

|
|
bode plots - 10.25 |
|
|
10.6 PRACTICE PROBLEM SOLUTIONS |
|
|
||
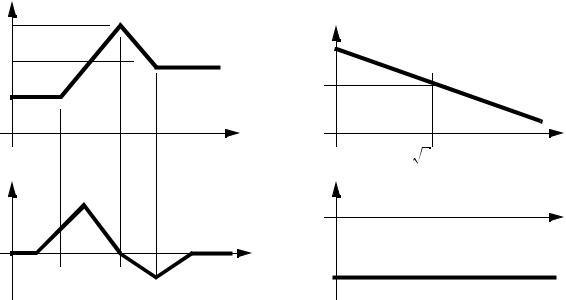
1. |
|
|
|
|
20dB |
|
|
|
|
0dB |
|
|
|
|
-20dB |
|
0dB |
|
-40dB/dec |
|
|
|
|
|
1 |
100 |
1000 |
|
|
----- |
-------- |
----------- |
|
5 |
2π |
2π |
2π |
|
|
------ |
||||
|
|
|
2 |
π |
90deg |
|
0deg |
|
|
|
|
|
|
|
-45deg |
|
-180deg |
|
|
bode plots - 10.26
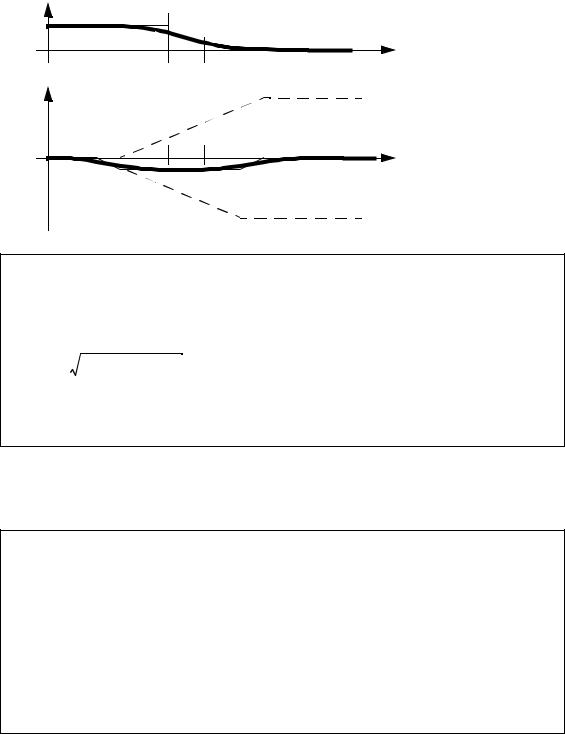
2.
|
y( D) |
( D + 10) ( D + 5) |
|
= |
( D + 10) |
|
|
|
||||||||||||
|
----------- |
= --------------------------------------- |
|
-------------------- |
|
|
|
|||||||||||||
|
x( |
D) |
|
( |
D + 5) |
2 |
|
|
|
|
( D + 5) |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
6dB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0dB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.8 |
1.6 |
|
|
|
|
|
|
||||
90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.8 |
1.6 |
|
|
|
|
|
|
||||
-90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x( t) |
= 20 cos ( 9t + 0.3) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Aside: the numbers should be obtained from the graphs, but I have calculated them |
||||||||||||||||||||
|
y |
= |
( D + 10) |
|
= |
|
9j + 10 |
5 – 9j |
= |
50 + 81 – 45j |
= 1.236 – 0.425j |
|
||||||||
|
- |
-------------------- |
|
---------------- |
|
------------- |
|
------------------------------- |
|
|||||||||||
|
x |
|
( D + 5) |
|
|
9j + 5 |
|
5 – 9j |
|
25 + 81 |
|
|
||||||||
|
y |
= |
1.236 |
2 |
+ 0.425 |
2 |
atan |
–0.425 |
= 1.307 –0.3312rad |
|
||||||||||
|
- |
|
|
---------------- |
|
|||||||||||||||
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
1.236 |
