

6. Модуль связи с индуктивными датчиками м2230
Модуль
М2230 предназначен для связи с датчиками
индуктивного типа (вращающийся
трансформатор, индуктосин или резольвер)
и обеспечивает преобразование сигналов
датчиков в коды перемещения, которые
могут быть непосредственно интер-претированы
управляющей проце-ссорной системой. К
модулю воз-можны подключения до четырех
датчиков индуктивного типа и одно-го
датчика касания с выходным сигналом
дискретного типа.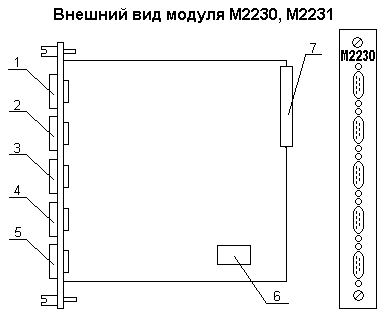
К модулю возможно подключе-ние датчиков, обеспечивающих измерение в однофазном ампли-тудном режиме.
Электрические
характеристики сигналов датчиков
индуктивного типа могут находиться в
следую-щем диапазоне:
Номинальное напряжение питания датчика (двойная ампли-туда) - 14 V;
Номинальная частота запиты-вающего напряжения - 10 kHz;
Максимальный суммарный ток запитки датчиков - 500 mA;
Размещение интерфейсных разъемов на плате показано на рис. 6.1. к разъему (поз. 1) подключается датчик касания, а к разъемам (поз. 2, 3, 4, 5) датчики индуктивного типа.
Соответствие контактов разъемов наименованию подключаемых цепей приведены в табл18
Таблица 18
Разъем для подключения датчика индуктивного типа
|
Конт. |
Цепь |
|
1 2 3 4 5 6 7 8 9 |
Входной сигнал Sin-1 Входной сигнал Cos -1 Выходное напряжение Sin-1 (10 kHz) Напряжение плюс 15 V Общий (GND) Входной сигнал Sin-2 Входной сигнал Cos -2 Выходное напряжение Sin-2 (10 kHz) Напряжение минус 15 V |
Тип разъема – розетка, CANNON на 9 контактов.
Таблица
19
Разъем для подключения датчика касания
|
Конт. |
Цепь |
|
1 2 3 4 5 6 7 8 9 |
Сигнал датчика касания
Общий (GND)
Напряжение + 5 V |
Тип разъема – розетка, CANNON на 9 контактов.
Максимальная длина кабеля связи с датчиками не более 100 m.
Подключение датчиков производится с помощью экранированных кабелей, наличие которых в комплекте поставки должно быть оговорено в карте заказа при заключении договора на поставку.
При работе модуля с датчиками типа индуктосин используются усилители запитывающих и выходных сигналов.
Для датчиков, действующих в режиме амплитуды, источником питания является синусоидальный сигнал частотой 10 kHz.
Каждый датчик имеет на выходе два сигнала; сигнал СИНУСА и сигнал КОСИНУСА.
Замер положения каждого из датчиков циклически повторяется с периодичностью, равной приблизительно 2 ms. В результате каждого замера может быть экстраполировано следующее значение путем оценки как скорости, так и ускорения движения. Это позволяет при каждом замере подавать на АЦП только разность между экстраполированным и истинным положением. Все аналоговые цепи, предназначенные для формирования сигнала ошибки, работают на переменном токе, что позволяет исключить влияние смещения и дрейфов элементов. Затем сигнал ошибки преобразуется в цифровую форму и направляется в процессор, предназначенный для вычисления следующей экстраполяции и формирования текущего значения для центрального процессора. Фактически, при каждом измерении (имея положение и скорость, полученные в предыдущем измерении) может быть вычислена новая скорость и ускорение, а затем и путь к моменту следующего измерения. Связь с центральным _еалии_сором осуществляется через двухпортовую память.
Микропереключатели (поз.6 рис. 6.1), используются только при настройке в условиях предприятия-изготовителя. Положение переключателей при функционировании модуля следующее (рис. 6.2.):