

Пуск асинхронных двигателей
Способы пуска. При пуске двигателя по возможности должны удовлетворяться основные требования: процесс пуска должен осуществляться без сложных пусковых устройств; пусковой момент должен быть достаточно большим, а пусковые токи - по возможности малыми. Иногда к этим требованиям добавляют и другие, обусловленные особенностями конкретных приводов, в которых используют двигатели: необходимость плавного пуска, максимального пускового момента и пр.
Практически используют следующие способы пуска: непосредственное подключение обмотки статора к сети (прямой пуск); понижение напряжения, подводимого к обмотке статора при пуске; подключение к обмотке ротора пускового реостата.
Прямой пуск. Этот способ применяют для пуска асинхронных двигателей с короткозамкнутым ротором. Двигатели этого типа малой и средней мощности обычно проектируют так, чтобы при непосредственном подключении обмотки статора к сети возникающие пусковые токи не создавали чрезмерных электродинамических усилий и превышений температуры, опасных с точки зрения механической и термической прочности основных элементов машины.
В асинхронных двигателях отношение L/R сравнительно мало (особенно в малых двигателях), поэтому переходный процесс в момент включения характеризуется весьма быстрым затуханием свободного тока. Это позволяет пренебречь свободным током и учитывать только установившееся значение тока переходного процесса.
Двигатели обычно пускают с помощью электромагнитного выключателя К - магнитного пускателя (рис. 4.27, а) и разгоняют автоматически по естественной механической характеристике М (рис. 4.27,6) от точки П, соответствующей начальному моменту пуска, до точки Р, соответствующей условию М = Мст. Ускорение при разгоне определяется разностью абсцисс кривых М и Мст и моментом инерции ротора двигателя и механизма, который приводится во вращение. Если в начальный момент пуска Мп < Мст , двигатель разогнаться не сможет.
|
|
Рис. 4.27. Схема прямого пуска асинхронного двигателя и графики изменения моментов и тока |
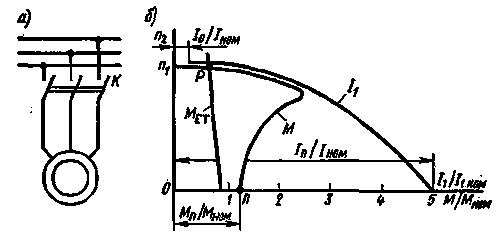
Значение начального пускового момента можно получить из формулы (4.46а), приняв s = 1:
(4.58)
Мп = m1 U12R'2 /{w1 [(R1 + R'2 )2 + (X1 + Х'2 )2 ]}.
Отношение моментов Мп /Мном = kп.м называют кратностью начального пускового момента. Для двигателей с короткозамкнутым ротором мощностью 0,6—100 кВт ГОСТом установлено kп.м= 1,0÷2,0; мощностью 100-1000 кВт - kп.м = 0,7÷1,0.
Получение кратностей пускового момента, больших регламентированных ГОСТом, обычно нежелательно, так как это связано либо с увеличением активного сопротивления ротора (см. 4.58), либо с изменением конструкции ротора (см. § 4.11), что ухудшает энергетические показатели двигателя.
Недостатком данного способа пуска кроме сравнительно небольшого пускового момента является также большой бросок пускового тока, в пять — семь раз превышающий номинальное значение тока.
Несмотря на указанные недостатки, пуск двигателя путем непосредственного подключения обмотки статора к сети широко применяют благодаря простоте и хорошим технико-экономическим свойствам двигателя с короткозамкнутым ротором — низкой стоимости и высоким энергетическим показателям (η, cos φ1, kм и др.).