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x- = 2.33dB –9.49° |
|
|
|
|
|
|
|
|
|
|
|
||||||||
y( t) |
= 20( 1.307) sin ( 9t + 0.3 + ( –0.3312) ) |
|
|
|||||||||||||||||
y( t) |
= 26.1 sin ( 9t – 0.031) |
|
|
|
|
|
|
|
|
|
||||||||||
Aside: This can also be done entirely with phasors in cartesian notation |
|
|||||||||||||||||||
y |
= |
( D + 10) |
= |
9j + 10 |
5 – 9j |
= |
50 + 81 – 45j |
1.236 – 0.425j |
|
|||||||||||
- |
-------------------- |
---------------- |
|
------------- |
------------------------------- = |
|
||||||||||||||
x |
|
( D + 5) |
|
|
|
9j + 5 |
5 – 9j |
|
|
25 + 81 |
|
|
||||||||
x |
= |
20( cos ( 0.3rad) |
+ j sin ( 0.3rad) ) |
= |
19.1 + 5.91j |
|
|
|||||||||||||
|
|
y |
|
|
( 1.236 – 0.425j) ( 19.1 + 5.91j) = 26.1 – 0.813j = 26.1 |
–0.031 |
||||||||||||||
---------------------------- = |
||||||||||||||||||||
19.1 + 5.91j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
y( t) |
= 26.11 sin ( 9t – 0.031) |
|
|
|
|
|
|
|
|
|||||||||||
bode plots - 10.27
(cont’d
Aside: This can also be done entirely with phasors in polar notation |
|
|||||||||
y |
( D + 10) |
= |
|
9j + 10 |
= |
13.45 0.733 |
= |
13.45 |
0.733 – 1.064 = 1.31 |
–0.331 |
- = |
--(--D------+-----5---)-- |
---------------- |
10.30-------------------1.064------------ |
10.30------------ |
||||||
x |
|
|
9j + 5 |
|
|
|
|
|||
x = 20 0.3 |
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
20-----------------0.3 = 1.31 –0.331 |
|
|
|
|
|
|
||||
y = 1.31( 20) ( – 0.331 + 0.3) |
= 26.2 –0.031 |
|
|
|
||||||
y( t) |
= 26.2 sin ( 9t – 0.031) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
bode plots - 10.28
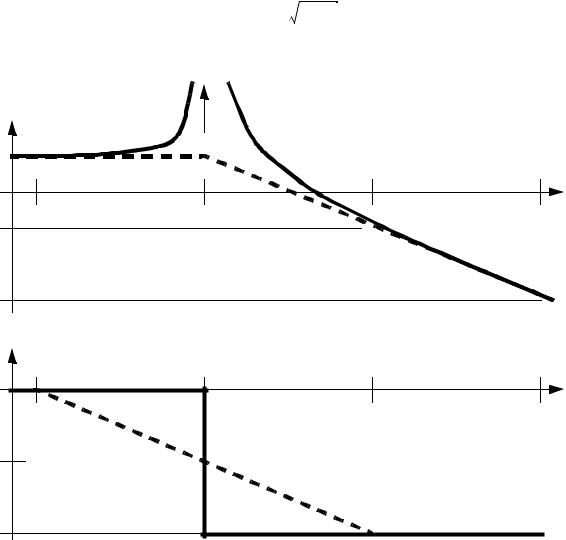
3.
