

Студеникин - Технические средства судовождения
.pdfψ =ψ m sin 2πft, |
(3.22) |
где ψт – его амплитудное значение, f – частота световой волны. Тогда в момент приема этих лучей ПС и луч 1, вращающийся по часовой стрелке, и луч 2, обратный ему, будут иметь фазу, зависящую от длины пути, который они прошли до встречи с ПС. Если длину световода обозначить через L, то при отсутствии угловой скорости
ω вращения контура каждый луч до встречи с ПС проходит одно и тоже расстояние L и их текущая фаза колебаний будет одинакова. Примем ее за начальную фазу, и будем полагать, что она равна нулю.
Если угловая скорость ω не рана нулю, то луч 1 до встречи с ПС пройдет рас- стояние на величину L меньшее, чем это имело место при ω=0,
а луч 2 – на такую же величину большее. Очевидно, что закон изменения рас- стояния L определяется следующим равенством:
L = ωRt. |
(3.23) |
Время t, которое затрачивается лучами на прохождение этого расстояния, состав- ляет:
Dt = |
L |
= |
ωR |
t, |
(3.24) |
c |
|
||||
|
|
c |
|
||
где с – скорость распространения светового луча.
В результате сокращения или удлинения времени движения луча его фаза также изменится относительно принятого нулевого значения на угол
ϕ = 2πf × Dt = 2πf |
ωR |
t = 2π |
ωR |
t. |
(3.25) |
|
|
||||
|
c |
λ |
|
||
Здесь использована известная зависимость λ = с f . С учетом этого функция, опре-
деляющая закон изменения первого луча во времени, примет вид:
ψ1 |
æ |
ωR ö |
(3.26) |
|
=ψ1m sin(2πft +ϕ )=ψ1m sin 2πç f + |
λ |
÷t. |
||
|
è |
ø |
|
|
В свою очередь, аналогичная функция для второго луча может быть записана следующим образом:
ψ2 |
æ |
ωR ö |
(3.27) |
|
=ψ2m sin(2πft -ϕ )=ψ2m sin 2π ç f - |
λ |
÷t. |
||
|
è |
ø |
|
|
Как это видно из выражений (3.26) и (3.27) смещение фаз лучей выродилось в
изменение их частоты на величину доплеровского сдвига |
fд = |
ωR |
. Относительный |
|||||||
λ |
||||||||||
|
|
|
|
|
|
|
|
|
||
сдвиг частот обеих лучей |
|
|
|
|
|
|
|
|
||
f + |
ωR |
− ( f − |
ωR |
) = |
2ωR |
. |
|
(3.28) |
||
λ |
|
|
|
|||||||
|
|
λ |
λ |
|
|
|
||||
Таким образом, относительное смещение частот двух лучей оказывается про- порциональным угловой скорости вращения контура вокруг оси, перпендикулярной его плоскости.
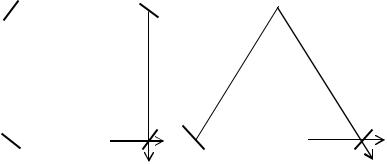
На практике замкнутые контуры, имеющие кольцевую форму, как правило, не используются. Чаще всего они имеют или квадратную, или треугольную формы
(рис. |
3.15). Изменение направления движения лучей осуществляется с помощью |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
зеркал (З) или призм полно- |
||
З |
|
|
|
З |
|
З |
|
|
го |
внутреннего |
отражения |
|||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
светового луча. |
Призменная |
|
|
|
|
|
|
|
|
|
|
|
|
|
конструкция резонатора по- |
||
|
|
|
|
|
|
|
|
|
|
|
|
зволяет отказаться от слож- |
||
|
|
|
|
Л |
|
ППЗ |
|
Л |
ППЗ |
ной |
технологии |
изготовле- |
||
|
|
|
|
|
|
ния диэлектрических зеркал |
||||||||
З |
|
|
|
|
|
З |
|
|
|
|
|
высокого качества, но уве- |
||
Рис. 3.15 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
личивает число границ раз- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
дела двух сред и сложность регулировки периметра резонатора. Съем выходного
сигнала с кольцевого лазера осуществляется с помощью полупрозрачного зеркала ППЗ, пропускающего часть световой энергии на приемник излучения. В данном
случае зависимость доплеровского сдвига частот от угловой скорости вращения КЛГ определяется несколько иным выражением [2,4]:

fд = |
4S |
ω, |
(3.29) |
|
λL |
||||
|
|
|
где L и S – периметр и площадь кольцевого резонатора, соответственно. Как видим,
и в этом случае величина доплеровского сдвига частот пропорциональна угловой скорости вращения основания, на котором установлен КЛГ, причем коэффициент пропорциональности, как правило, оказывается достаточно большим, что свиде- тельствует о высокой чувствительности гироскопа данного типа. Так, для КЛГ с ре- зонатором квадратной формы и стороной, равной 10 см, этот коэффициент состав- ляет, примерно, 106.
