

Студеникин - Технические средства судовождения
.pdf3.12. Общая характеристика акселерометров
Акселерометры предназначены для измерения ускорений движения той точки объекта, с которой они связаны. С принципиальной стороны каждый акселерометр содержит в своей основе некоторую инерционную массу m (чувствительный эле- мент), определенным образом связанную с корпусом прибора. При движении осно- вания прибора с ускорением V& на указанную массу будет действовать сила F инер- ции, которая в соответствие с законом Ньютона равна:
|
|
= mV& |
. |
(3.34) |
F |
Данная сила уравновешивается реакцией подвеса инерционной массы. При этом, как правило, происходит изменение ее положения, которое также определяется си- лой F и, как следствие, ускорением V& . Таким образом, измеряя параметры реакции подвеса или смещение инерционной массы, мы приобретаем возможность оценки интересующего нас ускорения:
F |
|
|
V& = m . |
(3.35) |
Равен- |
ство (3.35) показывает, что ускорение V& соответствует силе, действующей на еди- ницу инерционной массы, то есть удельной силе, которая измеряется в Ньютонах. Поэтому по инициативе академика А. Ю. Ишлинского нередко в литературе акселе- рометры называют ньютонометрами.
В течение многих лет ученые всего мира уделяли достаточно большое внимание разработке различных вариантов рассматриваемого прибора, в результате чего было создано множество самых разнообразных их образцов. Однако, несмотря на это можно указать основные признаки, которые позволяют объединить акселерометры в отдельные группы. Так, по характеру связи между выходным сигналом
прибора и ускорением движения его основания все акселерометры можно разделить на три группы:
§простые, у которых выходной сигнал пропорционален измеряемой величине;
§однократно интегрирующие, в которых выходной сигнал пропорционален скоро- сти движения основания прибора;
§двукратно интегрирующие, выходной сигнал которых пропорционален переме- щению основания в инерциальном пространстве.
По характеру перемещения инерционной массы различают:
§акселерометры с линейным перемещением подвижной системы (линейные аксе- лерометры);
§акселерометры с угловым перемещением подвижной системы (маятниковые ак- селерометры)
§акселерометры, основанные на использовании физических свойств твердых тел и жидкостей.
По способу подвеса инерционной массы (подвижной системы) ак-
селерометры делятся на имеющие:
§упругий подвес;
§подвес на жестких опорах;
§гидравлический подвес;
§электромагнитный или электростатический подвес;
§комбинированный вид подвеса.
По физическому параметру, который используется в акселерометре с целью получения информации об ускорении его основа-
ния, они делятся на, измеряющие:
§линейное или угловое перемещение инерционной массы;
§параметры электрического сигнала (ток или напряжение), обеспечивающего компенсацию инерционной силы или момента, возникающего в результате уско- ренного движения;
§частоту или период колебаний системы подвеса.
Приведенная классификация далеко не полная и отдельные дополнения к ней найдут свое отражение в процессе дальнейшего изложения материала. Кроме то- го, в дальнейшем мы ограничимся рассмотрением особенностей устройства и ра- боты только тех моделей приборов, которые перспективны для использования на морских судах. С иными моделями приборов можно познакомиться в [24].