for the numerator, (zero) |
1000 |
rad |
= 159Hz |
-------- |
|||
|
|
s |
|
for the denominator, (poles) |
|
D2 + 2ω |
nζ D + |
ω n2 = D2 + 5D + 100 |
||||||||
|
|
|
|
|||||||||
|
|
|
|
ω |
n2 = 100 |
|
|
|
|
|||
|
|
|
|
|
ω |
n |
= |
rad |
fn |
= 1.59Hz |
||
|
|
|
|
10-------- |
||||||||
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
2ω |
nζ |
= 5 |
|
|
|
|
||
|
|
|
|
|
ζ |
|
|
5 |
|
|
|
|
|
|
|
|
= |
------------- |
= 0.25 |
(underdamped) |
|||||
|
|
|
|
2 |
( 10) |
|||||||
|
|
|
|
fd |
|
= fn |
1 – ζ |
2 |
= 1.54Hz |
|
||
for the initial gain |
G( 0) |
= |
0 + 1000 |
|
= 10 = 20dB |
|
||||||
|
|
------------------------------------- |
|
|
||||||||
|
|
|
|
02 + 5( 0) + 100 |
|
|
|
|
||||
Gain |
|
|
|
|
|
|
|
|
|
|
|
|
(dB) |
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
159 |
f(Hz) |
|
|
|
|
|
|
|
|
|
|
|
|
|
0.1 |
1 |
1.54 |
|
10 |
|
|
|
|
100 |
|
1000 |
|
|
|
|
|
|
|
|
|
|
-40dB/dec |
|
||
-60 |
|
|
|
|
|
|
|
|
|
|
|
-20dB/dec |
|
|
|
|
|
|
|
|
|
|
|
|
|
-80 |
|
|
|
|
|
|
|
|
|
|
|
|
phase |
|
|
|
|
|
|
|
|
|
|
|
|
(deg) |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0.154 |
|
|
|
|
15.4,15.9 |
|
|
1590 f(Hz) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
0.1 |
1 |
1.54 |
|
10 |
|
|
|
|
100 |
159 |
1000 |
|
-90 |
|
|
|
|
|
|
|
|
|
|
|
|
-180 |
|
|
|
|
|
|
|
|
|
|
|
|
bode plots - 10.30
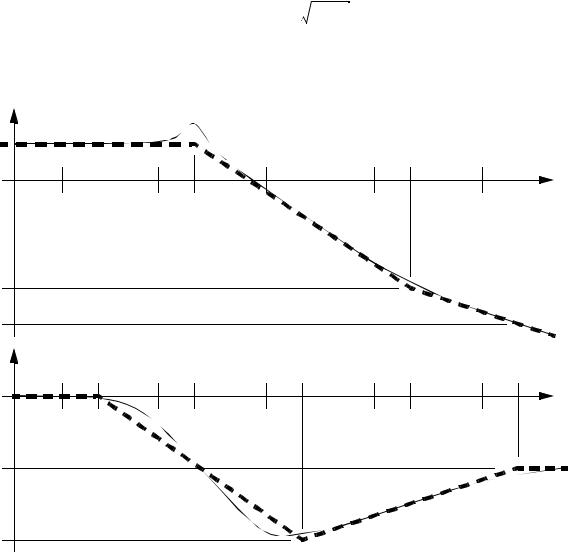
6.
a)x 0.0667 m
---= ----------------------- ---
F D2 + 33.3 N
b) ω |
= 1 |
D = |
1j |
|
|
|
x |
|
0.0667 |
|
|
–3 |
m |
--- |
|
---------------------------- |
|
|
|
--- |
F |
= |
( 1j) 2 + 33.3 |
= 2.07 |
× 10 |
|
0rad N |
F( t) = 10 cos ( t + 1) N |
|
|
|
|||||
|
Fω( |
) |
= ( 10 1rad) N |
|
|
|
||
|
|
x |
|
|
|
–3 |
|
m |
------------------------------- |
|
|
|
|
--- |
|||
( 10 1rad) N = 2.07 |
× 10 0rad N |
|||||||
|
x( ω |
) |
= 2.07 × 10 |
–3 |
|
|
m |
( 10 1rad) N |
|
|
|
--- |
|||||
|
0rad N |
|||||||
|
x( ω |
) |
= ( 10) 2.07 × |
10–3 ( 0rad + 1rad) m |
||||
|
x( ω |
) |
= 0.0207 1radm |
|
|
|
||
|
x( t) |
|
= 0.0207 cos ( t + 1) m |
|
||||
c)F D2 + 33.3 N
--= ----------------------- ---
x 0.0667 m
bode plots - 10.31
d) |
for the denominator, (poles) |
D2 + 2ω |
nζ D + ω |
n2 = |
D2 + 33.3 |
|||
|
|
|
ω |
|
rad |
fn |
= |
0.918Hz |
|
|
|
n = 5.77-------- |
|||||
|
|
|
|
|
s |
|
|
|
|
|
|
ζ |
= 0 |
(undamped) |
|
||
|
|
|
fd |
= fn |
1 – ζ 2 |
= 0.918Hz |
||
|
|
|
G( 0) = |
0.0667 |
|
|
|
|
|
for the initial gain |
--------------- |
= 2 = –54dB |
|||||
|
|
|
|
|
33.3 |
|
|
|
Gain |
|
∞ |
|
|
|
|
|
|
(dB) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-54 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
f(Hz) |
|
|
|
|
|
|
|
|
|
|
0.1 |
1 |
|
|
|
10 |
|
100 |
-94 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
-40dB/dec |
|
|
|
|
|
|
|
|
|
|
-134 |
|
|
|