Для выделения доплеровского сдвига частот, как правило, используются фото- умножители. Выходящие через ППЗ световые лучи образуют на катоде фотоумно- жителя интерференционную картину (чередование темных и светлых полос), ско- рость перемещения которой по катоду пропорциональна искомому сдвигу частот. Перемещение интерференционных колец обусловливает появление на выходе фото- умножителя гармонического сигнала, частота которого пропорциональна скорости их перемещения. В дальнейшем этот гармонический сигнал преобразуется в цифро- вую форму.
Следует отметить, что относительная разность фаз световых лучей КЛГ опреде- ляет значение его угла поворота в пространстве.
Потенциальная точность КЛГ определяется, в основном, наличием спонтанного излучения активной среды, некогерентного по отношению к генерируемым в лазере волнам. Наличие этого излучения приводит к появлению нестационарной ошибки,
нарастающей во времени примерно пропорционально 
 t . При этом для типичных лазеров коэффициент пропорциональности имеет порядок 1×10−4 [2].
t . При этом для типичных лазеров коэффициент пропорциональности имеет порядок 1×10−4 [2].
Основной проблемой лазерной гироскопии является синхронизация (или захват) частот встречных волн, обусловленная обратным рассеянием на элементах резона- тора. При наличии этого эффекта оба луча как бы “прилипают” к стенкам контура и относительный доплеровский сдвиг частот лучей исчезает. Одним из возможных
путей преодоления этого недостатка является создание искусственного начального расщепления частот встречных волн. Для создания такого расщепления может быть использована анизотропия различного рода, в том числе и принудительное враще- ние КЛГ с постоянной скоростью.
Весьма перспективным в этом направлении оказался метод виброподставки, за- ключающийся в принудительном покачивании КЛГ вокруг его оси чувствительно-
сти с частотой порядка 200 – 400 Гц и амплитудой в несколько угловых минут. Та- кой подход позволяет снизить минимальную измеряемую угловую скорость до ве- личин, которые определяются шумовыми характеристиками КЛГ. Указанный метод оказался очень эффективным и широко используется в настоящее время.
Другим методом, получившим в последние годы довольно широкое распростра- нение, является равномерное вращение КЛГ на большие углы (порядка 7200) с пе- риодическим реверсом (так называемая rate-bias техника). Этот метод позволяет практически на порядок снизить случайный дрейф гироскопа, но требует его уста- новки на подвижную платформу, что усложняет конструкцию изделий.
Имеется возможность устранить эффект захвата использованием четырехчастот- ного кольцевого лазера, в котором работают две пары лучей.
Наряду с уже указанными системами КЛГ включает в себя:
∙систему стабилизации мощности излучения, поддерживающую неизменной постоянную составляющую интенсивности одного из выходных лучей, либо ам- плитуду сигнала биений встречных волн;
∙систему, поддерживающую постоянство оптической длины периметра резо- натора КЛГ;
∙систему минимизации влияния обратного рассеивания, которая регулирует
положение одного из зеркал КЛГ; Чрезвычайно важным для работы КЛГ является качество изготовления зеркал.
Именно успехи в этой области, обусловленные значительным прогрессом в тех- нологии, обеспечили существенное повышение точностных характеристик рас- сматриваемых приборов и их конкурентоспособность по отношению к традици- онным гироскопам.