Пуск при пониженном напряжении. Такой пуск применяют для асинхронных двигателей с короткозамкнутым ротором большой мощности, а также для двигателей средней мощности при недостаточно мощных электрических сетях. Понижение напряжения может осуществляться следующими путями:
а) переключением обмотки статора с помощью переключателя с нормальной схемы Δ на пусковую схему Y. При этом напряжение, подаваемое на фазы обмотки статора, уменьшается в √3 раз, что обусловливает уменьшение фазных токов в √3 раз и линейных токов в 3 раза. По окончании процесса пуска и разгона двигателя до номинальной частоты вращения обмотку статора переключают обратно на нормальную схему;
|
|
|
Рис. 4.28. Схемы включения асинхронного двигателя при пуске с понижением напряжения |
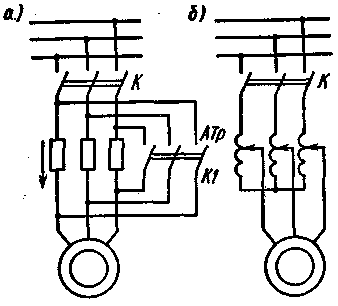
б) включением в цепь обмотки статора на период пуска добавочных активных (резисторов) или реактивных (реакторов) сопротивлений (рис. 4.28, а). При этом на указанных сопротив лениях создаются некоторые падения напряжения ΔUдоб, пропорциональные пусковому току, вследствие чего к обмотке статора подается пониженное напряжение. По мере разгона двигателя снижается ЭДСЕ2s , индуцированная в обмотке ротора, а следовательно, и пусковой ток. В результате уменьшается падение напряжения ΔUдоб на указанных сопротивлениях и автоматически возрастает приложенное к двигателю напряжение. После окончания разгона добавочные резисторы или реакторы замыкаются накоротко контактором К1 ;
в) подключением двигателя к сети через понижающий автотрансформаторАТр (рис. 4.28,6), который может иметь несколько ступеней, переключаемых в процессе пуска соответствующей аппаратурой.
Недостатком указанных методов пуска путем понижения напряжения является значительное уменьшение пускового и максимального моментов двигателя, которые пропорциональны квадрату приложенного напряжения, поэтому их можно использовать только при пуске двигателей без нагрузки.
|
|
Рис. 4.29. Механические характеристики при включении обмотки статора двигателя по схемам Y и Δ (а) и графики изменения М и I1 при пуске двигателя путем переключения обмотки статора со Y на Δ (б) |
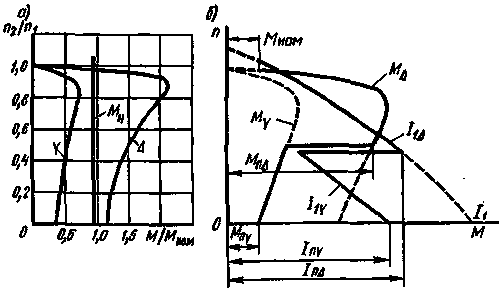
На рис. 4.29 для примера приведены механические характеристики двигателя при номинальном и пониженном напряжении, т. е. при соединении обмотки статора по схемам Y и Δ, а также графики изменения тока I1 и момента М при пуске двигателя путем переключения обмотки статора со Y на Δ. При соединении по схеме Y максимальный и пусковой момент уменьшаются в три раза, вследствие чего двигатель не в состоянии осуществить пуск механизма с нагрузочным моментом Мн.
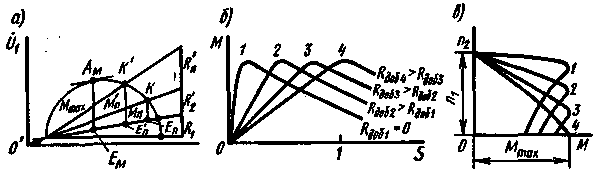
Пуск с помощью реостата в цепи ротора. Этот способ применяют для пуска двигателей с фазным ротором. Если в цепь ротора включить пусковой реостат Rп, то активное сопротивление цепи ротора увеличится, вследствие чего точка К на круговой диаграмме (рис. 4.30, а) сместится ближе к точке О (точка К'). При этом максимальный момент (отрезок АмЕм) не изменяется, а пусковой момент возрастает от значения Мп до М'п, так как увеличивается отрезок КЕп, пропорциональный этому моменту. Одновременно повышается критическое скольжение, а поэтому зависимость М =f(s) сдвигается в область больших скольжений, а зависимость п2= f(М) — в область меньших частот вращения (рис. 4.30,6 и в, кривые 1—4).
Для того чтобы пусковой момент был равен максимальному, необходимо так подобрать сопротивление пускового реостата Rп, чтобы точка К' находилась вблизи точки Ам. Это условие выполняется при R'п + R'2 + R1 ≈ X1 + X'2 . Включение сопротивления R пуменьшает также и пусковой ток двигателя, так как в этом случае
(4.59)
In = U1 /√(R'n + R'2+ R1 )2 + (X1 + Х'2 )2.
