значение nу стрелкой по правой шкале в диапазоне от -1 до +3g через 0,1 g. Максимально допустимое значение nmax доп=(+2,5-3g) обозначено красным сектором; nу- значение max и min вертикальных перегрузок по стрелкам с желтыми концами;
значение индицируется стрелкой по левой шкале в диапазоне от 0 до 150 через 0,50;
значение αкр индицируется по левой шкале красным подвижным сектором.
При выпущенных закрылках в режимах взлета и посадки сектор автоматически устанавливается на 13(12)0 и остается неподвижным. При убранных закрылках сектор отрабатывается по сигналам αкр, которые рассчитываются датчиком критических углов (ДКУ) в зависимости от текущего значения числа М.
Выход ВС на критический режим полета определяется совмещением стрелки αтек с краем сектора αкр за 0,50 или стрелками nу с сектором допустимых перегрузок за 0,2g. При этом на указателе УАП-12КРИ мигает светосигнализатор, на приборной доске второго пилота горят светосигнализаторы «αкр» или «nу доп», звучит динамик.
Электропитание АУАСП-12КРИ осуществляется постоянным током напряжением 27В и переменным током напряжением 115В, частотой 400Гц; автомат защиты «АУАСП» на правой панели АЗС; выключатель «АУАСП- Питание» на верхнем электрощитке пилотов. Обогрев датчика текущих углов атаки (ДКУ) включается при включении обогрева левого ППД-1М.
Перед полетом:
при осмотре ВС снаружи убедится, что снят защитный колпачок с флюгера датчика ДУА;
включить электропитание, время готовности 5 мин;
на верхнем электрощитке пилотов переключатель «АУАСП Контроль- Сброс» нажать и удерживать в положении «Контроль».На указателе УАП стрелка и сектор по левой шкале должны совместиться на делении 13(12)0, стрелка по правой шкале должна совместится с сектором допустимых перегрузок. При этом должны мигать светосигнализатор на указателе и светосигнальные табло «αкр» и «nу доп» на приборной доске второго пилота, звучать динамик;
переключатель «АУАСП Контроль- Сброс» нажать в положение «Сброс» стрелки должны вернуться в исходное положение.
Для сброса показаний максимальной положительной (отрицательной) перегрузки вращением кремальеры в центре указателя подвести стрелки максимальных перегрузок к стрелки текущего значения перегрузки.
Стрелка αтек начинает работать в момент отрыва передней опоры шасси ВС.
Система сигнализации опасной скорости сближения с землей ССОС
Система ССОС предупреждает пилотов экипаж об опасной скорости сближения ВС с землей, включает сирену и в режим мигания два светосигнальных табло «Опасн. Земля» на приборных досках пилотов.
Система ССОС имеет вычислитель вертикальной скорости ВВС и вычислитель логический ВЛ. На них подается следующая информация:
Рст – статическое давление от второй магистрали статики;
nу – вертикальна перегрузка от блока датчиков линейных ускорений БДЛУ-1-3;
Нист – истинная высота от радиовысотомера РВ-5 № 1.
В результате комплексной обработки сигналов формируется сигналы вертикально барорадиоинерциальной скорости Vубри, т.е. скорости сближения ВС с землей и вертикальной бароинерциальной скорости Vуби, т.е. скорости снижения. Сигналы Vубри иVуби анализируются в вычислителе ВЛ с учетом изменения истинной высоты полета и при возникновении опасной ситуации полета включается световая и звуковая сигнализация.
Режим опасных ситуаций полета и действия экипажа сведены в таблицу 3 (см. Альбом схем).
Электропитание системы ССОС осуществляется постоянным током напряжением 27В, переменным током напряжением 115В, частотой 400Гц, переменным током напряжением 36В, частотой 400Гц, автомат защиты «ССОС» - на левой панели АЗС. Питание подается при включении выключателя «РВ-5 №1» на верхнем электрощитке пилотов. Щиток контроля системы ССОС установлен на верхнем щитке пульта бортинженера.