3.10.Принцип действия волоконно-оптического гироскопа
Вотличие от КЛГ в волоконно-оптических гироскопах (ВОГ) замкнутый кон- тур образован многовитковой катушкой оптического световолокна. В этом случае
при наличии вращения основания прибора с угловой скоростью Ω фазовый сдвиг φ лучей, распространяющихся по контуру в двух взаимно-противоположных направ- лениях (фаза Саньяка), будет определяться следующим выражением [5]:
ϕ = |
8πNS |
Ω, |
(3.30) |
|
λc |
||||
|
|
|
где N – число витков катушки, S – средняя площадь витка, λ – длина волны светово- го луча, с – скорость света. Из последнего выражения вытекает основное преимуще-
ство ВОГ над КЛГ: величина его масштабного коэффициента за счет большого чис- ла витков световода существенно больше. Регистрируемая прибором разность фаз может составлять 10-5 ÷ 10-7 радиан, что соответствует угловой скорости вращения контура, равной 1 ÷ 10-3 град/час. Кроме этого [30]:
∙в ВОГ отсутствует синхронизация противоположно бегущих лучей вблизи нулевого значения угловой скорости вращения, что позволяет измерять очень малые угловые скорости, без необходимости конструировать сложные в на- стройке устройства смещения нулевой точки;
∙конструкция ВОГ целиком выполняется в виде твердого тела (в перспективе полностью на интегральных оптических схемах), что облегчает эксплуата- цию и повышает надежность по сравнению с КЛГ;
∙ВОГ измеряет скорость вращения, в то время как КЛГ фиксирует прираще- ние скорости; конфигурация ВОГ дает возможность «чувствовать» реверс направления вращения.
∙благодаря возможности создания ВОГ полностью на интегральных оптиче- ских схемах они имеют малые габариты и массу, а также ничтожное потреб- ление энергии, что имеет немаловажное значение при использовании ВОГ на борту;
∙ВОГ имеет большой динамический диапазон измеряемых угловых скоростей (в частности, например, одним прибором можно измерять скорость поворота от 1 град/час до 300 град/с [30]);
∙в виду того, что не затрачивается время на раскрутку не существующего ро- тора, ВОГ практически мгновенно готов к работе;
∙рассматриваемые гироскопы имеют низкую чувствительность к большим ли- нейным ускорениям и, следовательно, работоспособны в условиях воздейст- вия высоких механических перегрузок;
∙благодаря диэлектрической природе волокна, ВОГ имеет высокую помехо- устойчивость, нечувствительность к мощным внешним электромагнитным
воздействиям и к проникающей гамма-нейтронной радиации, особенно в диапазоне 1,3 мкм;
Волоконные оптические гироскопы, исполняя роль датчиков угловой скорости, могут быть связаны непосредственно, без дополнительного карданового подвеса, с корпусом объекта, параметры движения которого измеряются. Это значительно уп- рощает конструкцию и стоимость систем управления или стабилизации, основу ко- торой они составляют.
Механические гироскопы имеют так называемые гиромеханические ошибки, ко- торые особенно сильно проявляются при маневрировании объекта. Эти ошибки еще более значительны, если система управления конструируется с жестко закреплен- ными или «подвешенными» непосредственно к телу носителя датчиками. Перспек- тива использования дешевого оптического датчика вращения, который способен ра- ботать без гиромеханических ошибок особенно в инерциальной системе управления, есть еще одна причина особого интереса к оптическому гироскопу.
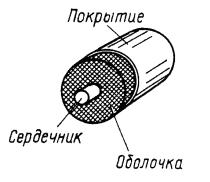
Волоконный кольцевой интерферометр представляет собой многовитковую ка- тушку, выполненную из одномодового оптического волокна. В отличие от много- модового волокна она обеспечивает качественную пе- редачу светового сигнала, имеющего только один тип (одну моду) распределения параметров электромагнит- ного излучения (светового потока). Конструктивно эти типы волокон различаются только диаметром сердечни- ка (рис. 3.16) — световедущей части, внутри которой коэффициент преломления чуть выше, чем в перифе-
Рис. 3.16 рийной части — оболочке. Различие коэффициентов преломления обеспечивает распространение света внутри сердечника. У одномодо- вых волокон диаметр сердечника составляет примерно 5-10 мкм, что создает труд- ности при соединении волокон этого типа и введении в них светового луча лазера. Многомодовые волокна имеют больший диаметр сердечника (примерно 50 мкм), что существенно облегчает их соединение друг с другом. Однако при использовании оптических волокон для когерентных измерений, когда из этих волокон формирует- ся интерферометр, важным преимуществом одномодовых волокон является воз- можность передачи информации о фазе оптической волны, что неосуществимо с помощью многомодовых волокон.