|
|
|
|
-20dB/dec |
|
|
|
|
|
|
|
|
|
phase |
|
|
|
|
|
|
|
|
(deg) |
|
|
|
|
|
|
|
f(Hz) |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.1 |
1 |
|
|
|
10 |
|
100 |
|
|
|
|
|
|
|||
-90 |
|
|
|
|
|
|
|
|
-180 |
|
|
|
|
|
|
|
|
e) |
x( t) |
= ( – 0.020 cos ( 5.77t) |
+ 0.020) m |
|
|
|
||
f) |
x( t) |
= ( – 0.2162 cos ( 5.77t) + 0.2162) m |
|
|
|
|||
bode plots - 10.32
7.
a) |
· |
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
y = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
· |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
v = – v – 7y + F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
b) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yi + 1 |
= |
|
yi |
+ h |
|
|
|
|
0 1 |
|
|
yi |
+ |
0 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
vi + 1 |
|
|
|
|
vi |
|
|
|
|
|
|
|
|
|
–7 –1 |
|
|
vi |
|
F |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
given |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
y0 |
|
|
|
= |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
F = 10 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
v0 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
using h=0.001s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
y1 |
= |
1 |
|
|
+ 0.001 |
|
0 |
1 |
|
|
|
|
1 |
+ |
0 |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
v1 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–7 –1 |
|
|
0 |
|
10 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.428m |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
etc.. until |
|
|
|
|
|
|
y100 |
= |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v100 |
|
|
|
|
|
|
|
--- |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.000 s |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
c) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
y( t) = ( – 0.437e–0.5t cos ( 2.598t – 0.19) + 1.429) m |
|||||||||||||||||||||||||||||||||||||||||||||
bode plots - 10.33
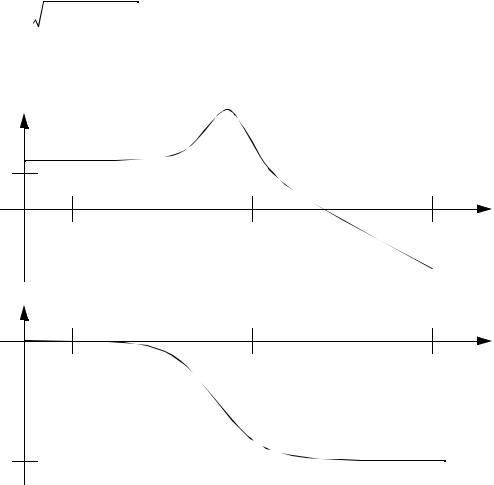
d) |
|
y |
= |
|
1 |
= |
|
|
1 |
= |
1 |
|
|
--- |
|
|
-------------------------- |
----- |
---------- |
------------------- |
2--)----+-----j--(---ω----)- |
|
|||||
|
F |
|
|
D2 + D + 7 ( jω ) 2 |
+ jω + 7 ( 7 – ω |
|
|||||||
|
|
y |
|
= |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
-- |
|
------------------------- |
--------- |
---- |
- |
|
|
|
|
||
|
|
F |
|
|
|
2 |
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
( 7 – ω ) |
+ |
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
θ |
|
|
0 |
|
|
= ( 0 – angle( ω |
2 |
2 |
||||
|
|
= ---------------------------------------------- |
, 7 – ω ) ) |
= –angle( ω , 7 – ω ) |
|||||||||
|
|
|
|
|
|
angle( ω |
, 7 – ω 2) |
|
|
|
|
||
-20dB
-40dB
0.01Hz |
1Hz |
100Hz |
0deg |
|
|
0.01Hz |
1Hz |
100Hz |
-180deg |
|
|
bode plots - 10.34
8.