3.13. Микромеханические акселерометры
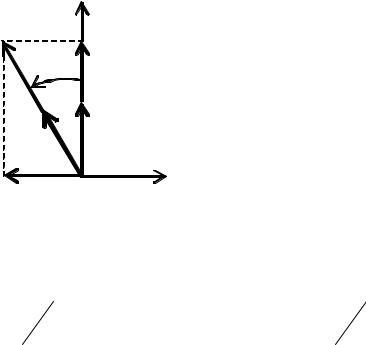
Типовая конструкция микромеханического акселерометра (ММА) содержит инерционную массу, подвешенную к основанию прибора с помощью упругих свя- зей. И масса и элементы подвеса выполняются по единой пленочной технологии и совместно с емкостным датчиком выходного сигнала, электростатическим устрой- ством, компенсирующим удельную силу, приложенную к ЧЭ, а также элементами усиления и преобразования сигнала объединяются в общую интегральную микро- схему. Один из типовых вариантов схемы ММА показан на рис. 3.20 [3]. Инерцион- ная масса т под действием внешней силы имеет возможность перемещения в на- правлении, показанном стрелкой. Это перемещение регистрируется дифференци-
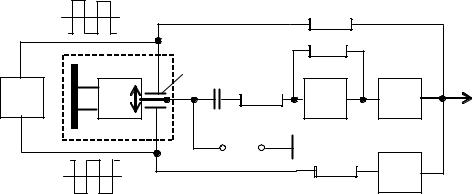
альным емкостным датчиком сигнала ДС, который питается напряжением типа “ме- андр”, поступающим от осцилятора О. Переменное напряжение, амплитуда кото-
|
|
|
Uос |
R3 |
|
|
|
|
|
|
ДС |
R1 |
R2 |
|
|
|
|
|
|
|
|
|
|
|
||
О |
т |
|
У |
ФД |
|
|
|
|
|
С |
Uвых |
|
|
||||
|
ЧЭ |
|
|
|
|
|
||
|
|
U= |
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
-Uос |
R4 |
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 3.20 |
|
|
|
|
|
|
|
|
рого |
пропорциональна |
|
смещению |
|
инерционной |
массы, |
а, |
|
следовательно, и удельной силе, действующей на нее, через конденсатор С поступа- ет на вход усилителя У. Коэффициент усиления усилителя определяется сопротив- лениями R1 и R2. После усиления, сигнал датчика ДС выпрямляется фазовым детек- тором ФД. Полярность выпрямленного сигнала будет определять направление сме- щения массы, и в результате – направление ускорения. Таким образом, напряжение Uвых несет в себе полную информацию об измеряемой величине.
Указанное напряжение используется также для компенсации силы, приложенной к массе т. С этой целью оно через сопротивление R3 подается на одну из обкладок датчика ДС. На другую его обкладку через сопротивление R4 поступает напряжение Uвых, полярность которого инвертором И изменена на противоположную.
С целью компенсации возможных ошибок акселерометра на обкладки датчика ДС может подаваться также постоянное напряжение U=.
Одним из первых твердотельных кремниевых микромеханических акселеромет- ров (ММА), интегрированных с электроникой, был прибор ADXL105, разработан- ный фирмой Analog Device. Чувствительный элемент этого прибора представляет собой пластинку [52] с линейными размерами 0,5 мм х 0,4 мм и толщиной 2 мкм. Вес чувствительного элемента составляет 0,5 микрограмм. При наличии ускорения величиной 1g инерционная масса (указанная пластинка) смещается от своего равно- весного положения на 1 нанометр (1·10-9 м), что составляет примерно 0,07% от воз- можного диапазона его перемещения. Измерительная система акселерометра спо- собна зарегистрировать перемещение, равное 2,1· 10-15 м, что соответствует, при- мерно, 0,002 Ангстрема.
Емкость дифференциального датчика сигнала величиной около 0,15 пикофарады изменяется при наличии ускорения в 1g на 1·10-4 пФ, а его разрешающая способ- ность составляет 2,3·10-8 пФ. Столь незначительные величины изменения емкости затрудняют выделение полезного сигнала из помех, но современная технология, ко- торой владеют наиболее серьезные научные центры и предприятия позволяют ус- пешно преодолевать эту трудность.
ЛИТЕРАТУРА К РАЗДЕЛУ
1.Андронова И.А, Малыкин Г. Б. Физические проблемы волоконной гироскопии на эффекте Саньяка: Успехи физических наук, т. 172, №8, 2002. стр.849-873
2.Анучин О.Н., Емельянцев Г.И. Интегрированные системы ориентации и навига- ции для морских подвижных объектов /под общей ред. Пешехонова В.Г./ -
СПб.,1999. – 357 с.