К общим достоинствам оптических волокон следует отнести:
∙широкополосность (предполагается до нескольких десятков терагерц);
∙малые потери (минимальные 0,154 дБ/км);
∙малый (около 125 мкм) диаметр;
∙малая (приблизительно 30 г/км) масса;
∙эластичность (минимальный радиус изгиба 2 мм);
∙механическая прочность (выдерживает нагрузку на разрыв примерно 7 кг);
∙отсутствие взаимной интерференции;
∙безындукционность (практически отсутствует влияние электромагнитной индукции);
∙взрывобезопасность (гарантируется абсолютной неспособностью волокна быть причиной искры);
∙высокая электроизоляционная прочность (например, волокно длиной 20 см
выдерживает напряже-
ние до 10000 B);
∙ высокая коррозионная стойкость, особенно к химическим раствори- телям, маслам, воде.
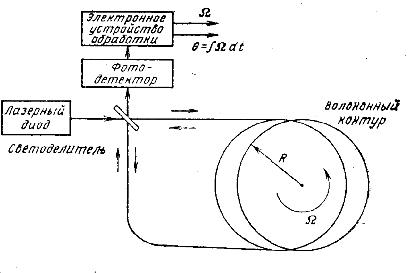
Простейшая принципиаль-
ная схема ВОГ представлена на рис. 3.17. Лазерный диод явля- ется источником света, который
поступает на полупрозрачное зеркало (светоделитель), разделяющее его на два одинаковых луча, вращающиеся по волоконному контуру в противоположных направлениях. На выходе из волоконного
контура лучи вновь поступают на зеркало и далее в фотодетектор и электронное устройство обработки принятого сигнала. Фотодетектор вырабатывает напряжение, пропорциональное относительному смещению фаз лучей, которое, в свою очередь, пропорционально скорости вращения контура вокруг своей оси. Электронное уст-
ройство обработки принятого сигнала вырабатывает значения измеряемой скорости и путем ее интегрирования – угла поворота контура. С образцами рассматриваемых приборов и их техническими параметрами можно познакомиться в работе [24].
В заключение следует отметить, что в дальнейшем развитие волоконной гиро- скопии будет идти [1]:
∙в направлении повышения стабильности ВОГ за счет повышения качества элементов (модуляторов, светоделителей, поляризаторов и волоконного кон- тура), их температурной стабильности и совершенствования техники контроля взаимной юстировки элементов при сборке, а также разработки конструкций, нечувствительных к механическим и акустическим вибрациям и темпе- ратурным градиентам;
∙в направлении повышения предельной чувствительности и стабильности, что
может привести к вытеснению лазерных гироскопов волоконными из области навигационной гироскопии;

∙в направлении удешевления и миниатюризации приборов за счет серийного производства интегральных модулей, что существенно расширит спрос на
ориентационные гироскопы средней точности (до 1 град/ч).
Наряду с оптическими гироскопами в литературе рассматриваются возможности создания гироскопических приборов на основе эффекта Саньяка для волн самой разной природы и разных частотных диапазонов. Поскольку эффект Саньяка обрат- но пропорционален длине волны, то увеличения чувствительности можно ожидать с укорочением длины волны. Известны измерения эффекта Саньяка на рентгеновских волнах, на волнах де Бройля электронов, нейтронов и различных атомов. Однако к настоящему времени новые предложения (ввиду сложности реализации) серьезной конкуренции оптической гироскопии составить не могут.