a) |
x |
= |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
--- |
------------- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
5 + D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b) |
x |
= |
1 |
1 |
= |
|
|
|
|
1 0 |
|
|
= |
|
|
1 |
|
|
|
|
ω |
|
|
|||
|
--- |
------------- |
= -------------- |
----------------------------------------------- |
--------------------- – atan |
|
--- |
|
|
|||||||||||||||||
|
F 5 + D 5 + jω |
|
|
|
2 |
+ ω |
2 |
atan |
|
ω |
|
|
5 |
2 |
+ ω |
2 |
|
|
5 |
|
|
|||||
|
|
|
|
|
|
|
5 |
|
|
|
--- |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
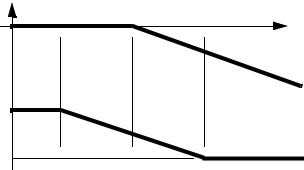
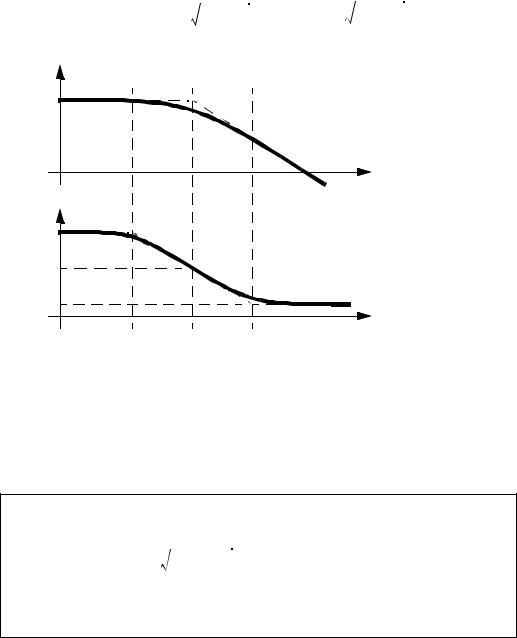
c) |
|
gain(dB) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
initial gain |
= |
20log |
= |
–14dB |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
----------- |
|||||||||||
|
-14dB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
5 + 0 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
corner freq. = |
|
0.8Hz |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
----- = |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
-20dB/dec |
|
|
|
2π |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
phase(deg) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
0° |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–45° |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–90° |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.08Hz |
0.8Hz |
|
|
|
8Hz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
d) |
f = |
100 |
16Hz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-------- = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
2π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
From the Bode plot, |
|
|
gain = –40dB = 0.01 |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
phase = –90° |
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
= –--rad |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x( t) |
= |
10( 0.01) |
sin |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
100t – -- |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
Aside: verified by calculations, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
x |
|
|
1 |
|
|
|
|
|
100 |
|
= |
0.00999 –1.521 |
|
|
|
|||||||
|
|
|
------------- = -------------------------- – atan |
-------- |
|
|
|
|
||||||||||||||||||
|
|
|
10 0 |
5 |
2 |
+ 100 |
2 |
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
x |
= ( 10 0) ( 0.00999 –1.521) |
= 0.0999 –1.521 |
|
|
|
|
|
|
|||||||||||||||
|
|
|
x( t) = 0.0999 sin ( 100t – 1.521) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||