Пусковой реостат имеет обычно три — шесть ступеней (рис. 4.31, а), что позволяет в процессе пуска постепенно уменьшать пусковое сопротивление, поддерживая высокое значение пуско-вого момента двигателя. Сначала двигатель пускается по характеристике 4 (рис. 4.31,6), соответствующей сопротивлению
|
|
|
Рис. 4.30. Круговая диаграмма при включении реостата в цепь ротора асинхронного двигателя и получаемые при этом механические характеристики |
|
|
|
Рис. 4.31. Схема реостатного пуска асинхронного двигателя |
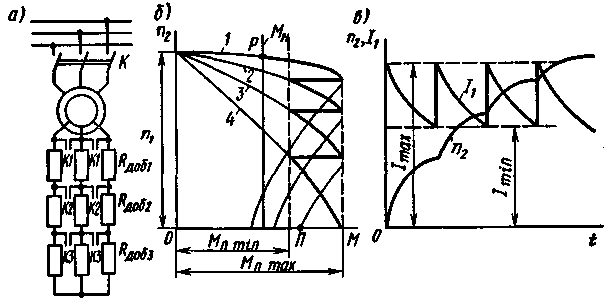
пускового реостата Rп3 = Rдоб1 + Rдоб2 + Rдоб3 , и развивает вращающий момент Мп.mах . По мере увеличения частоты вращения вращающий момент М уменьшается и может стать меньше некоторого момента Mп.min . Поэтому при M = Mп.min часть пускового реостата Rдоб3 выводят, замыкая контактор КЗ . Вращающий момент при этом мгновенно возрастает до Мп.mах , а затем с увеличением частоты вращения изменяется по характеристике 3, соответствующей сопротивлению реостата Rп2 = Rдоб1 + Rдоб2 . При дальнейшем уменьшении момента М до Mп.minчасть реостата Rдоб2 снова выключается контактором К2 и двигатель переходит на работу по характеристике 2, соответствующей сопротивлению Rп1 = Rдоб1 . Таким образом, при постепенном (ступенчатом) уменьшении сопротивления пускового реостата вращающий момент двигателя изменяется от Мп.mах до Mп.min , а частота вращения возрастает по ломаной кривой, показанной на рис. 4.31,6 жирной линией. В конце пуска пусковой реостат полностью выводят контактором К1, обмотка ротора замыкается накоротко, и двигатель переходит на работу по естественной характеристике 1. Выключение отдельных ступеней пускового реостата в процессе разгона двигателя может осуществляться вручную или автоматически. Таким образом, посредством реостата, включенного в цепь ротора, можно осуществить пуск двигателя при Mп ≈ Мmах и резко уменьшить пусковой ток.
На рис. 4.31, в показан характер изменения тока I1 и частоты вращения n2 при пуске двигателя рассматриваемым способом. Ток также изменяется по ломаной кривой между двумя крайними значениями Imах и Imin.
Недостатком данного способа является его относительная сложность и необходимость применения более дорогих двигателей с фазным ротором. Кроме того, указанные двигатели имеют несколько худшие рабочие характеристики, чем двигатели с короткозамкнутым ротором такой же мощности (кривые η и cos φ1 проходят ниже). В связи с этим двигатели с фазным ротором применяют только при тяжелых условиях пуска, когда необходимо развивать максимально возможный пусковой момент.
29.вопрос Регулирование частоты вращения асинхронного двигателя
Частота вращения асинхронного двигателя
n = n1 (1 – s) = (60f1/p) (1-s) (85)
Из этого выражения видно, что ее можно регулировать, изменяя частоту f1 питающего напряжения, число пар полюсов р и
 Рис.
266. Схема переключения катушек обмотки
статора (одной фазы) для изменения числа
полюсов: а — при четырех полюсах; б —
при двух полюсах
Рис.
266. Схема переключения катушек обмотки
статора (одной фазы) для изменения числа
полюсов: а — при четырех полюсах; б —
при двух полюсах
скольжение s. Последнее при заданных значениях момента на валу Мвн и частоты f1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения частоты питающего напряжения. Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
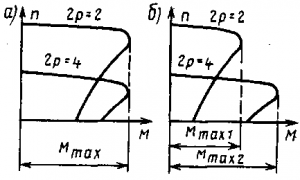 Рис.