3.11. Микромеханические гироскопические датчики информации
В настоящее время экономический критерий, определяющий целесообразность производства того или иного вида гироскопической техники, обусловил интерес к новым образцам инерциальных датчиков информации – микромеханическим гиро- скопам (ММГ) и акселерометрам (ММА). Разработка ММГ началась с середины 80 годов прошлого столетия [22] и в настоящее время многие фирмы в России и за ру- бежом уже освоили их производство. В качестве примеров таких изделий можно на- звать [22,26]: кремниевые ММГ и ММА фирмы "Rockwell International", разрабо- танные в лаборатории им. Ч. Дрейпера (США); кварцевые ММГ и ММА фирмы "Systran Donner" (США); пьезокерамические ММГ фирмы "Murata" (Япония). Среди отечественных фирм, занимающихся разработкой подобных датчиков, следует вы- делить: ЦНИИ машиностроения, НИИ прикладной механики им. академика В.И.Кузнецова, НПК "Вектор" (все - г. Москва); НИИ командных приборов, Центр микротехники и диагностики России, ГУАП, АОЗТ “Гирооптика” (все г. С. – Петер- бург) НПП “Темп-Авиа” (г. Арзамас). Принципиальной особенностью этих датчиков
является использование при их производстве материалов и технологий современной твердотельной микроэлектроники. Микромеханические инерциальные датчики имеют встроенную электронику управления и обработки информации, малую массу и габариты (доли миллиграммов и единицы миллиметров [5]), малое энергопотреб- ление (доли милливатт), высокую устойчивость к внешним воздействиям. Исполь- зуемая технология обеспечивает массовое производство и, как следствие этого, уни- кально низкую стоимость (единицы и десятки долларов) микромеханических датчи- ков.
ММГ, как правило, строится по схеме камертона. Отличительная особенность заключается в миниатюризации конструкции, использовании высокодобротных не- металлических материалов (монокристаллический кремний, плавленый кварц) и технологий фотолитографии и диффузионного травления. Вибрации чувствительно- го элемента возбуждаются либо пьезоэлектрическим датчиком, либо микродвигате- лем электростатического типа. Датчики съема и преобразования полезного сигнала и другие встроенные элементы цепей управления также выполняются на основе со- временной микроэлектронной технологии. Наряду с камертонной схемой подвеса
|
|
|
|
|
z |
1 |
|
|
|
|
|
|
|
|
чувствительного элемента име- |
||
|
Вид сверху |
|
10 |
|
|
|
|
|
|
|
ются схемы, аналогичные дина- |
||||||
|
10 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мически |
настраиваемым гиро- |
||
3 |
|
|
|
|
|
|
|
3 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
скопам, с той лишь разницей, |
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
что в ММГ ротор не вращается, |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
2 |
||||||
2 |
|
|
|
|
|
|
|
|
|
а совершает |
колебания вокруг |
||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
o |
|
|
|
|
|
|
|
х |
главной оси. Рассмотрим более |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
подробно |
некоторые варианты |
||
|
|
|
|
|
|
|
|
|
|
1 |
|||||||
5 |
|
|
4 |
|
2 |
4 |
|
5 |
|
построения ММГ. |
|||||||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
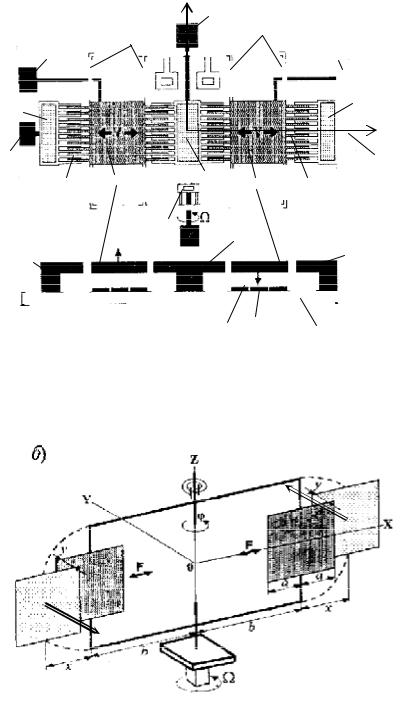
На рис. 3.18 в двух проекци- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
ях представлена конструктивная |
|||
Вид сбоку |
F1 |
|
2 |
|
|
|
|
|
|
|
схема ММГ камертонного типа. |
||||||
2 |
|
|
|
|
|
2 |
|
В плане размеры этого датчика |
|||||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
F2 |
|
|
|
|
|
|
составляют, примерно, 2х4 мм, |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а его толщина – 20 мкм [4]. |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Рис. 3.18 |
|
|
|
8 |
|
6 |
|
|
|
|
|
Инерционные массы 4, под- |
||||
|
|
|
9 |
7 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вешенные |
в |
прямоугольной |