3.Ачильдиев В.М., Цуцаева Т.В., Цуцаев Д.А. Перспективные чувствительные эле- менты для построения бесплатформенных инерциальных блоков. – Электронный журнал МГУЛ. http://www.mgul.ac.ru/journal/
4.Бычков В.Г., Лукьянов Д.П., Бакаляр А.И. Лазерный гироскоп. – М.: Сов. Радио, 1975.
5.В.Э. Джашитов, В.М. Панкратов Математические модели теплового дрейфа ги- роскопических датчиков инерциальных систем. /Под общей редакцией В.Г. Пе- шехонова. – СПб.: ГНЦ РФ – ЦНИИ “Электроприбор”, 2001. – 150 с.
6.Воронов В.В., Перфильев В.К., Яловенко А.В. Технические средства судовожде- ния: Конструкция и эксплуатация: Учебник для вузов / Под ред Е.Л. Смирнова. –
М.: Транспорт, 1988. – 335 с.
7.Датчик для лазерных гироскопов серии ЗЛК-16 - http://quark.by.ru/produkt.htm
8.Датчики акселерометра. – http://ppk.perm.su/DA.htm
9.Динамически настраиваемые гироскопы - http://www.ppk.perm.su
10.Динамически настраиваемый гироскоп ГВК-6-1 - http://www.rpkb.ru 11.Евстифеев М.И., Унтилов А.А. Конечно-элементный анализ конструкции микро-
механического гироскопа. - Материалы Ш конференции молодых ученых “Нави- гация и управление движением”, ЦНИИ “Электроприбор”, 2001.
12. Егармин Н.Е. Погрешности волнового твердотельного гироскопа. – Препринт ИПМ АН СССР. № 272. М.: 1986.
13.Кучерков С.Г., Шадрин Ю.В. К вопросу о выборе конструктивных параметров микромеханического кольцевого вибрационного гироскопа. - - Материалы Ш конференции молодых ученых “Навигация и управление движением”, ЦНИИ “Электроприбор”, 2001.
14. Лазерный гироскоп КМ-11-1А – http://www.polyus.msk.ru
15.Липатников В. И., Матвеев В.А. Система съема информации твердотельного волнового гироскопа. – Вестник МГТУ им. Н. Э. Баумана, №1, 1997, 109 – 113 с.
16.Малогабаритный динамически настраиваемый гироскоп ГВК-16 - http://www.rpkb.ru
17. Матвеев В.А., Липатников В.И., Алехин А.В. Проектирование волнового твердо- тельного гироскопа: Учебн. Пособие для втузов. – М.: Изд-во МГТУ им. Н.Э.
Баумана, 1997. – 168 с.
18.Миниатюрные динамически настраиваемые гироскопы КИНД-05-081, ПИКВ-05- 011 - http://www.ppk.perm.su
19.Павлов В.А. Гироскопический эффект, его проявления и использование. – Л.: Су- достроение, 1972. – 285 с.
20.Павлов В.А. Теория гироскопа и гироскопических приборов. – Л.: Судостроение, 1964. – 495 с.
21.Пешехонов В.Г. и др. Прогнозные исследования по созданию перспективных вы- сокочувствительных элементов систем управления и навигации на новых физи- ческих принципах до 2015 года: Технический отчет по НИР <<Рысь-АНУ-П>>. СПб.: Академия навигации и управления движением, 1997.
22.Пешехонов В.Г. Современная автономная навигация. Проблемы и перспективы: Материалы научной сессии, посвященной 85-летию А. Ю. Ишлинского. – Спб.: ГНЦ РФ – ЦНИИ “Электроприбор”, 1999, с. 13 – 22.
23.Смирнов Е.Л., Яловенко А.В., Якушенков А.А. Технические средства судовож- дения: Теория: Учебник для вузов /Под ред. Е.Л.Смирнова. – М.: Транспорт, 1988. – 376 с.
24.Студеникин А.И. Инерциальные датчики информации: Учебное пособие. – Ново- российск, НГМА, 2005, 150с.
