

input output equations - 39.1
39. TOPICS IN DEVELOPMENT
Topics:
Objectives:
39.1 UPDATED DC MOTOR MODEL
ea = KEω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Te = KTia |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Te – TL – Cdω 2 = JDω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Te = JDω + Cdω 2 + TL |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
va = raia + laDia + ea |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
va = ia( ra + laD) + ea |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
va = ia( ra + laD) + KEω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Te |
|
+ laD) + KEω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
va = ------( ra |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
KT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( JDω |
|
+ C |
ω 2 |
+ T ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
d |
|
|
|
|
L |
|
+ laD) + KE |
ω |
|
|
|
|
|
|
|
|
|
||||||
va = ------------------------------------------------( ra |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
KT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
( JDω + C |
ω |
2 + T ) ( r |
a |
+ l |
D) + K |
E |
K |
T |
ω |
= K |
T |
v |
a |
|
|
|
|
|
|
||||||||
d |
|
|
|
|
L |
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
JraDω + Cdraω 2 + TLra + JlaDDω + laDCdω 2 + laDTL + KEKTω |
= KTva |
|
|||||||||||||||||||||||||
ω·· ( Jl ) +ω · ( Jr |
a |
+ l |
ω C ) +ω ( K |
E |
K ) +ω |
2( C r ) = v |
( K ) + T |
L |
( –r ) + T· |
( –l ) |
|||||||||||||||||
a |
|
|
|
a |
|
|
|
d |
|
|
|
T |
|
|
d a |
a |
T |
a |
L |
a |
|||||||
input output equations - 39.3
ω·· + ω· A + ω B + ω 2C = vaD + TLE + T·LF
input output equations - 39.4
39.2 ANOTHER DC MOTOR MODEL
|
|
|
|
|
|
|
ia |
|
|
|
Te |
- |
|
|
|
|
TL |
|
ω r |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
vs + |
|
|
|
|
1 |
|
|
|
1 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
--------------------- |
|
|
|
Ka |
|
|
|
|
|
-------------------- |
|
|||||||||
|
|
|
|
|
|
LaD + ra |
|
|
|
|
+ |
|
|
|
|
JD + Bm |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ka |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
where,
Ka |
= |
motor speed constant |
La |
= motor armature inductance |
|
ra |
= |
motor armature resistance |
J = inertia of rotor |
||
Bm = damping of rotor |
||
vs |
= |
voltage applied to armature |
ia |
= |
armature current |
Te |
= |
effective motor torque |
TL |
= |
load torque |
ω r |
= motor speed |
|

input output equations - 39.5
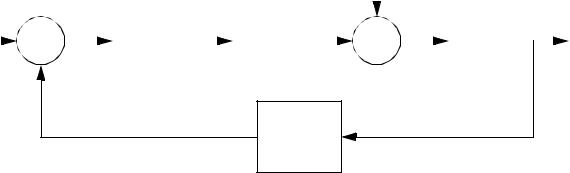
Motor parameters can be measured by applying a voltage and holding (stalling) the shaft. The stalled motor torque, and the current are measured. When stalled, the load and effective torques are equal, and the feedback loop is zero, allowing the simplified system block diagram. This allows the calculation of the motor speed coefficient directly.
v |
s |
|
1 |
ia |
|
|
TL |
|
|
|
--------------------- |
|
Ka |
||||
|
|
|
|
LaD + ra |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ka = |
TL |
|
|
|
|
|||
----- |
|
|
|
|
||||
|
|
|
ia |
|
|
|
|
|
The resistance of the windings can be found by direct measurement with a DMM, but can also be verified by using the steady state current and voltages.
ia |
= |
1 |
= |
1 |
= |
1 |
--- |
L-------------------as + ra |
L--------------------------a( j0) |
---- |
|||
vs |
|
|
+ ra |
ra |
||
ra |
= |
vs |
|
|
|
|
--- |
|
|
|
|
||
|
|
ia |
|
|
|
|
The inductance of the windings can be found using the time constant - phase shift
????????????????
ia |
= |
1 |
|
--- |
L-------------------as + ra |
|
|
vs |
|
XXXXXXXXXXXXXXX |

input output equations - 39.7
|
|
|
|
|
|
ia |
|
|
Te |
- |
|
|
|
|
TL |
ω r |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
vs + |
|
|
|
1 |
|
|
1 |
|
|||||||||
|
|
|
|
|
|
||||||||||||
|
--------------------- |
|
|
Ka |
|
|
|
-------------------- |
|||||||||
|
|
|
|
|
LaD + ra |
|
|
|
+ |
|
|
|
JD + Bm |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ka
ia = ( vs – Kaω |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
-------------------- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
r) L |
a |
D + r |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Dia( La) + ia( ra) = vs – Kaω r |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
Di |
|
|
= v |
|
|
|
|
1 |
|
|
+ ω |
|
|
–Ka |
|
+ i |
|
|
–ra |
|||||||||||||||||||||
|
|
|
|
|
a |
|
|
|
|
|
|
|
----- |
|
|
r |
--------- |
|
a |
------- |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
s L |
|
|
|
|
L |
a |
|
|
|
|
|
|
|
L |
a |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ω r = ( Kaia – TL) |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
-------------------- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
JD + B |
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Dω r( J) +ω r( Bm) = Kaia – TL |
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
Dω |
|
|
|
= i |
|
|
|
|
Ka |
|
+ T |
|
|
–1 |
+ |
ω |
|
|
|
–Bm |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
----- |
|
|
L |
----- |
|
r |
--------- |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
r |
|
|
|
|
a |
J |
|
|
|
|
|
J |
|
|
|
|
|
|
|
|
J |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
–ra |
–Ka |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
d |
|
i |
|
|
|
------- --------- |
|
|
i |
|
|
|
|
|
|
|
----- |
|
|
|
|
|
|
v |
|
|
|
|
|
||||||||||||||||
|
a |
= |
|
L |
a |
|
L |
a |
|
|
|
a |
+ |
|
|
L |
a |
|
|
|
|
|
|
|
s |
|
|
|
|||||||||||||||||
---- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
dt |
ω |
r |
|
|
K |
a |
|
–B |
m |
|
ω |
|
r |
|
|
|
|
|
|
|
|
–1 |
|
|
|
T |
L |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
----- |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
----- --------- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
J |
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|