267. Механические характеристики
двухскоростных асинхронных двигателей
с постоянным наибольшим моментом (а) и
постоянной мощностью (б)
Рис.
267. Механические характеристики
двухскоростных асинхронных двигателей
с постоянным наибольшим моментом (а) и
постоянной мощностью (б)
 Рис.
268. Механические характеристики
асинхронного двигателя при регулировании
частоты вращения путем включения
реостата в цепь обмотки ротора
Рис.
268. Механические характеристики
асинхронного двигателя при регулировании
частоты вращения путем включения
реостата в цепь обмотки ротора
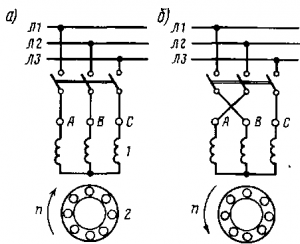 Рис.
269. Схемы подключения асинхронного
двигателя к сети при изменении направления
его вращения
Рис.
269. Схемы подключения асинхронного
двигателя к сети при изменении направления
его вращения
В двигателе же с фазным ротором в этом случае надо было бы изменять число полюсов обмотки ротора, что сильно усложнило бы его конструкцию, поэтому такой способ регулирования частоты вращения используется только в двигателях с коротко-замкнутым ротором. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Регулирование путем включения в цепь ротора реостата. При включении в цепь обмотки ротора реостата с различным сопротивлением (Rп4, RпЗ, Rп2 и т. д.) получаем ряд реостатных механических характеристик 4, 3 и 2 двигателя. При этом некоторому нагрузочному моменту Мном (рис. 268) будут соответствовать меньшие частоты вращения n4, n3, n2 и т. д., чем частота nе при работе двигателя на естественной характеристике 1 (при Rп = 0). Это способ регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.).
Изменение направления вращения. Для изменения направления вращения двигателя нужно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка чередования тока в фазах обмотки статора. Например, если максимумы токов поступают в фазы обмотки статора 1 (рис. 269, а) в следующем порядке: фаза А — фаза В — фаза С, то ротор 2 двигателя будет вращаться по часовой стрелке. Если же подавать их в такой последовательности: фаза В — фаза А — фаза С, то ротор начнет вращаться против часовой стрелки. Для этой цели необходимо изменить схему соединения обмоток статора с сетью, переключив две любые фазы (провода). Например, зажим А обмотки статора, который ранее был соединен с линейным проводом Л1, нужно переключить на провод Л2, а зажим В этой обмотки, соединенный ранее с Л2, переключить на провод Л1 (рис. 269,б). Такое переключение можно осуществить обычным переключателем.
30.вопрос Многоскоростные асинхронные двигатели
|
Многоскоростные электродвигатели |
|
|
Многоскоростные
электродвигатели - асинхронные
двигатели с несколькими ступенями
частоты вращения, предназначены для
привода механизмов, требующих
ступенчатого регулирования частоты
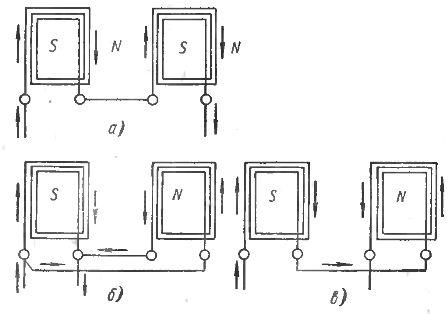
вращения. Многоскоростные электродвигатели - электродвигатели специальной конструкции. Они имеют особую обмотку статора и нормальный короткозамкнутый ротор. Наиболее простым способом получения двух разных чисел пар полюсов является устройство на статоре асинхронного двигателя двух независимых обмоток. Электротехнической промышленностью выпускаются такие двигатели с синхронными скоростями вращения 1000/1500 об/мин. Существует, однако, ряд схем переключения проводников обмотки статора, при которых одна и та же обмотка может создать различные числа полюсов. Простое и широко распространенное переключение такого рода показано на рис. 1, а и б. Катушки статора, включенные последовательно, образуют две пары полюсов (рис. 1, а). Те же катушки, включенные в две параллельные цепи, как это показано на рис. 1, б, образуют одну пару полюсов. Промышленность выпускает многоскоростные однообмоточные электродвигатели с последовательно-параллельным переключением и с отношением скоростей 1:2 с синхронными скоростями вращения 500/1000, 750/1500, 1500/3000 об/мин. Описанный выше способ переключения не является единственным. На рис. 1, в приведена схема, образующая такое же число полюсов, как и схема, представленная на рис. 1, б. Наибольшее распространение в промышленности получил, однако, первый способ последовательно-параллельного переключения, так как при таком переключении от обмотки статора может быть выведено меньше проводов, а следовательно, и переключатель может быть проще.