25.Твердотельный волновой гироскоп ТВГ-3-1 – http://www.rpkb.ru
26.Терешин В.Г., Терешин О.В. Развитие одного направления в механике и технике.
–http://www.anrb.ru/smu/LitTech/tereshin_vg.html
27.Цифровой лазерный гироскоп G-12 - http://istok-eos.ru/navigac/girosk.htm
28.Черняев Р.Н. Международная и навигационная регламентация требований к на- вигационному оборудованию судов. сб. Судостроение за рубежом. ЦНИИ
“Румб”, вып. 8 (200). 1983.
29. Чувствительные элементы. Прибор ТПГ-6М. – http://compass.ur.ru 30.Шереметьев А.Г. Волоконный оптический гироскоп. – М.: Радио и связь, 1987. –
152 с.
31.Яловенко А.В. Богданович М.М. Судовые гироскопические приборы: Учебн. по- собие. – Л.: Судостроение, 1990. – 224 с.: ил.
32.Donati S., Giuliani G., Sorel M. Proposal of a new Approach to the Electrooptical Gyroscope: The GaAlAs Integrated Ring Laser, Alta Frec. Riv. Electron, vol. 10, no 6, 1988, pp 45-48
33.Doscher J. ADXL105: A lower Noise, Wider Bandwidth Accelerometer Rivals Performance of More Expensive Sensors. – Publication http://www.analog.com/publication/magazines/dialogue/archives/33
34.FG314 Twin Axis Dynamically Nuned Gyro – http://www.baesystems-gyro.com 35.Lemaire C. New Generation of Micromachined Accelerometers and DSP Offer Low
Cost Alternative to Machine Condition Monitoring. - http://www.analog.com/industry/iMEMS.
36. Merlo S., Norgia M., Donati V. Fiber Gyroscope Principles – Handbook of Fiber Optic Technology, J. Wiley&Sons Ltd, 2000
37.Micromachined Tunneling Accelerometer. – http://mikromachine.stanford.edu/~clui/MTA.html
38.Vibrating Structure Gyros – http://www.watson-gyro.com
ГИРОСКОПИЧЕСКИЕ КОМПАСЫ И |
Раздел |
|
4 |
||
АЗИМУТЫ |
||
|
4.1. Способы построения гироскопических компасов
Гироскопический компас (ГК) предназначен для определения курса судна от- носительно направления географического меридиана. Впервые на возможность соз- дания подобного прибора еще в 1852 году указал известный ученый Леон Фуко.
Выступая во французской академии наук, он отметил [6]: “…Таким образом, вся-
кое тело, вращающееся вокруг оси, могущей двигаться, не выходя из горизонтальной плоскости, дает новое свидетельство вращения Земли, ибо вращение его создает направ- ляющую силу, которая влечет ось тела к меридиану и располагает это тело так, чтобы оно вращалось в ту же сторону, в какую вращается земной шар. Поэтому вращения тела на поверхности Земли достаточно, чтобы без помощи какого-либо астрономического на- блюдения указывать плоскость меридиана”. Как видим, Фуко в явной форме указывает на возможность построения гирокомпаса на базе гироскопа с двумя степенями сво- боды. Однако такой компас не нашел применения на флоте в силу того, что качка судна существенно снижала точность его работы.
Проблема создания ГК практически не подверженного влиянию качки судна по- требовала использования в качестве его чувствительного элемента гироскопа с тре- мя степенями свободы. Очевидно, что только такой гироскоп, имеющий совершен- ную систему подвеса ротора, может изолировать последний от влияния углового движения основания, на котором он установлен. Однако, указанный прибор, лишен- ный всяких корректирующих воздействий, не способен автоматически совмещать свою главную ось с плоскостью меридиана и, тем самым, не может быть гирокомпа- сом.