рамке с помощью четырех торсионов 10 и образующие с ней чувствительный эле- мент (ЧЭ), связаны с основанием 6 в так называемой якорной точке 11 с помощью упругих элементов. Эти элементы позволяют ЧЭ поворачиваться вокруг оси oz на небольшие углы. В рабочем состоянии массы 4 приводятся в колебательное движе-
|
|
ние с резонансной частотой и |
|||
|
|
линейной скоростью V электро- |
|||
|
|
||||
|
F2 |
статическими двигателями 2. С |
|||
|
|
этой целью и двигатели и массы |
|||
|
|
4 |
имеют специальные гребеш- |
||
|
|
ки 5, образующие в собранном |
|||
|
|
состоянии воздушные |
конден- |
||
|
|
саторы. При подаче переменно- |
|||
|
F1 |
го |
напряжения |
на |
обкладки |
|
|
этих конденсаторов возникают |
|||
|
|
силы F (рис.3.19), обусловлен- |
|||
|
Рис. 3.19 |
ные взаимодействием |
электри- |
||
|
ческих полей, |
порождающие |
|||
названное движение. Всего используется три двигателя, два из которых расположе- ны слева и справа датчика, а один в его центре. При отсутствии вращения прибора колебания инерционных масс происходят во взаимно противоположных направле-
ниях в плоскости, параллельной его основанию. Уравнения, определяющие эти ко- лебания, учитывая кинематическую схему прибора, представленную на рис. 3.19, могут быть записаны в виде:
m&x&+ μx x& + cx x = F0 sinωt, |
(3.31) |
где т – масса чувствительного элемента, μх и сх – коэффициенты сил демпфирования и упругости, действующих на массу при ее движении вдоль оси ох, F0 – амплитуд- ное значение силы, развиваемой электростатическим двигателем, ω - частота изме- нения этой силы.
При наличии вращения основания с угловой скоростью Ω вокруг оси oz, возни- кают силы F1 и F2 кориолиса, вынуждающие перемещаться инерционные массы. Это приводит к повороту ЧЭ вокруг оси oz на угол φ и смещению масс относительно его плоскости на величину у. В связи с тем, что смещение х инерционных масс носит периодический характер, закон изменения угла φ и смещения у также будет перио- дическим. Частота указанных колебаний будет определяться частотой питания элек- тростатических двигателей, а их амплитуда будет зависеть от угловой скорости Ω.
При исследовании работы прибора в первом приближении можно считать, что параметры колебаний чувствительного элемента в основном определяются момен- тами сил кориолиса, что позволяет записать уравнение, этих колебаний в следую- щем виде [5]:
Izϕ&& + μϕϕ& + cϕϕ = 4(ϕ& + Ω)[x&(x + b) + y&y], |
(3.32) |
где Iz – момент инерции чувствительного элемента относительно оси oz, μφ и сφ – ко- эффициенты моментов сил демпфирования и упругости. В свою очередь, закон из- менения смещения инерционных масс вдоль оси оу определяется следующим урав- нением:
m&y& + μy y& + cy y = −mϕ&&(x + b) − 2mx&(ϕ& + Ω), |
(3.33) |
где μу и су – коэффициенты демпфирования и упругости, имеющие место при сме- щении инерционной массы вдоль оси оу. Как видим, последние два уравнения взаи- мозависимы, и их исследование следует проводить совместно.
Измерение величины смещения инерционных масс, несущего информацию об угловой скорости поворота основания прибора, производится с помощью датчиков линейного перемещения 7 емкостного типа (рис. 3.18). Рядом с этими датчиками расположены электроды электростатических датчиков момента 8 и 9, один из кото- рых используется для введения программных сигналов, а другой - для настройки всей системы в резонанс. Питание к элементам схемы подводится через специаль- ные электроды 1 и 3.
Описанный прибор является одной из наиболее ранних моделей ММГ. Исследо- вания качества его работы показали, что оно в значительной степени зависит как от уровня технологического совершенства прибора, так и от температуры окружающей среды. Это обусловило необходимость разработки иных вариантов датчика, у кото- рых влияние указанных факторов было бы не столь велико. С конструктивными и кинематическими схемами некоторых вариантов ММГ можно познакомиться в [24].