Рис. 1. Принцип переключения полюсов асинхронного двигателя. Три фазовые обмотки могут быть включены в трехфазную сеть звездой или треугольником. На рис. 2, а и б показано широко распространенное переключение, при котором электродвигатель для получения меньшей скорости включается треугольником с последовательным соединением катушек, а для получения большей скорости — звездой с параллельным соединением катушек (так называемой двойной звездой). Наряду с двухскоростными электропромышленность выпускает также трехскоростные асинхронные двигатели. В этом случае статор электродвигателя имеет две отдельные обмотки, одна из которых обеспечивает две скорости путем описанного выше переключения. Вторая обмотка, включаемая обычно в звезду, обеспечивает третью скорость. При наличии на статоре электродвигателя двух независимых обмоток, каждая из которых допускает переключение полюсов, можно получить четырехскоростной электродвигатель. Числа полюсов подбирают при этом так, чтобы скорости вращения составили нужный ряд. Схема такого электродвигателя представлена на рис. 2, в. Следует заметить, что вращающееся магнитное поле будет наводить в трех фазах неработающей обмотки три э. д. с, одинаковые по величине и сдвинутые по фазе на 120°. Геометрическая сумма этих электродвижущих сил, как известно из электротехники, равна нулю. Однако, вследствие неточной синусоидальности фазовых э. д. с. тока сети, сумма этих э. д. с. может быть отличной от нуля. В этом случае в замкнутой неработающей обмотке возникает ток, нагревающий эту обмотку. В целях предотвращения этого явления схему переключения полюсов составляют таким образом, чтобы неработающая обмотка была разомкнута (рис. 12, в). Вследствие небольшой величины указанного выше тока у некоторых электродвигателей, разрыва замкнутого контура неработающей обмотки иногда не делают. Выпускаются двухобмоточные трехскоростные двигатели, имеющие синхронные скорости вращения 1000/1500/3000 и 750/1500/3000 об/мин, и четырехскоростные двигатели, имеющие 500/750/1000/1500 об/мин. Двухскоростные двигатели имеют шесть, трехскоростные — девять и четырехскоростные — 12 выводов к переключателю полюсов. Следует заметить, что существуют схемы двухскоростных двигателей, которые при одной обмотке позволяют получить скорости вращения, отношение которых не равно 1:2. Такие электродвигатели обеспечивают синхронные скорости вращения 750/3000, 1000/1500, 1000/3000 об/мин. Путем использования специальных схем одной обмотки можно получить также три и четыре различных числа пар полюсов. Такие однообмоточные многоскоростные электродвигатели отличаются значительно меньшими габаритными размерами, чем двухобмоточные двигатели с теми же параметрами, что весьма важно для станкостроения. Кроме того, у однообмоточных электродвигателей несколько выше энергетические показатели и меньше трудоемкость изготовления. Недостатком однообмоточных многоскоростных электродвигателей является наличие большего числа проводов, вводимых к переключателю. Сложность переключателя определяется, однако, не столько числом выведенных наружу проводов, сколько числом одновременно осуществляемых переключений. В связи с этим были разработаны схемы, позволяющие при наличии одной обмотки получить три и четыре скорости при относительно простых переключателях.
Рис. 2. Схемы переключения полюсов асинхронного двигателя. Такие электродвигатели выпускаются станкостроительной промышленностью при синхронных скоростях 1000/1500/3000, 750/1500/3000, 150/1000/1500, 750/1000/1500/3000, 500/750/1000/1500 об/мин. Вращающий момент асинхронного двигателя может быть выражен известной формулой
где Iг — ток в цепи ротора; Ф — магнитный поток двигателя; φ2— угол сдвига фаз между векторами тока и э. д. с. ротора. |


31.вопрос Рабочие характеристики асинхронного двигателя.