Очевидно, необходимо создать такую систему коррекции гироскопа, которая бы заставляла его главную ось устанавливаться в меридиан но, по возможности, не по- рождала бы зависимости ее движения от параметров качки судна. Простейшим об-
разом эта задача решается путем смещения центра массы чувствительного элемента прибора вдоль наружной оси его подвеса. Рассмотрим закон движения главной оси гироскопа при наличии указанного смещения [9].
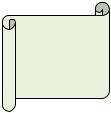
Будем считать, что гироскоп с тремя степенями свободы, к гирокамере ВК (рис. 4.1) которого с целью смещения его центра масс прикреплен груз Q , установлен на
земной поверхности в каком-либо пункте а. Будем также полагать, что в начальный
|
α& |
||
|
Н |
||
Н |
|
|
β Н |
|
|
||
Рис. 4.1
момент времени его главная ось ОА совпадает с плоскостью горизонта и направлена с запада на восток. В этих условиях сила G веса гироскопа, несмотря на наличие расстояния l между его центром тяжести и точкой подвеса О, не будет создавать от- носительно последней никакого момента. Направление вектора G в данном случае будет совпадать с вертикально расположенной осью ОС наружного карданова коль- ца НК и, следовательно, проходить через точку О подвеса гироскопа.
Начальная ориентация гироскопа относительно земной поверхности не будет ос- таваться неизменной. С течением времени вследствие суточного вращения Земли место установки гироскопа будет перемещаться в пространстве. Если за вращением Земли наблюдать извне со стороны северного полюса, будет видно, что это переме- щение совершается против часовой стрелки. Таким образом, по прошествии некото- рого времени место установки гироскопа, совершив вместе с Землей поворот вокруг ее оси, переместится в пространстве на некоторый угол и займет новое положение, обозначенное на схеме точкой б.
В процессе описываемого перемещения гироскоп, стремящийся сохранить на- правление своей главной оси неизменным в пространстве, начнет приобретать все увеличивающийся наклон к горизонту. При этом восточный конец главной оси ОА будет непрерывно подниматься над горизонтом, а западный — опускаться. Вместе с гироскопом вокруг оси 0В будет поворачиваться и груз Q. При наличии угла β меж- ду главной осью и плоскостью горизонта вектор G уже не будет проходить через точку О подвеса гироскопа, обусловливая тем самым возникновение момента MВ, действующего на гироскоп относительно его внутренней оси подвеса ОВ. Нетрудно заметить, что величина момента MВ определяется произведением , которое вследствие малости угла β может быть принято равным Glβ и, следовательно, счи- таться пропорциональной углу β. Направление вектора момента MВ совпадает с по-
ложительным направлением оси 0В, т.е. будет перпендикулярно плоскости чертежа и указывать на читателя.
Как только момент МВ начнет действовать на гироскоп, возникнет прецессионное движение вокруг наружной оси ОС. В результате главная ось ОА гироскопа, поворачи- ваясь вокруг оси ОС с угловой скоростью α& , станет приближаться к плоскости гео- графического меридиана. При этом вектор кинетического момента Н гироскопа будет двигаться в направлении к северному географическому полюсу, как это показано на схеме в положении в. Как видим, описанный гироскоп приобретает способность уста- навливаться в меридиан и, тем самым, превращается в компас с маятниковой коррек- цией. Нередко его называют гирокомпасом с непосредственной коррекцией.
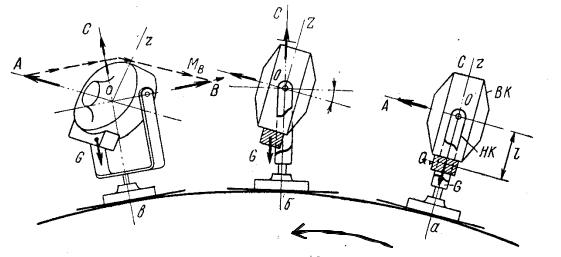
Поскольку, стремясь к меридиану, гироскоп одновременно движется по двум уг-
αт |
|
лам α и β, траектория, опреде- |
|
ляющая положение главной |
|
βт |
|
оси гироскопа на плоскости а – |
х0 |
|
β (рис. 4.2), представляет собой |
|
|
|
β0 |
Вβ |
эллипс[15] |
α β
у0
Рис. 4.2
Величина β0 характеризует
тот необходимый угол наклона главной оси гироскопа, при ко- тором обеспечивается непре-
рывное движение этой оси в мировом пространстве вслед за
плоскостью земного меридиана.
Период Т0 незатухающих колебаний гироскопа около положения равновесия определяется следующим выражением:
|
|
|
|
|
Т0 = 2π |
H |
. |
(4.1) |
|
BΩ3 cosϕ |
||||
|
|
|
Из полученного выражения вытекает, что значение Т в процессе плавания не оста- ется постоянным, а зависит от широты места судна. В связи с тем, что величина ки- нетического момента Н, как правило, достаточно велика, на практике рассматривае- мый период составляет несколько десятков минут, что значительно превышает пе- риод качки судна. Это существенно повышает устойчивость главной оси гироскопа при работе в различных условиях эксплуатации. Однако рассматриваемые прецес- сионные колебания порождают периодическую ошибку в показаниях ГК, для ис-
ключения которой их необходимо погасить. С этой целью компас следует снабдить тем или иным демпфирующим устройством. Характер движения главной оси гиро- скопа и положение ее устойчивого равновесия в данном случае зависит от вида ис- пользуемого демпфирующего устройства. Подробнее этот вопрос будет рассмотрен ниже.
Подводя итог сказанному, отметим, что для построения морского ГК следует:
§взять за основу гироскоп с тремя степенями свободы;
§снабдить его устройством, создающим относительно внутренней оси подвеса ротора момент, пропорциональный углу отклонения главной оси гироскопа от плоскости горизонта;
§снабдить прибор устройством, демпфирующим прецессионные ко- лебания гироскопа, возникающие в процессе его установления в ме- ридиан.
4.2.Скоростная девиация гироскопического компаса
При работе ГК на судне, движущемся с постоянной скоростью, его главная ось, как правило, не устанавливается в истинный меридиан, а составляет с ним некото- рый угол, который образует его скоростную девиацию. Причина появления скоро-
|
|
|
|
|
|
|
|
стной девиации имеет простое физическое объяс- |
|||
|
|
ωΣ |
|
х0 |
|
|
нение. Главная ось ГК, принудительно удерживае- |
||||
|
|
|
|
|
мая в плоскости горизонта, стремится совместиться |
||||||
|
|
|
δv |
ω3 |
|
с горизонтальной |
составляющей |
вектора угловой |
|||
|
|
|
|
|
|
скорости вращения этой плоскости в пространстве. |
|||||
|
|
|
|
|
|
|
|
||||
|
|
|
Н |
|
ωхо |
|
При неподвижном относительно земной поверхно- |
||||
|
|
|
|
|
|
сти положении ГК плоскость горизонта вращается |
|||||
|
|
|
ω1 |
|
|
|
у0 |
лишь вокруг оси ох0 (рис. 4.3) с угловой скоростью |
|||
|
|
|
|
0 |
|
ωхо = Ω3 cosϕ [15]. При работе ГК на судне, дви- |
|||||
Рис. 4.3 |
|
|
|
жущемся курсом К со скоростью v, угловая ско- |
|||||||
|
|
|
|
|
|
|
|
рость вращения плоскости горизонта складывается |
|||
из |
|
трех |
составляющих: |
упомянутой составляющей ωхо , |
составляющей |
||||||
ω |
3 |
=VE |
Rз cosϕ |
, |
и составляющей ω = −VN |
R3 |
. Взаимная ориентация указанных |
||||
|
|
|
|
1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
векторов на плоскости горизонта показана на рис. 4.3. Из рисунка следует, что вектор результирующей угловой скорости ωΣ вращения плоскости горизонта повернут относи- тельно направления на север на угол δv, величина которого определяется следующим ра- венством: